|
I am interested in studying self-assembling robotic systems. In particular, I am interested in understanding how a heterogeneous robotic system that includes aerial robots and self-assembling ground-based robots can autonomously generate task dependent, adaptive robot morphologies. My interests include aspects from research fields such as self-assembling systems, swarm robotics and hormon-inspired robot control.
And why is all this interesting? Well, a self-assembling robotic system has the ability to autonomously (i.e., without human intervention) change its morphology on the fly! If you are thinking about the Transformers right now -- you have pretty much got the idea. But only the idea though, as the state-of-the-art robotic research is not able to deliver anything close to that, yet. In my research, I use a swarm of self-assembling robots called the foot-bots. The foot-bots can drive on the ground and dynamically attach to each other when it is advantageous to do so. However, their abilities to sense the environment are limited. They may not always be able to know when and where to attach to each other. So, I extend the swarm to include a second type of robot called the eye-bots, that can fly and sense the environment in a better way from their elevated positions. This leaves us with a heterogeneous swarm robotic system that can dynamically change its morphology on the ground (i.e., by foot-bots attaching on to each other adaptively) while being guided by some of its airborne swarm members (i.e., from the eye-bots). 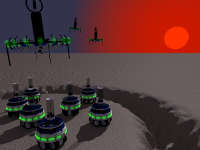 (a)  (b) 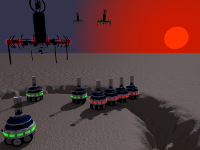 (c) An illustration of the idea discussed above. (a) A swarm including numerous eye-bots and foot-bots is deployed in an environment that contains a ditch. The foot-bots by themselves are only able to detect the ditch and stay away from falling into it. They do not have the sensors to i) determine whether it may be advantageous to cross the ditch and ii) to figure out how the collective morphology may look like that may allow them to cross the ditch. (b) An eye-bot that has a better overview of the environment (meaning it can estimate the width of the ditch and can detect the number of foot-bots close to the ditch etc.) cooperates with the foot-bots by selecting four foot-bots and assisting them to (c) form a chain-like collective morphology that can help these foot-bots to drive over the ditch without falling into it. It may sound disappointing to you -- but this is the kind of Transformers I intend to deliver. |