Ken Hasselmann and Mauro Birattari (April 2020)
|
Table of Contents |
The statistical data of all runs is available for
You can find below the robot behavior of all 8 methods tested in pseudo-reality
AutoMoDe-Gianduja2 |
AutoMoDe-Gianduja2E |
AutoMoDe-Gianduja3 |
AutoMoDe-Gianduja3E |
EvoCom2 |
EvoCom3 |
EvoCom2X |
EvoCom3X |
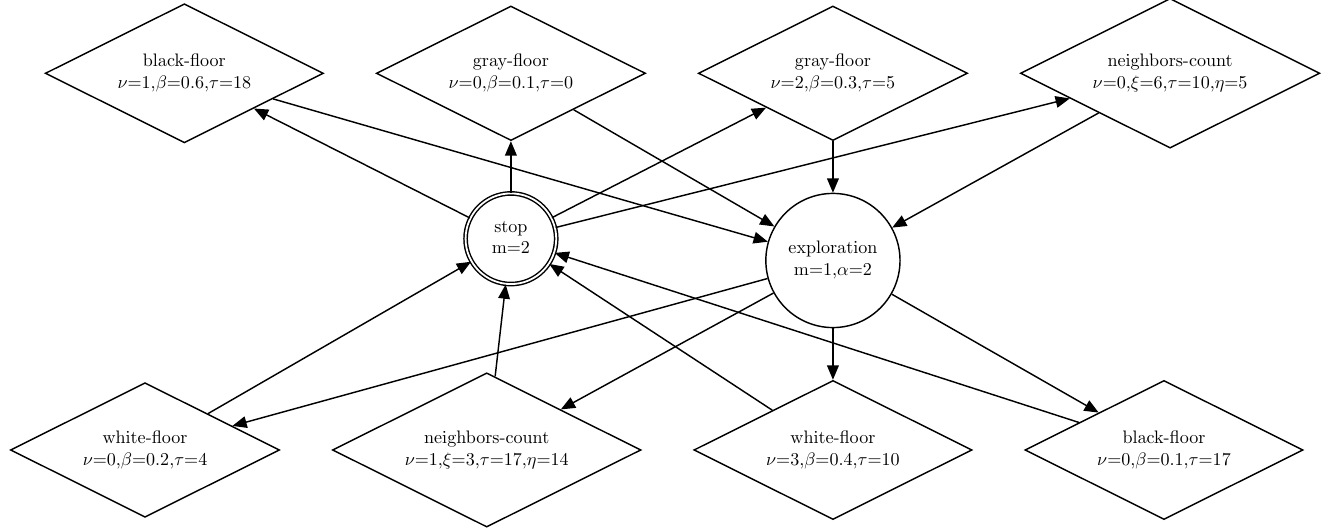
Example of probabilistic finite-state machine produced by Gianduja2E In all states, \(m\) is the broadcast parameter, other parameters are the same as in Gianduja---see finite-state machine examples of study A. In all conditions, \(\nu\) is the message ID and \(\tau\) is the threshold parameter. Other parameters are the same as in Gianduja---see finite-state machine examples of study A.
The controllers of all experimental runs are available for