Purpose
- Community. Keep everyone updated as to what other work is going on in the lab
- Research. Cross germination. Get feedback. Get help on problems. Get ideas.
- Technical Issues. Discuss the technical issues that are faced during the experiments.
Topics
Format
- Informal presentation in the arena
- Demo
- Discussion
Thursday 5th Dec 2013 - Lorenzo
Abstract.
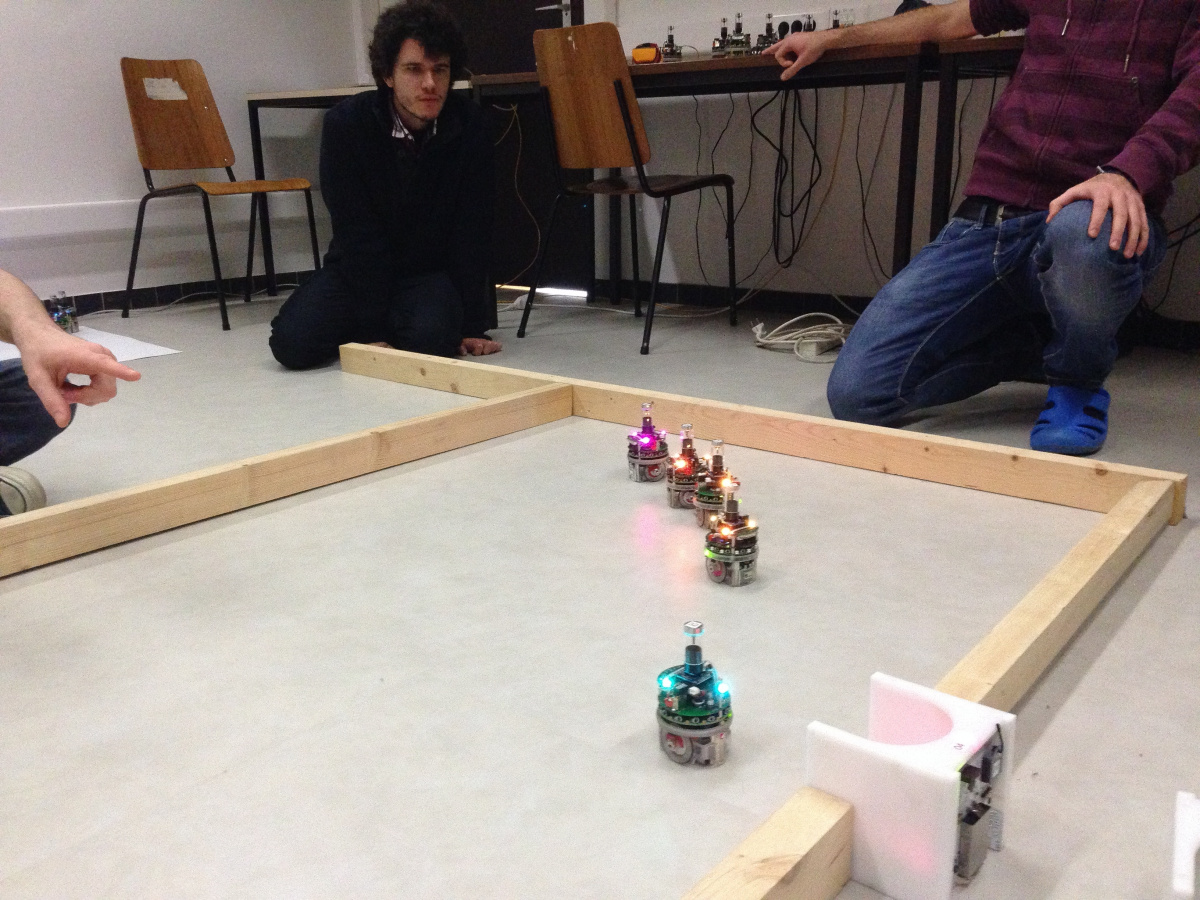
Lorenzo showed his experiment in which a e-puck swarm has to create a chain starting from a TAM.
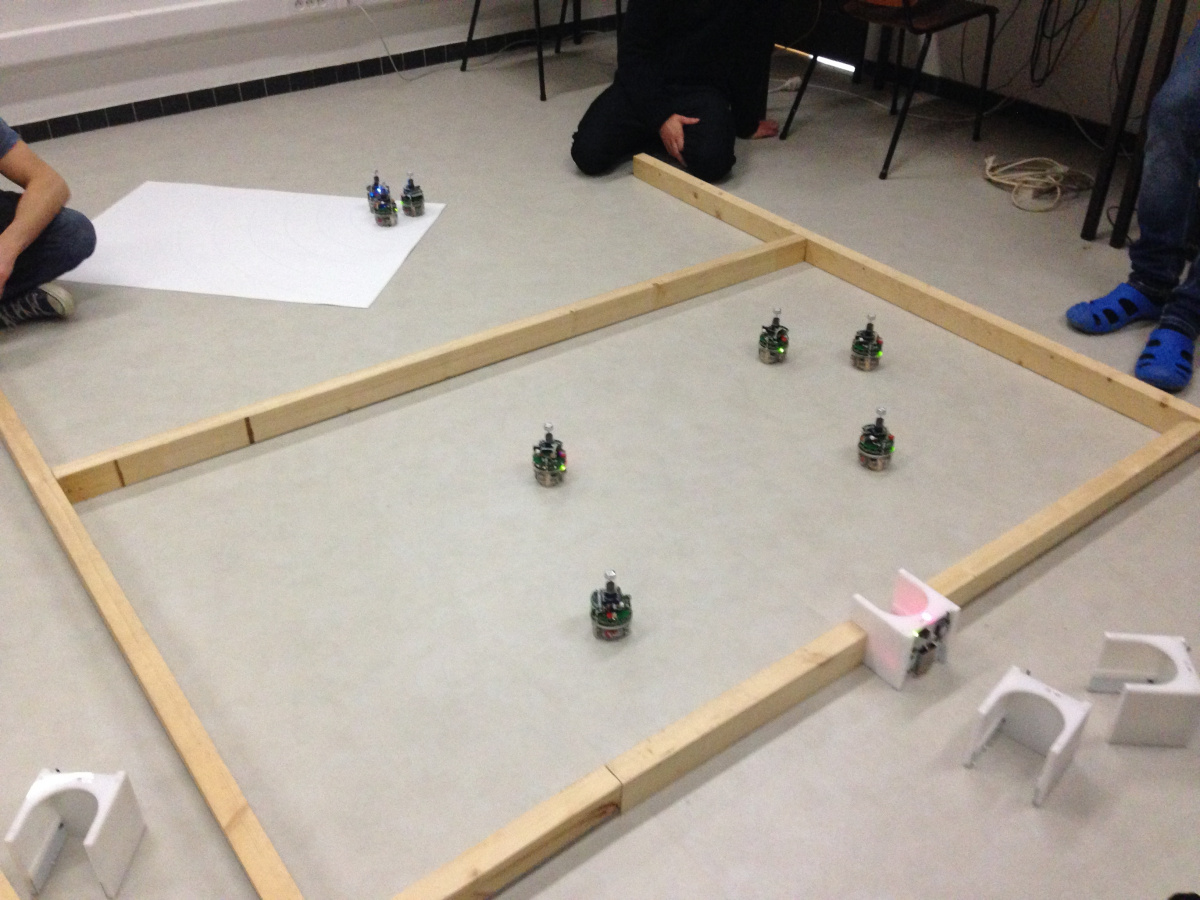
Beginning of the experiment - All the robots are looking for the TAM.
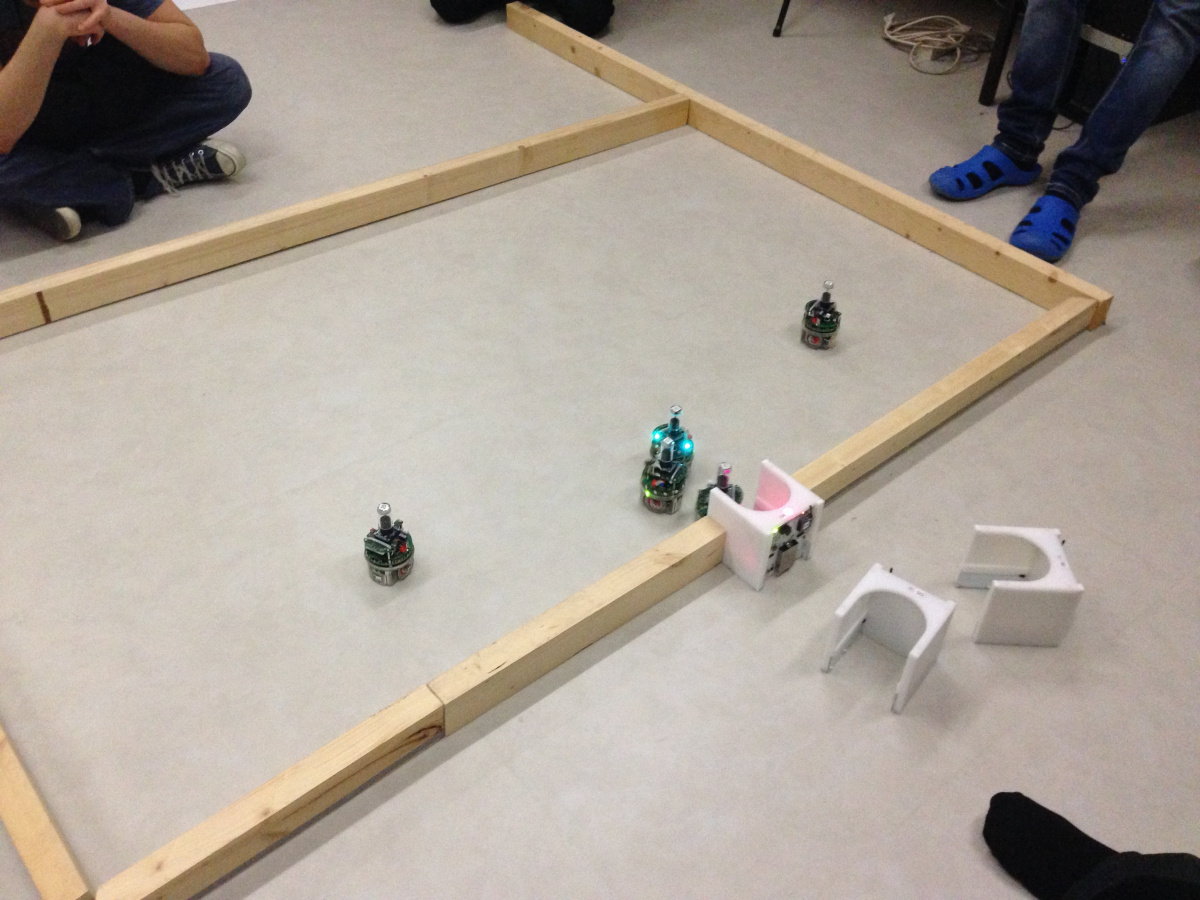
The epuck colored in green is the guardian of the TAM. It entered the TAM and is working as landmark for the other epucks. The next epuck, to enter the TAM will navigate around the guardian and then stop in order to start the chain.
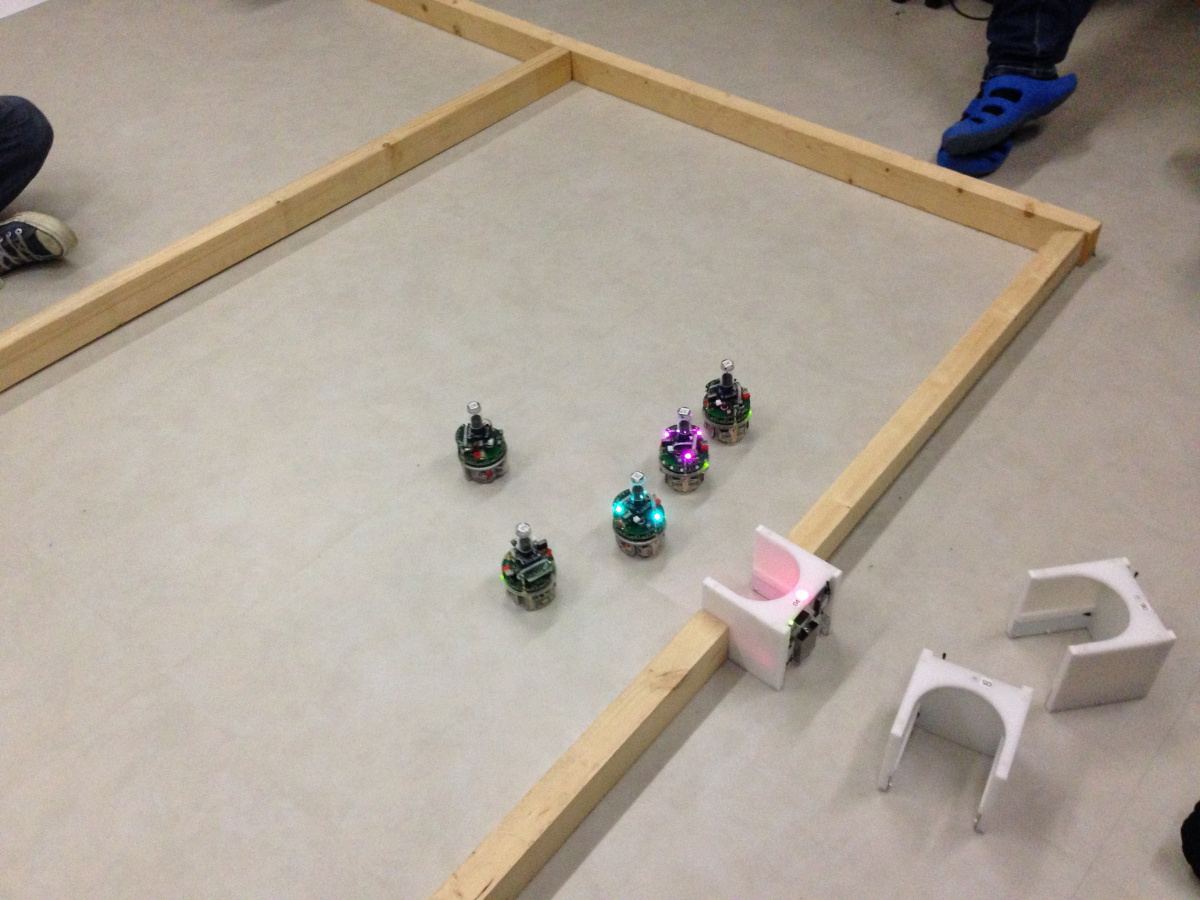
The epuck colored in magenta is in the tail of the chain. The next epuck will continue the chain after the tail.
For short time it can happen that there are two chains due to rab communication delays.
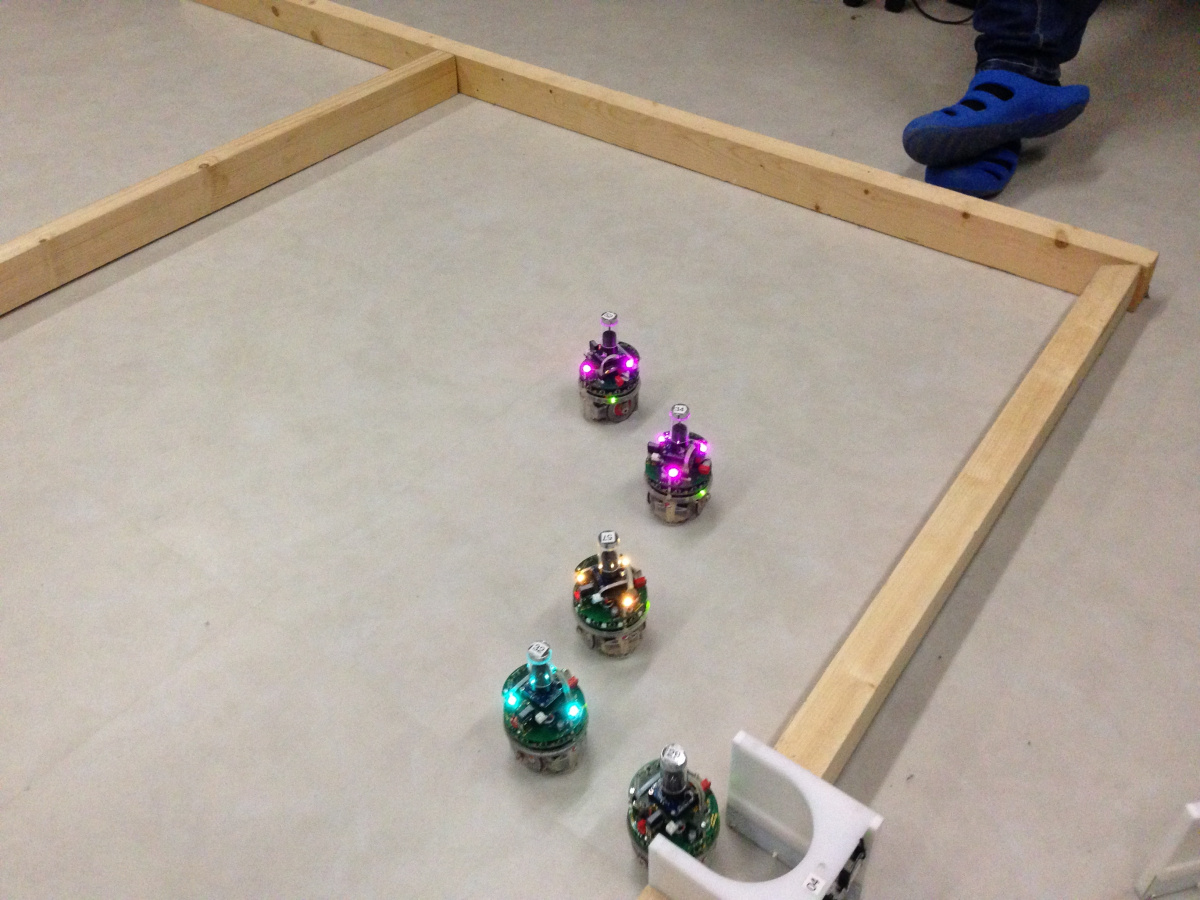
The chain is complete. From this moment the robot try to align in order to create a straight chain.
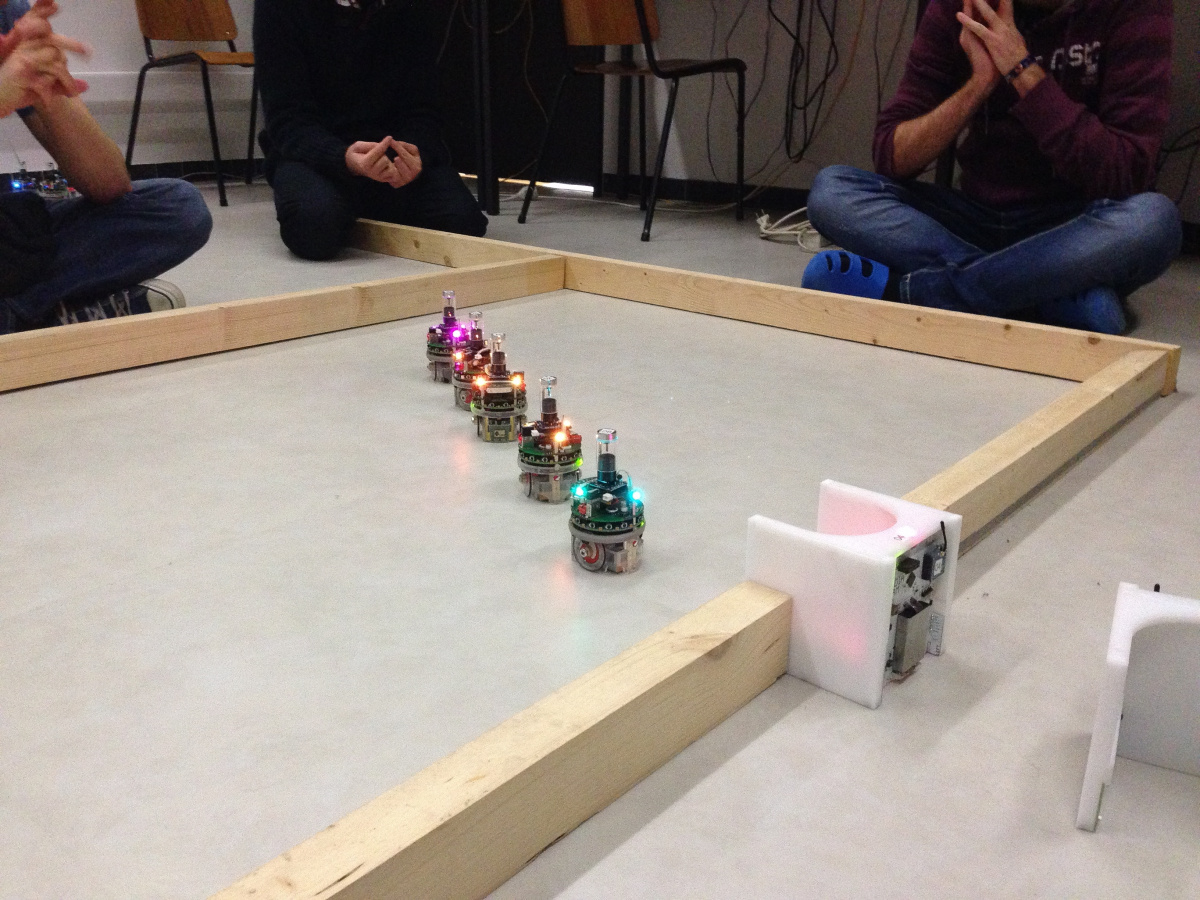
End of the experiment - the chain is perfectly straight.
Issues





