AutoMoDe-Gianduja
AutoMoDe-Chocolate
Ken Hasselmann, Frédéric Robert, and Mauro Birattari (April 2018)
|
Table of Contents |
We introduce Gianduja, an automatic design method that generates communication-based behaviors for robot swarms. Gianduja extends Chocolate, a previously published design method. It does so by providing the robots with the capability to communicate using one message. The semantic of the message is not a priori fixed. It is the automatic design process that implicitly defines it, on a per-mission basis, by prescribing the conditions under which the message is sent by a robot and how the receiving peers react to it. We empirical study Gianduja on three missions and we compare it with the aforementioned Chocolate and with EvoCom, a rather standard evolutionary robotics method that evolves communication-based behaviors. We evaluate the behaviors produced by the three automatic design methods on a swarm of 20 e-puck robots. The results show that Gianduja uses communication meaningfully and effectively in all the three missions considered. The aggregate results indicate that, on the three missions considered, Gianduja performs significantly better than the two other methods under analysis.
The statistical data of all runs is available for
You can find below three videos per mission that illustrates the real robot behavior of each method. All the other videos ar also available for download below.
EvoCom |
AutoMoDe-Gianduja |
AutoMoDe-Chocolate |
The videos of all experimental runs are available for
EvoCom |
AutoMoDe-Gianduja |
AutoMoDe-Chocolate |
The videos of all experimental runs are available for
EvoCom |
AutoMoDe-Gianduja |
AutoMoDe-Chocolate |
The videos of all experimental runs are available for
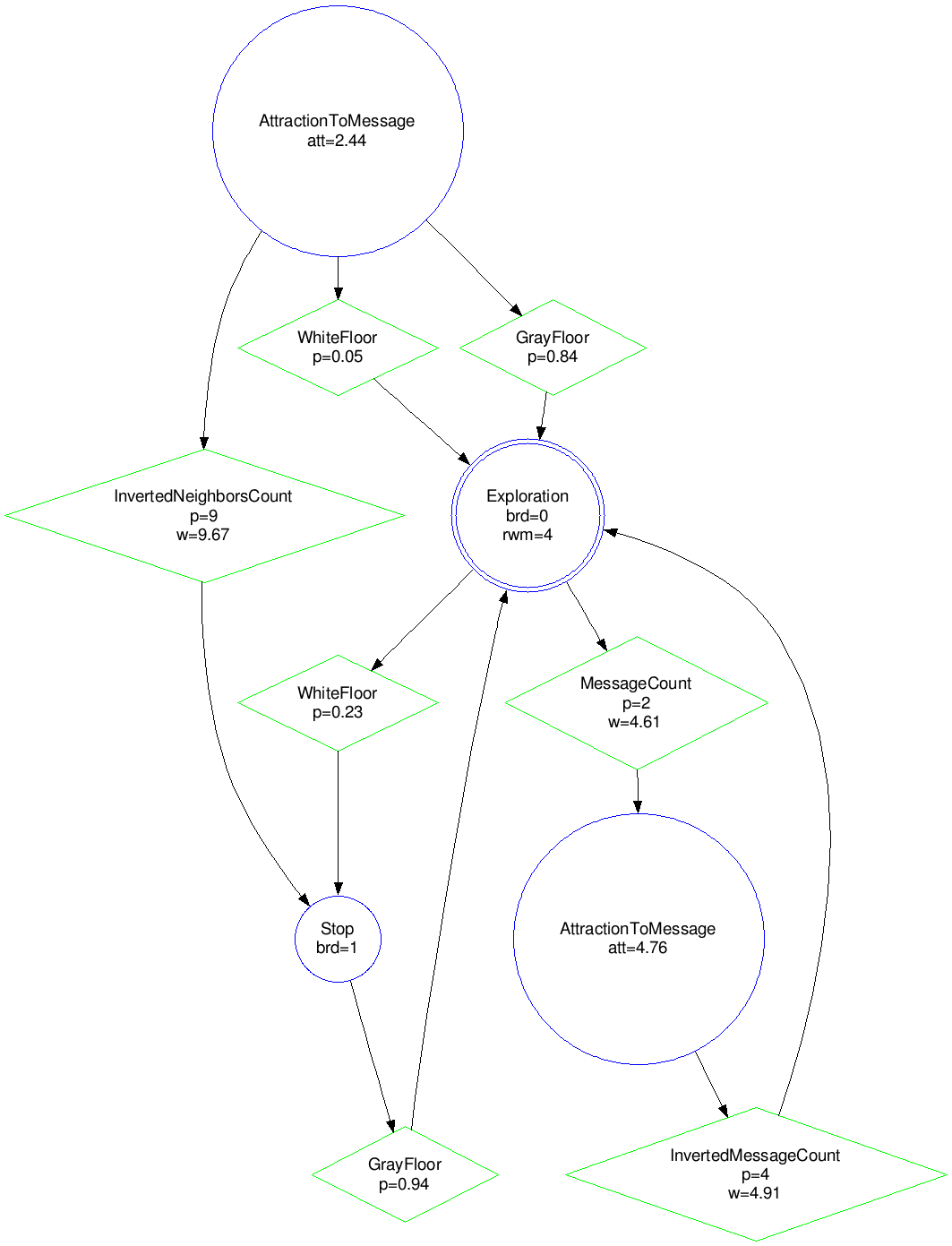
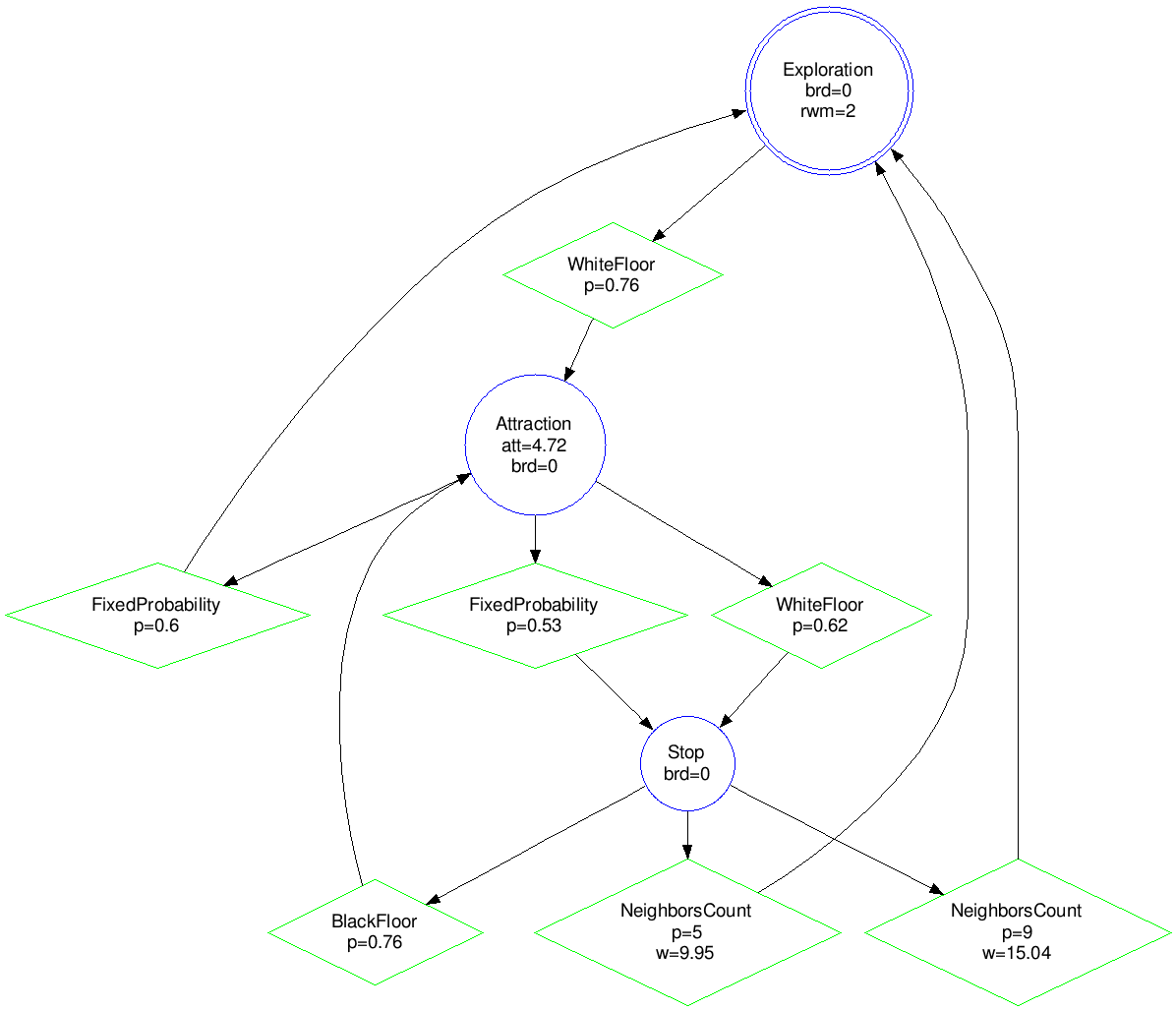
You can find below some sample controllers for each mission for the two methods that use probabilistic finite state machines (Gianduja and Chocolate).
AutoMoDe-Gianduja
|
AutoMoDe-Chocolate
|
The controllers of all experimental runs are available for
AutoMoDe-Gianduja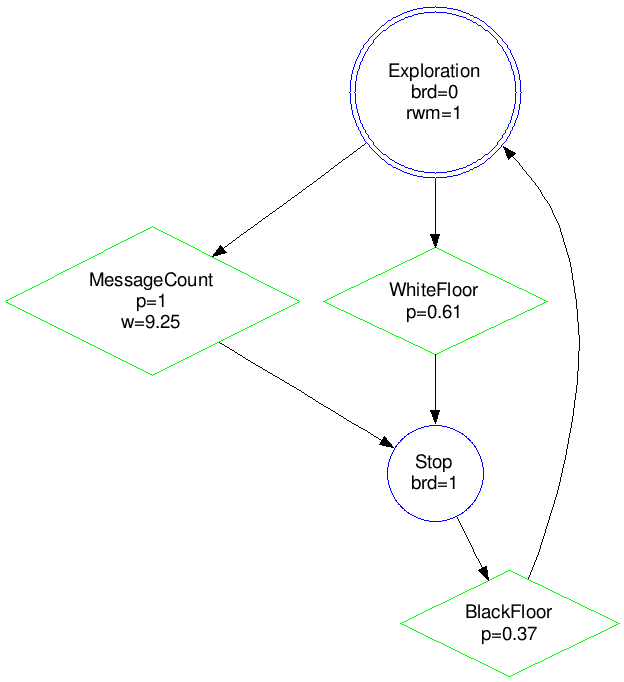
|
AutoMoDe-Chocolate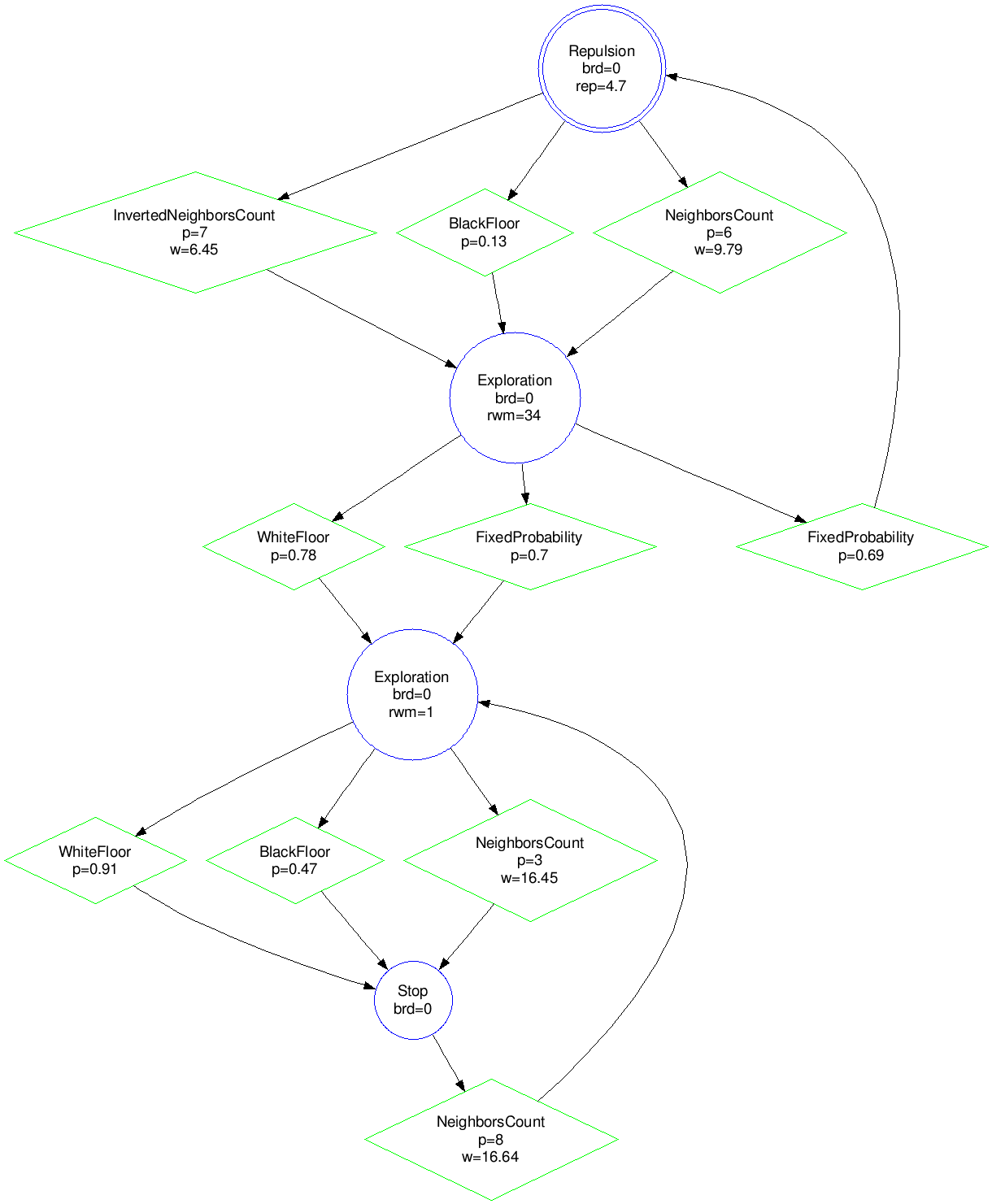
|
The controllers of all experimental runs are available for
AutoMoDe-Gianduja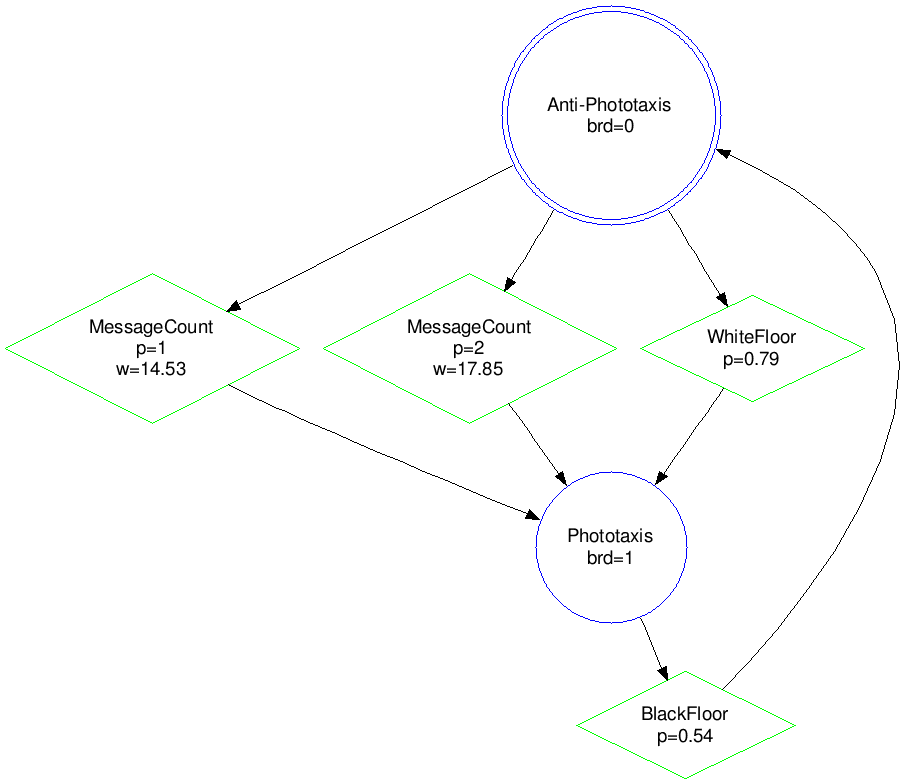
|
AutoMoDe-Chocolate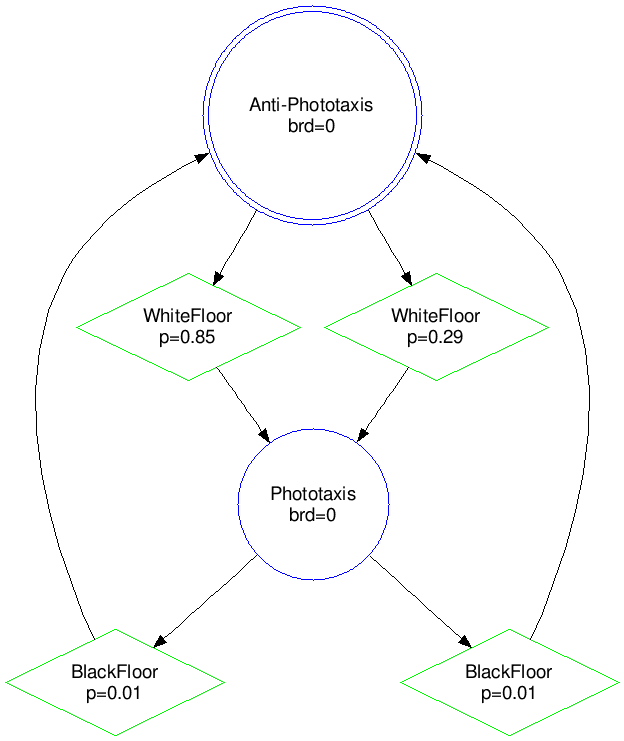
|
The controllers of all experimental runs are available for