Collective perception is an important capability for security and monitoring activities. Thanks to their inherent characteristics, robot swarms are ideal candidates for achieving collective perception. In particular, the distributed nature of robot swarms allows them to monitor dynamic environments by maintaining a constant presence in the whole space. We propose a novel method to achieve swarm-based collective perception. Here, we demonstrate the method in a task that requires detecting and tracking people in an office environment. We report results obtained in simulation in four different environments with swarms of three different sizes. The robots are fed images sampled from a dataset consisting of pictures taken in a real-word office environment. We empirically measure the distribution of time required for one of the robots to detect that a person has changed their location, and to propagate this information to increasing fractions of the swarm. The results suggest that robot swarms are promising candidate to monitor dynamic environments.
Supplementary video
Additional results
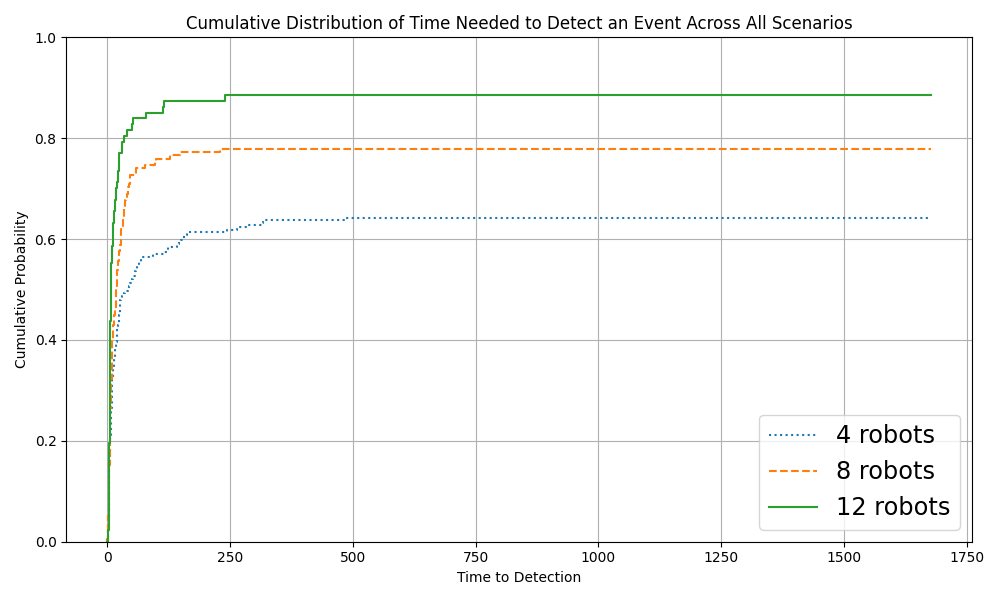
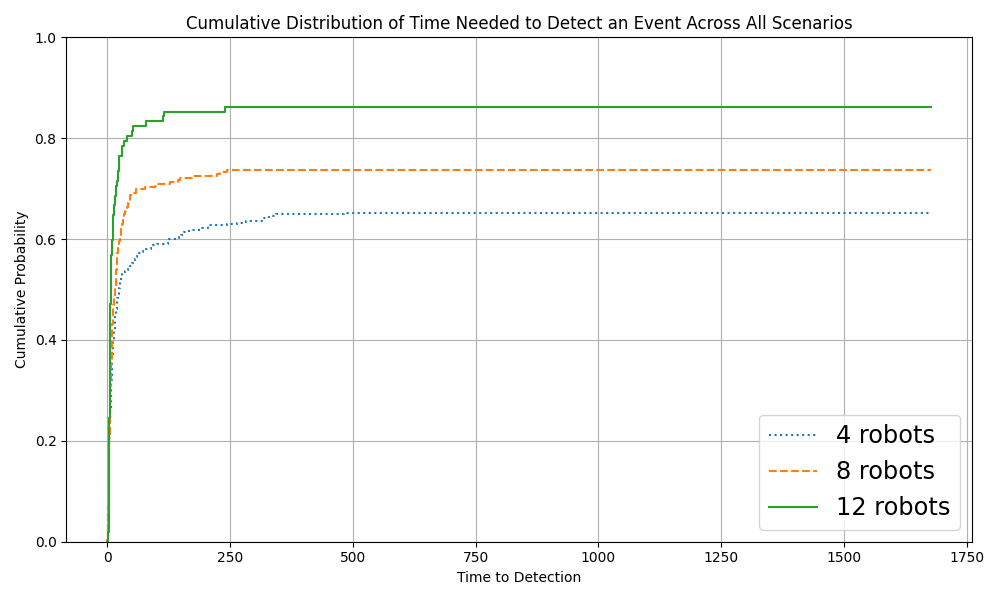
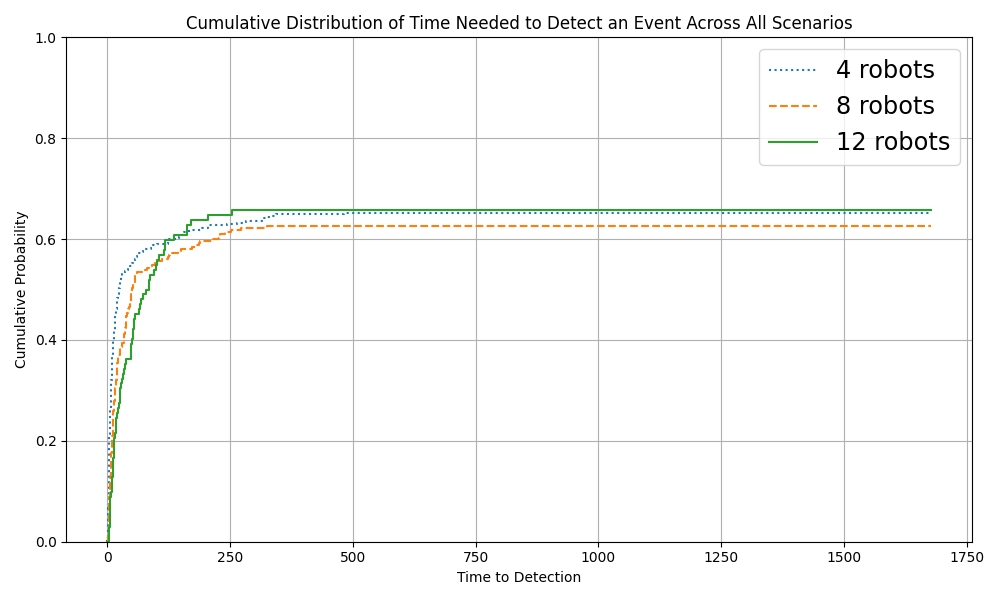
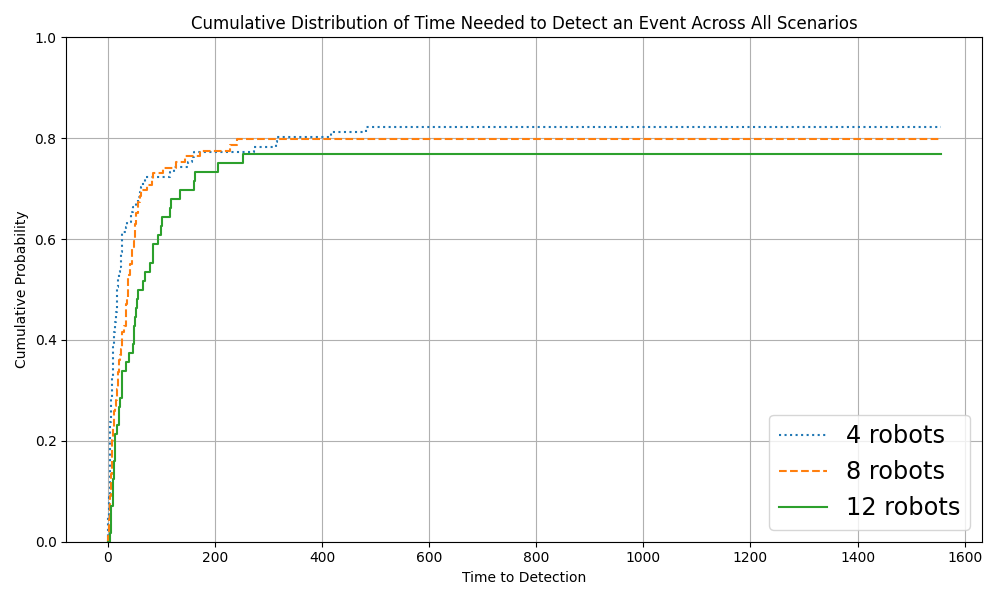
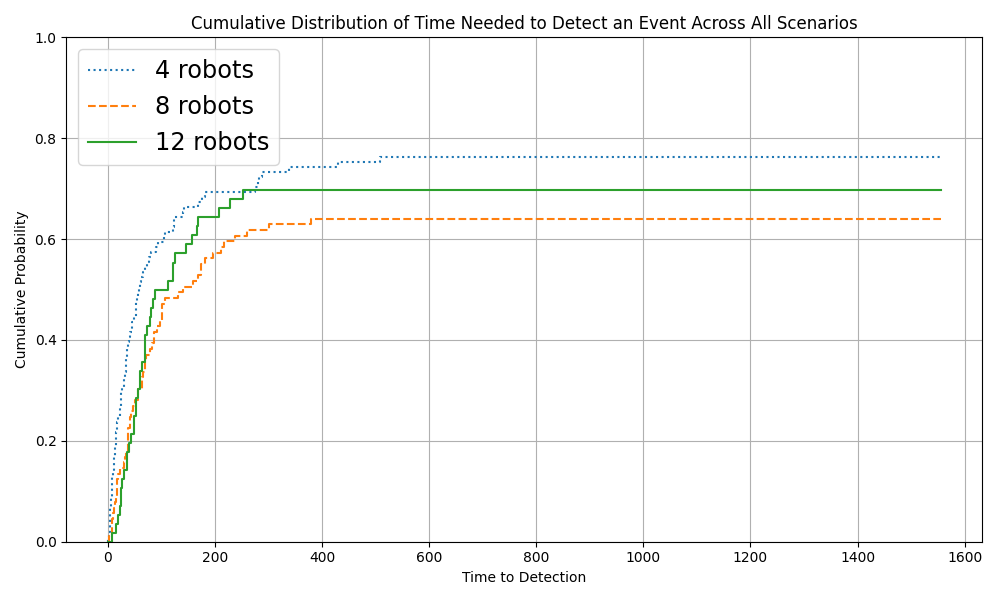
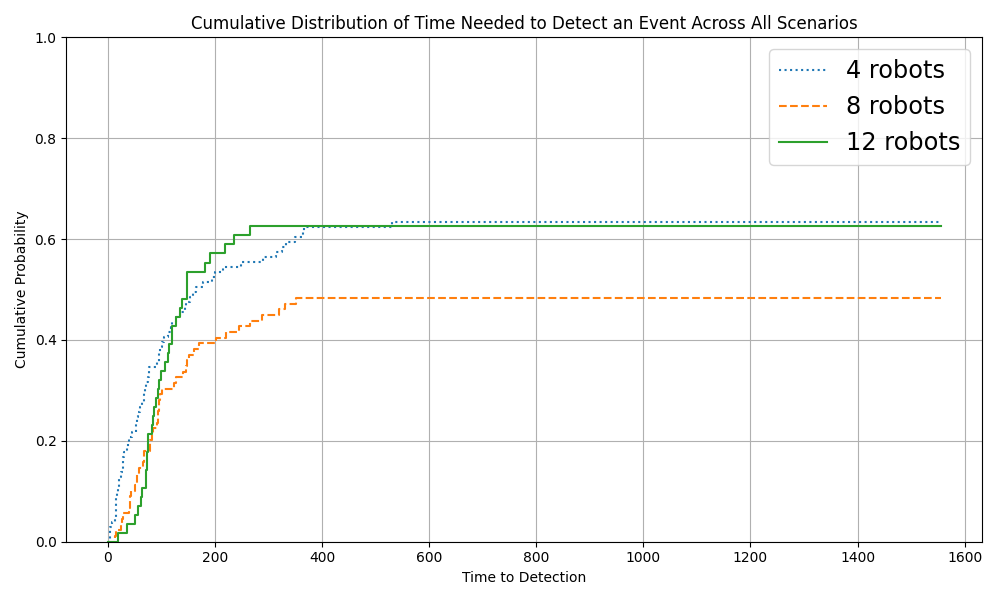
Below are plots showing additional results mentioned in the paper.
First, corridors were not included in the paper's results since, as in real life, persons were not staying there for a long time (usually 20s). As expected, results including corridors are worse than results excluding them, but the difference is small in most cases which indicates than many of these events were still detected by the swarm. Also, this difference increases as the studied portion of the swarm increases. This is also expected: since persons stay in corridors for a very short time, it is very likely that a person changes its location before the information can reach all the robots.
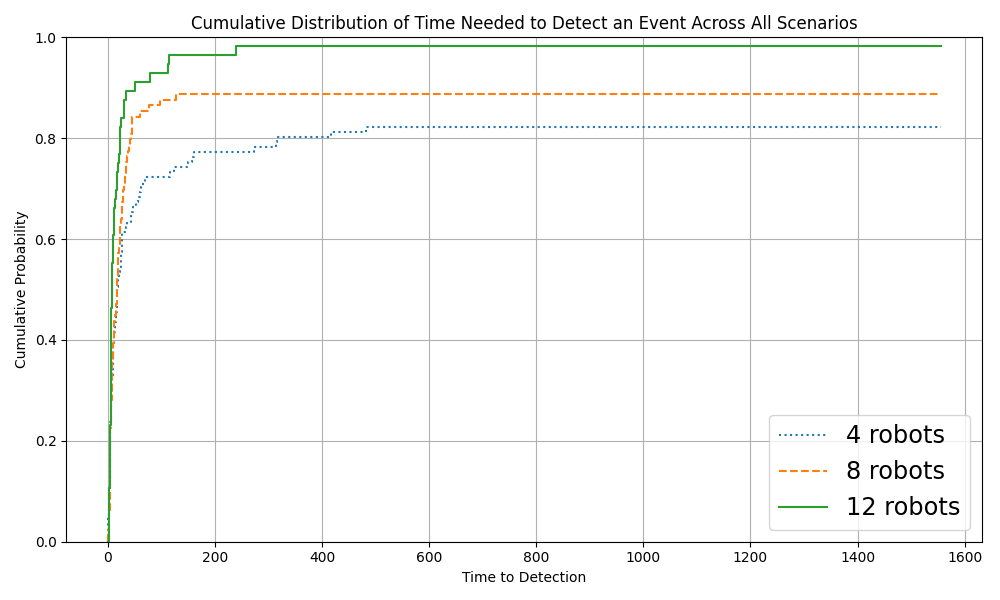
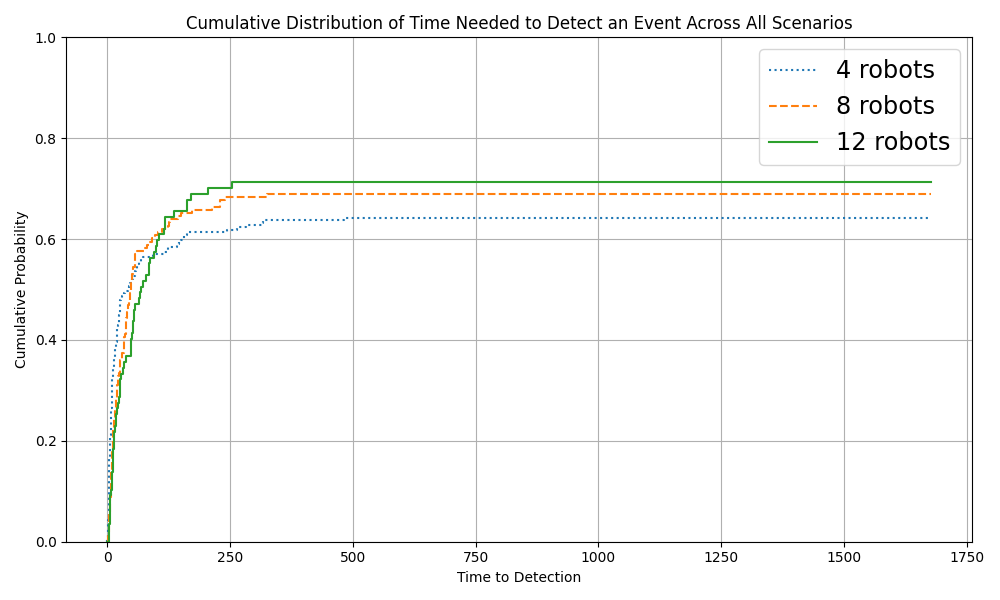
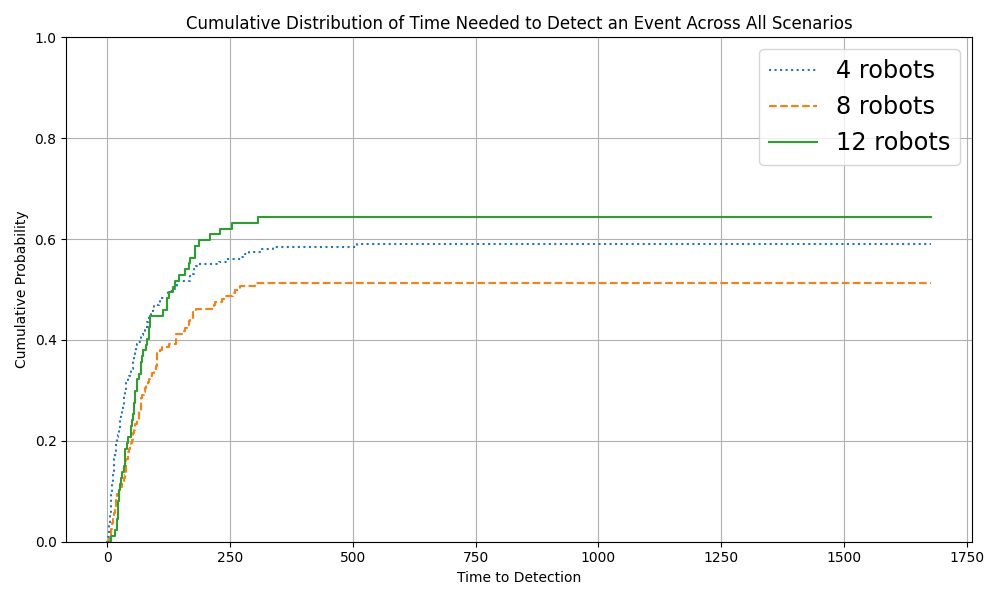
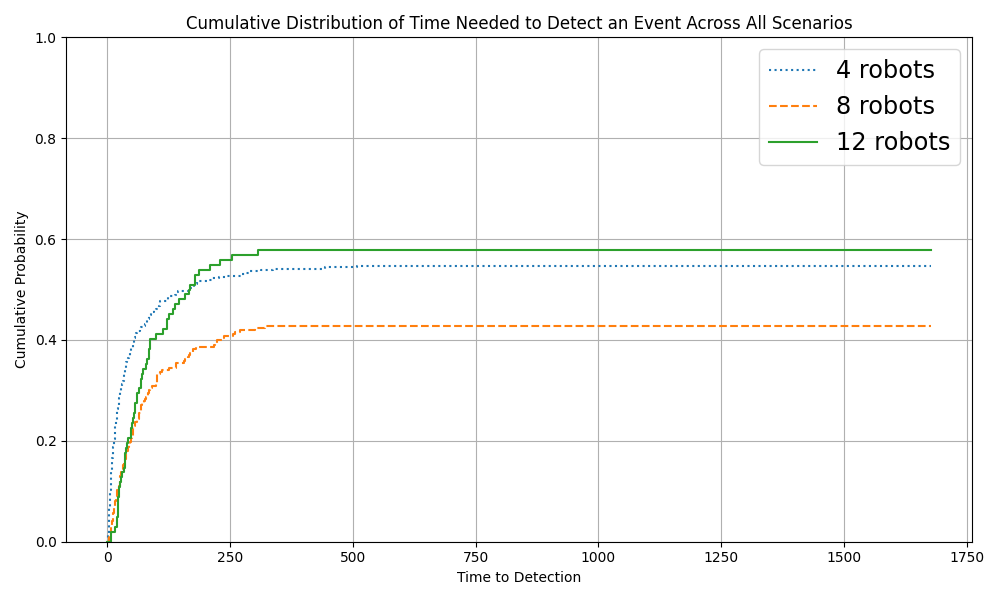
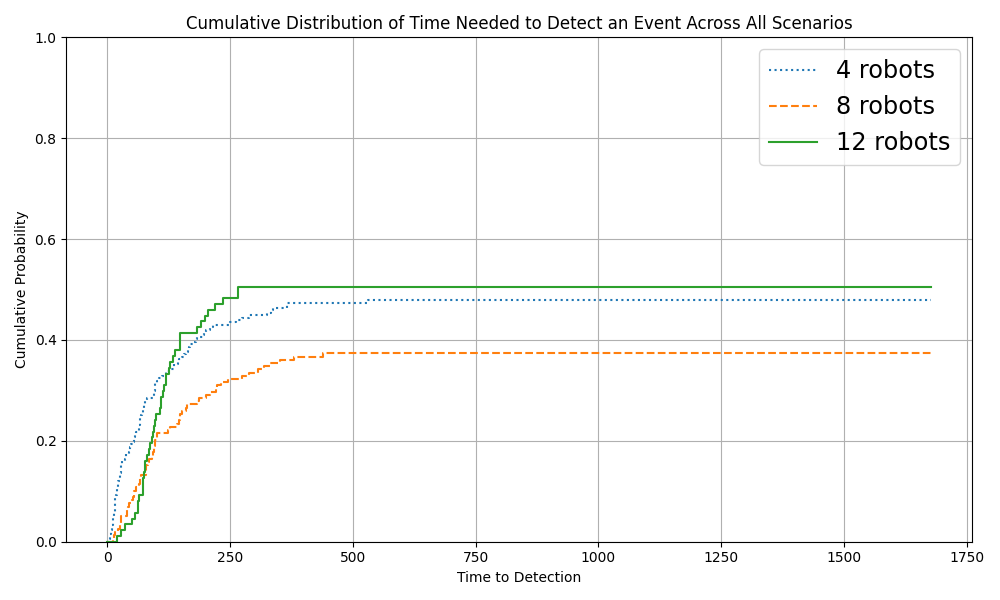
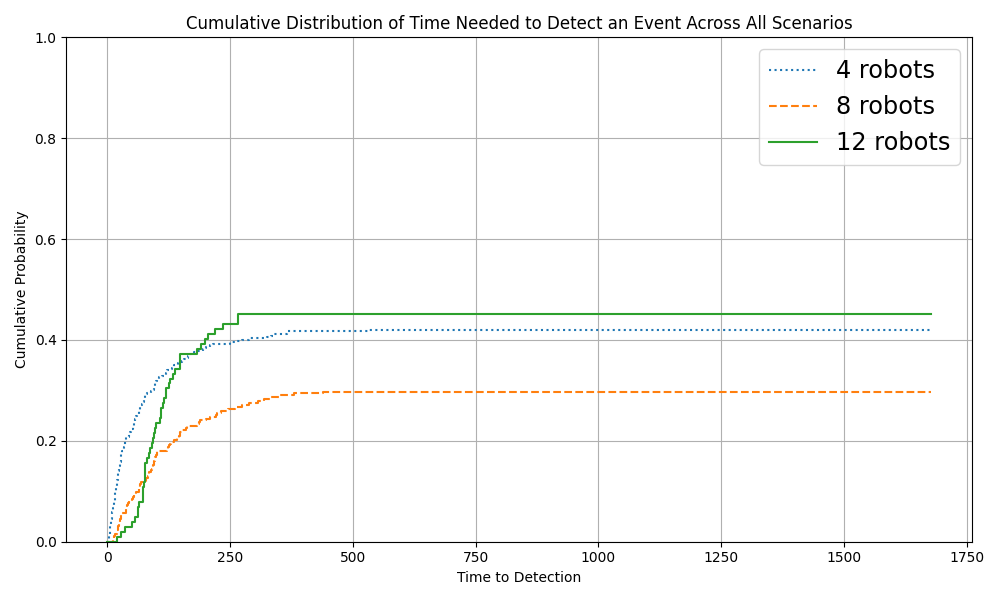
Then, as mentioned in the paper, we observed that certain combinations of locations and scenes resulted in consistent failure of the detection process.
In order to evaluate the impact on the results, we made measurements ignoring events corresponding to these "impossible combinations", and we observed an overall improvement of the results, the 12-robot swarm nearly achieving a 100% detection rate for first detection.