|

|
H2SWARM: Hierarchical Heterogeneous Swarm.
The main goal of the project is the study of hierarchical communication and control strategies for swarms of
heterogeneous robots, which, despite the differences among sub-groups, coherently operate in an integrated
manner to achieve a common goal. This will be achieved by looking at how Nature structures and organises large
groups, such as ant colonies or honeybee swarms. Natural systems are characterised by different types of
hierarchical organisation (physical, spatial, functional, informational) which evolved to be tightly integrated
and to ensure the survival of the system as a single unit. The H2SWARM project aims at studying the evolution of
cooperative behaviours in hierarchical heterogeneous organisations, and the mechanisms that support hierarchical
organisations in social insects.
|
|
|
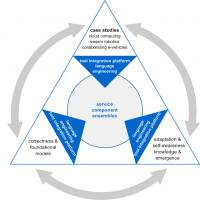
ASCENS: Autonomic Service-Component Ensebles.
Self-aware, self-adaptive and self-expressive autonomic components, running within environments which are called
“ensemblesâ€, have been proposed to handle open-ended, highly parallel, massively distributed systems that can span
millions of nodes with complex interactions and behaviours. However, these complex systems are currently difficult
to develop, deploy, and manage. The goal of the ASCENS project is to build ensembles in a way that combines the
maturity and wide applicability of traditional software engineering approaches with the assurance about functional
and non-functional properties provided by formal methods and the flexibility, low management overhead, and optimal
utilization of resources promised by autonomic, adaptive, self-aware systems.
|


