Bounded aggregation
Unbounded aggregation
Bounded foraging
Unbounded foraging
Bounded grid exploration
Unbounded grid exploration
Gaëtan Spaey, Miquel Kegeleirs, David Garzón Ramos, and Mauro Birattari (January 2019)
|
Table of Contents |
The swarm robotics literature has shown that complex tasks can be solved by large groups of simple robots interacting with each other and their environment. Most of these tasks require the robots to explore their environment, making exploration a basic building block of the behaviors of robot swarms. However, exploration schemes have never been thoroughly evaluated, especially in the context of automatic design. This is notably the case with AutoMoDe, an automatic modular design approach that designs control software by assembling predefined mission-agnostic modules. In AutoMoDe, the exploration strategies embedded in the modules are fixed and were arbitrarily selected. In this article, we study the influence of different exploration schemes on the automatic design of robot swarms. To do so, we introduce AutoMoDe-Coconut, a new instance of AutoMoDe with multiple configurable exploration schemes embedded within its modules. We test Coconut both in bounded and unbounded workspaces. We then compare the results with those of AutoMoDe-Chocolate in order to understand the impact of the new exploration schemes. The results show that Coconut is prone to select exploration schemes that fulfill the requirements of the mission in hand. However, Coconut does not perform better than Chocolate, even in situations where the only exploration schemes available to Chocolate are at an apparent disadvantage. We conjecture that the overall exploration capabilities of the swarm are not the mere reflection of individual-level exploration schemes but result from a more complex interaction between the atomic behaviors of the individuals.
AutoMoDe Coconut, as well as the loop function and ARGoS files are available for
You can find below sample videos of the bounded foraging experiment.
Chocolate |
Coconut |
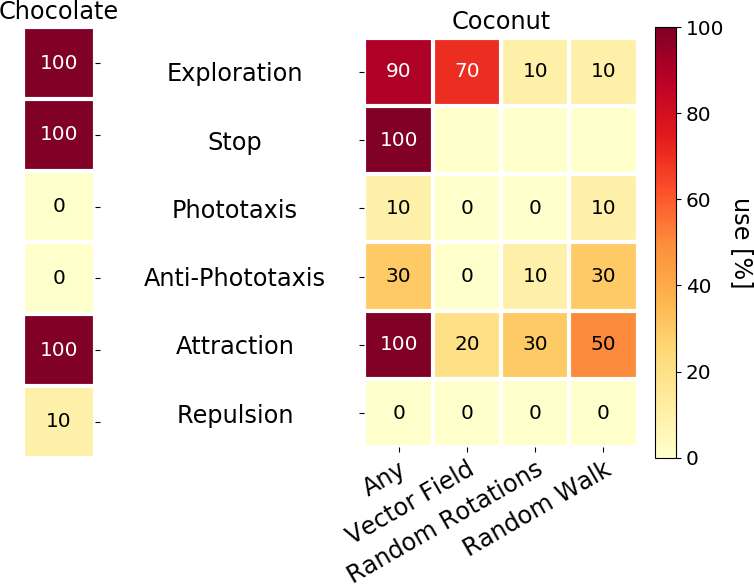
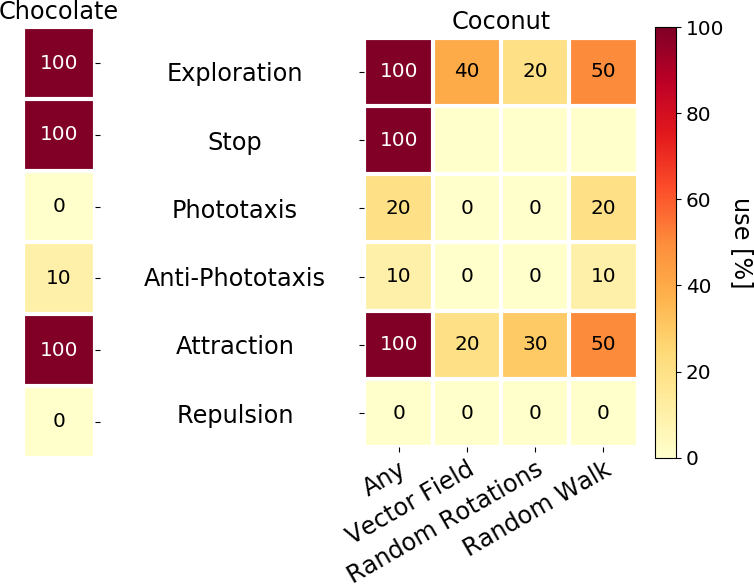
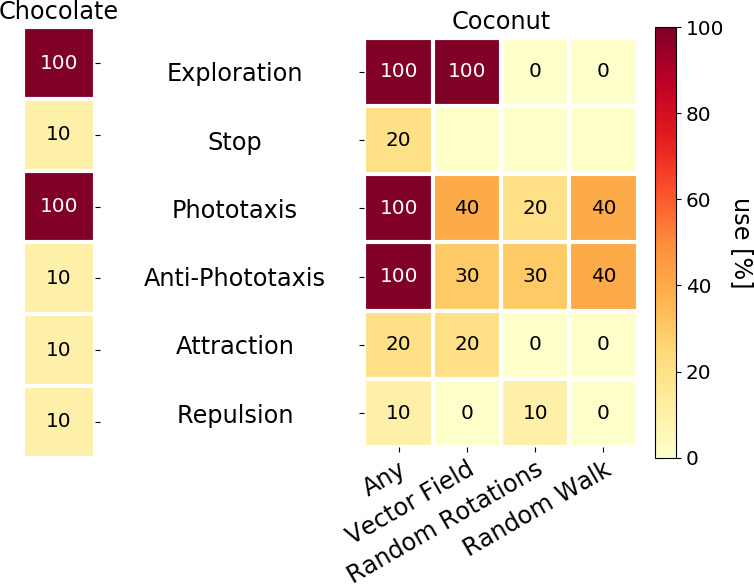
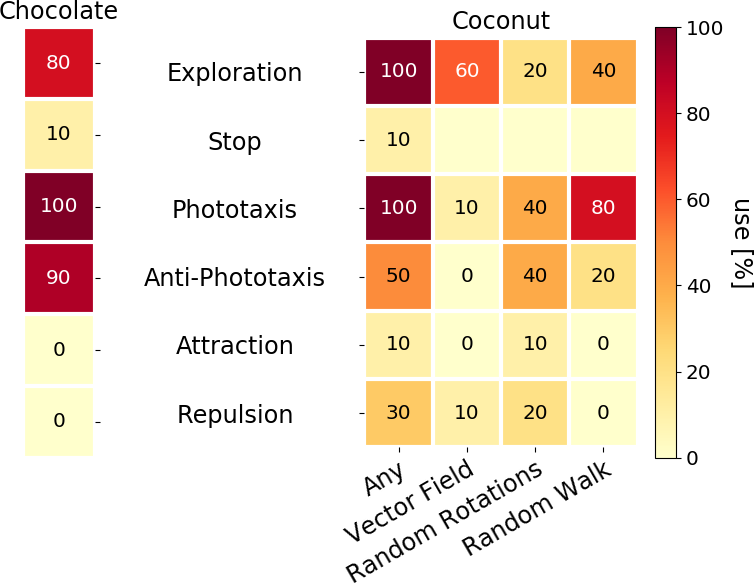
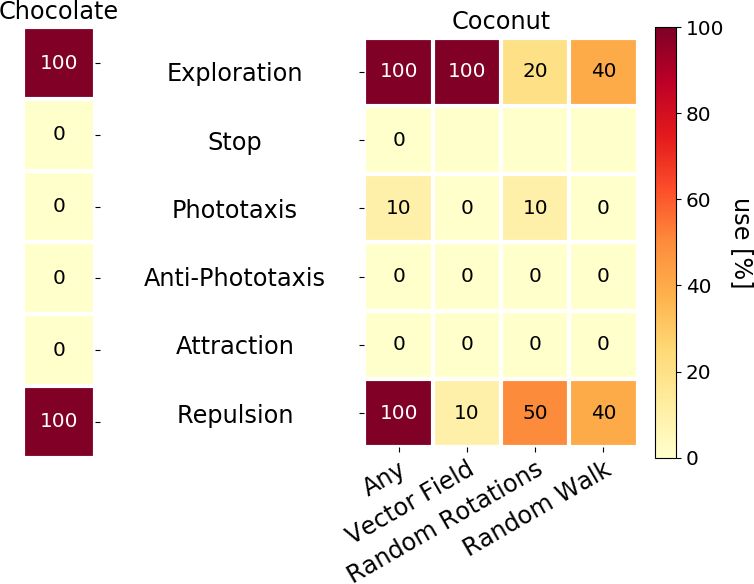
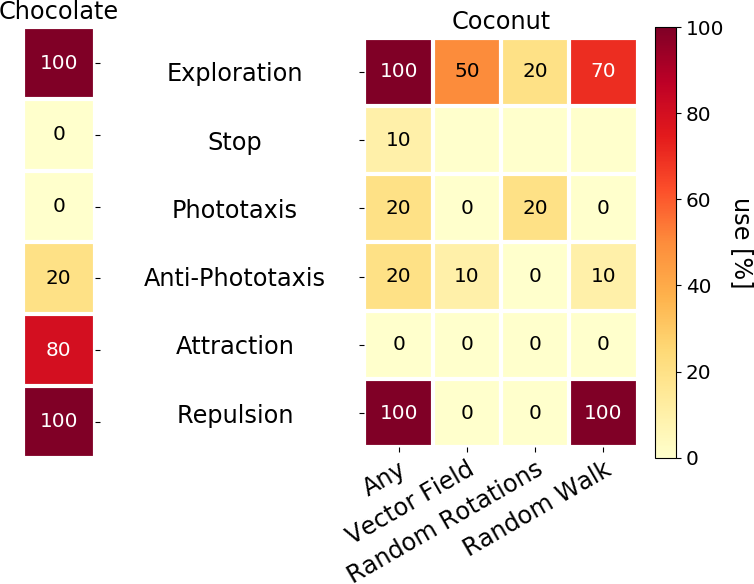
You can find below additional results for both Coconut and Chocolate regarding the presence of modules in the finite state machines they produce as well as for the runtime use of these modules.
Bounded aggregation
|
Unbounded aggregation
|
Bounded foraging
|
Unbounded foraging
|
Bounded grid exploration
|
Unbounded grid exploration
|
Bounded aggregation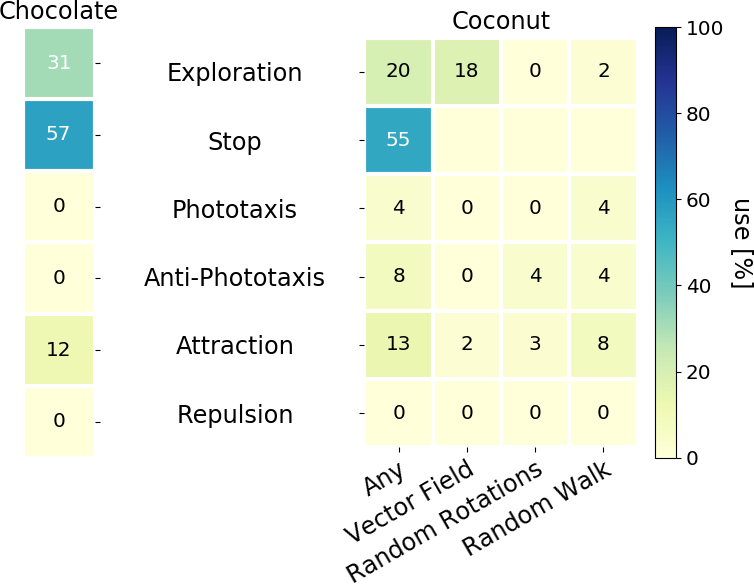
|
Unbounded aggregation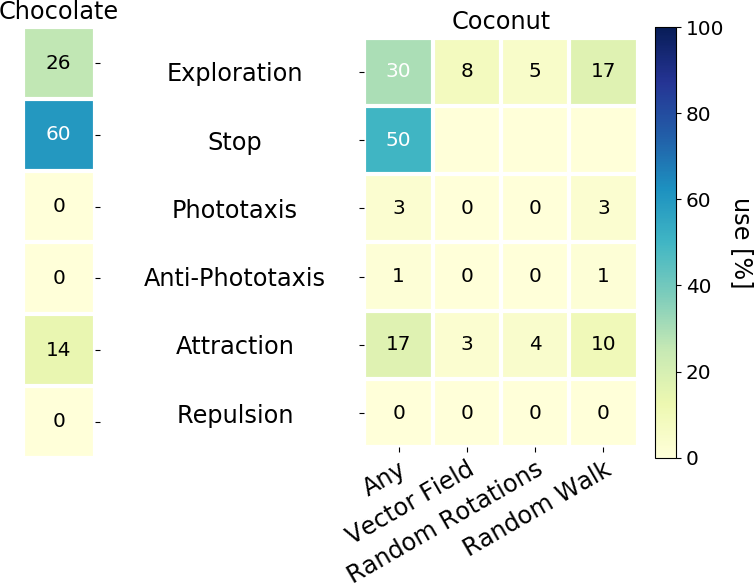
|
Bounded grid exploration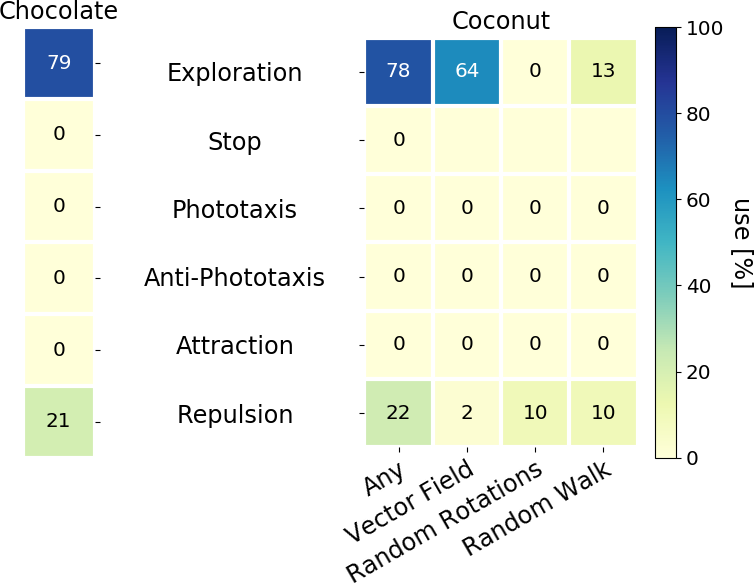
|
Unbounded grid exploration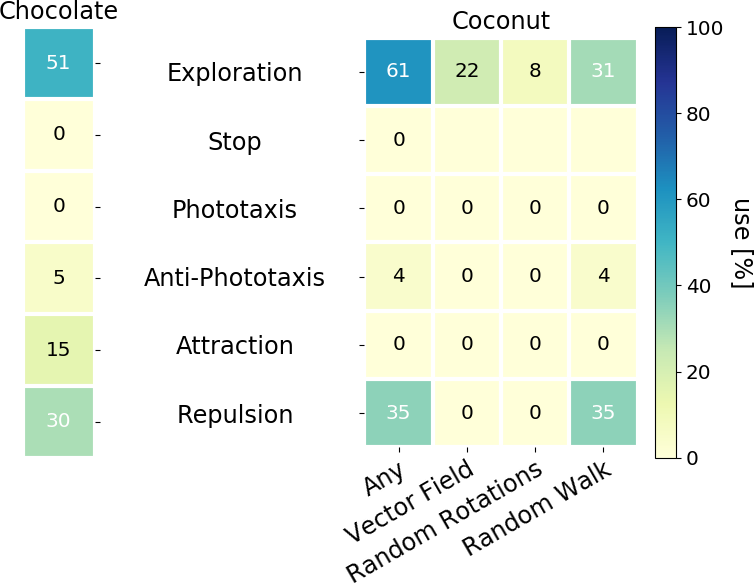
|