Ken Hasselmann and Mauro Birattari (April 2020)
|
Table of Contents |
In this further analysis, we present additional results to support the conjectures made in Study B on why Gianduja fails to produce satisfactory results.
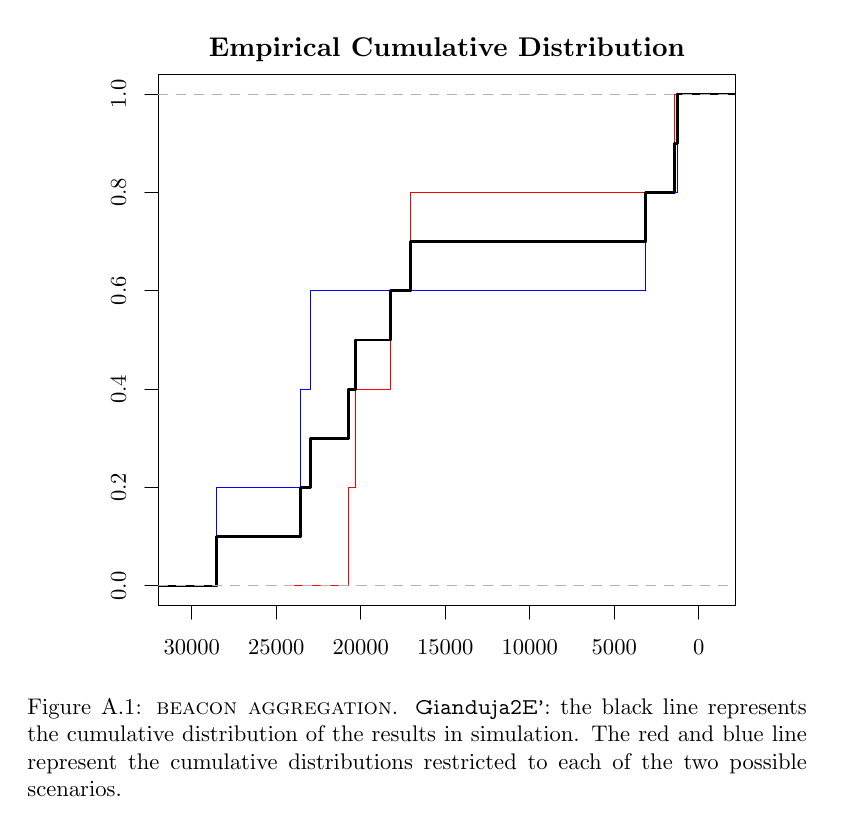
To support our conjecture that Gianduja produces poor results because the finite-state machines adopted are not sufficiently ex pressive, we present an improved version of Gianduja2E that we shall call Gianduja2E’. In Gianduja2E’, the automatic design process is allowed to generate finite-state machines comprising up to 6 states and up to 6 outgoing edges from each state. We also increase the duration of an experimental run to 240 s. At visual inspection, the performance of the control software produced by Gianduja2E’ obtains satisfactory results and, in most cases, robots aggregate on the correct spot. Videos are available below. Results reported in Fig.A.1 show that control software generated by Gianduja2E’ performs similarly in the two scenarios.
The statistical data of all runs is available for
You can find below the robot behavior of the method tested in simulation
Case 1AutoMoDe-Gianduja2E |
Case 2AutoMoDe-Gianduja2E |
You can find below some sample controllers.
AutoMoDe-Gianduja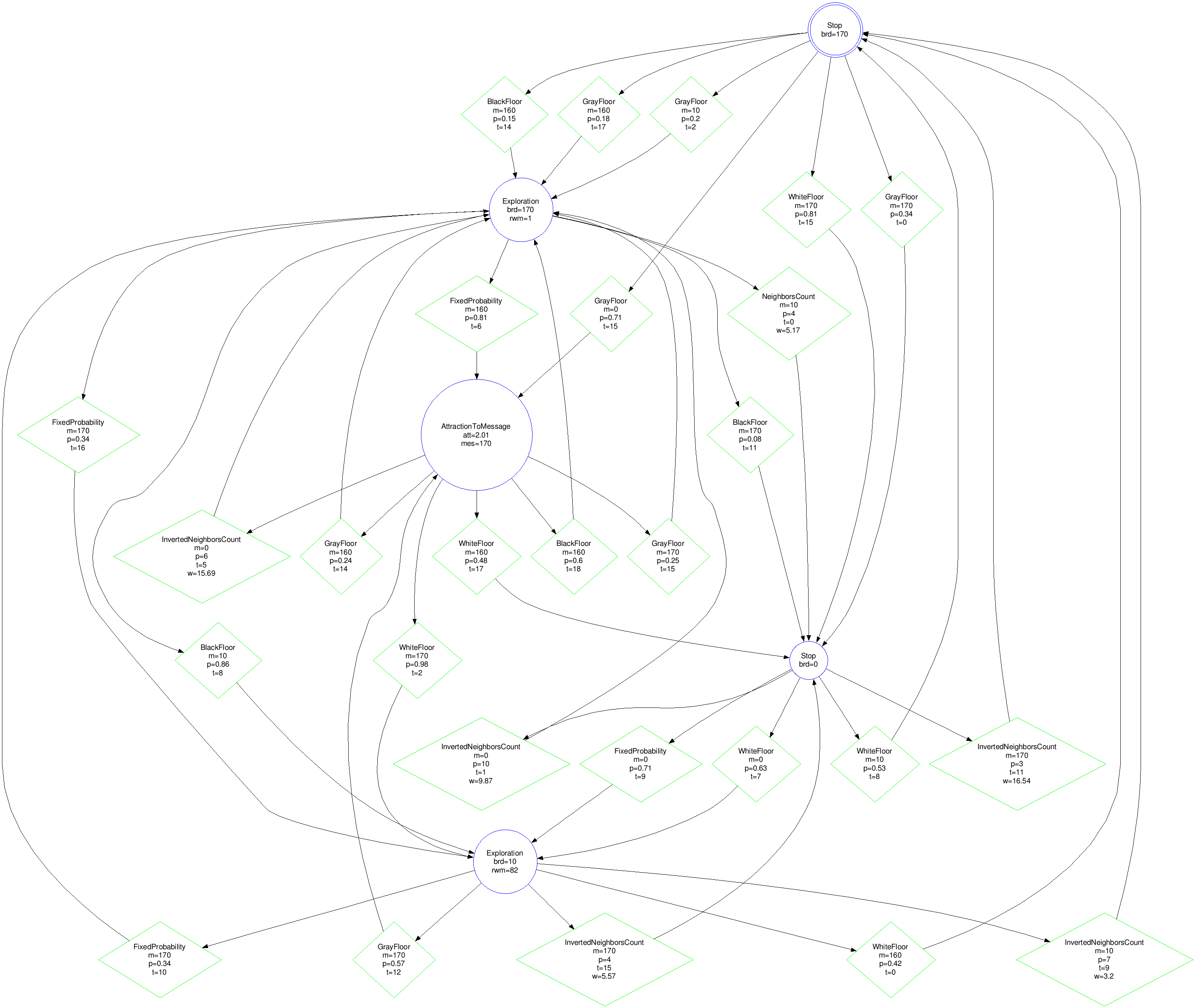
|
The controllers of all experimental runs are available for
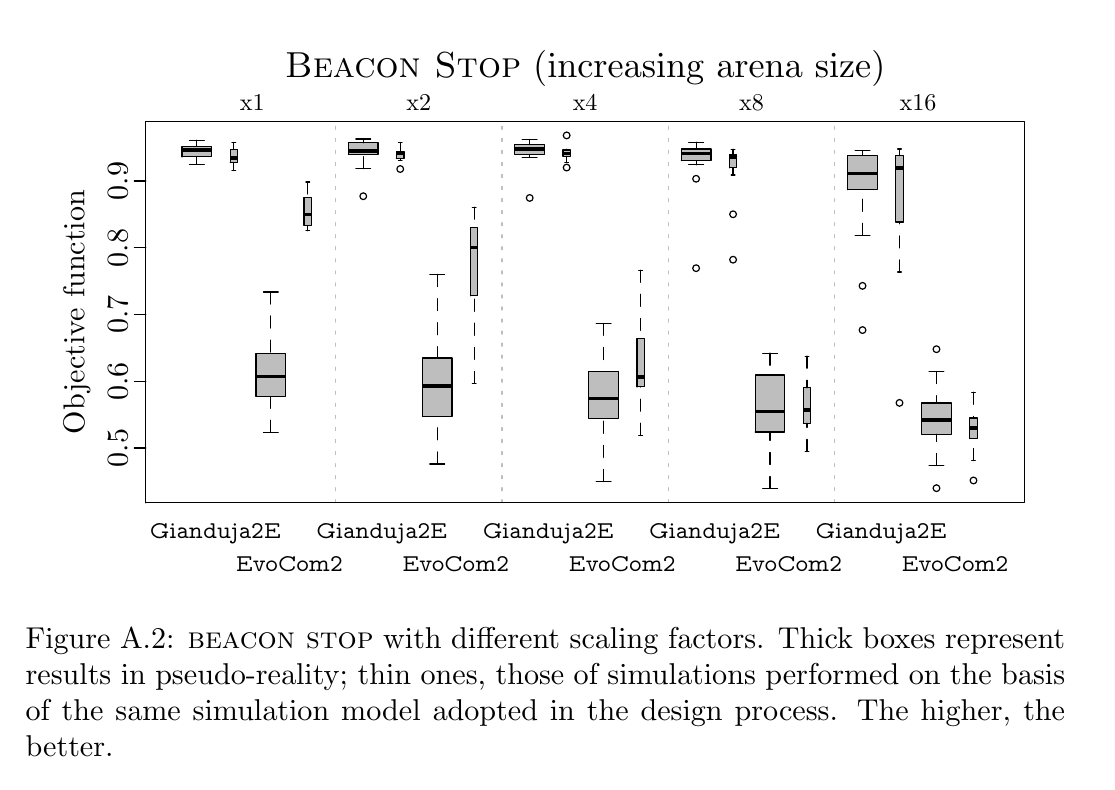
To support our conjecture on scalability, we test the control software generated by EvoCom2 and Gianduja2E in arenas of larger surface and with a larger number of robots—scale factors: 2, 4, 8, and 16. Results are reported in Fig.A.2. They show that, both in simulations performed with the design model and in pseudo-reality, Gianduja2E yields good performance for all considered scaling factors. On the other hand, the performance of EvoCom2 drops slightly in pseudo-reality (where it was already relatively low) and largely on the design model.
The statistical data of all runs is available for
Original sizeAutoMoDe-Gianduja2E |
Original sizeAutoMoDe-EvoCom2 |
size x2AutoMoDe-Gianduja2E |
size x2AutoMoDe-EvoCom2 |
size x4AutoMoDe-Gianduja2E |
size x4AutoMoDe-EvoCom2 |
size x8AutoMoDe-Gianduja2E |
size x8AutoMoDe-EvoCom2 |
size x16AutoMoDe-Gianduja2E |
size x16AutoMoDe-EvoCom2 |
| Sensor/actuator | MA | MB |
|---|---|---|
| proximity | [-0.05,0.05] | [-0.05,0.05] |
| light | [-0.05,0.05] | [-0.90,0.90] |
| ground | [-0.05,0.05] | [-0.05,0.05] |
| range-and-bearing | 0.85 | 0.9 |
| wheels | 0.05 | 0.15 |