SCA
LCN
SPC
CFA
AAC
Gianpiero
Francesca supervised by Mauro Birattari
January 2017
|
This page contains supplementary information for Chapter 5. Table of Contents |
The pseudocode of the objective functions is available for download: SCA, LCN, CFA, SPC, and AAC.
The descriptions of the tasks as they were produced by experts are available for download:
SCA,
LCN,
CFA,
SPC, and
AAC.
These documents were not originally meant to be
distributed. They are the document that were distributed to the
other experts as a description of the task to be solved. As
they were not intended to be distributed, the language is not
polished and the notation used to describe the objective
function might differ from the une adopted in the paper.
It is our understanding that a large share of the robot swarms
described in the domain literature have been programmed by PhD
students. We do not have general data on this but we can nonetheless
backup our statement with data extracted from the publication record of
IRIDIA, our research group in Brussels.
In the last five years (2010-2014) , IRIDIA has produced 78 peer-reviewed papers in swarm robotics:
* 4 papers do not describe a specific robot swarms. They are literature
reviews, and purely theoretical studies.
* 2 papers describe robot swarms that have been programmed by
post-doctoral researchers.
* 72 papers describe robot swarms that have been programmed by PhD
students.
We do not have formal data on other research groups but we expect that
in many other groups the legwork of programming the robots is
performed by PhD students. This is for sure the case in most of the
groups with which we cooperate. We argue therefore that PhD students
are the most appropriate subject for our study.
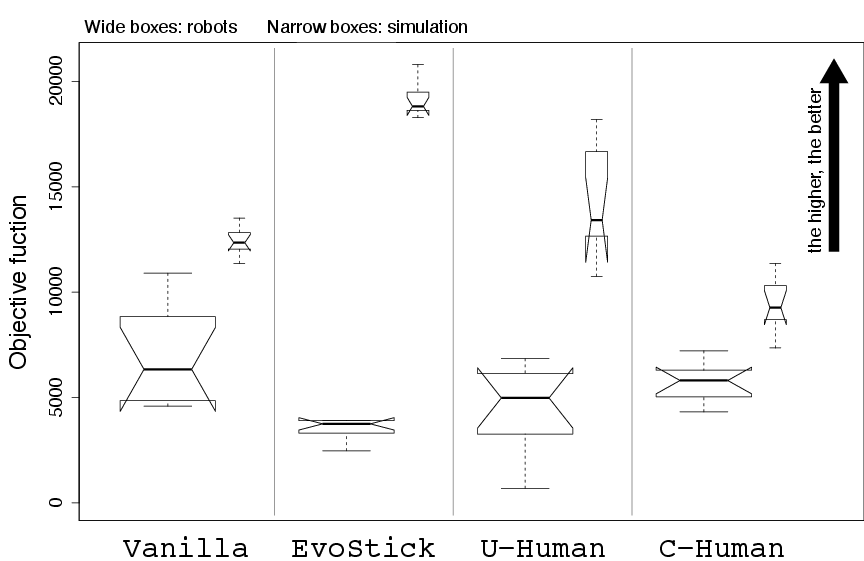
In the following we show, for each task, four videos, one for each method: AutoMoDe-Vanilla, EvoStick, U-Human and C-Human. These videos are randomly selected. The complete collection of videos is avilable for download: videos.tar.gz
In SCA (Shelter with Constrained Access), the goal of the swarm is to maximize the number of robots on an aggregation area. The aggregation area has a rectangular shape, is characterized by a white ground, and is surrounded by walls on three sides. The environment presents also a light source and two black regions that are positioned in front and aside the aggregation area, respectively.
In LCN (Largest Covering Network), the robots must maintain connection with each other, while trying to cover the largest possible area. We assume that i) two robots are connected when their distance is less than 0.25 m, and ii) each robot covers a circular area of radius 0.35 m.
In CFA (Coverage with Forbidden Areas), the goal of the swarm is to cover the entire arena except a few forbidden areas characterized by a black ground.
In SPC (Surface and Perimeter Coverage), the goal of the swarm is to cover the surface of a white square region and the perimeter of a black circular region.
In AAC (Aggregation with Ambient Cues), the goal of the swarm is to maximize the number of robots on an aggregation area represented by a black region. Besides the black region, the environment comprises a white region and a light source that is placed south of the black region.
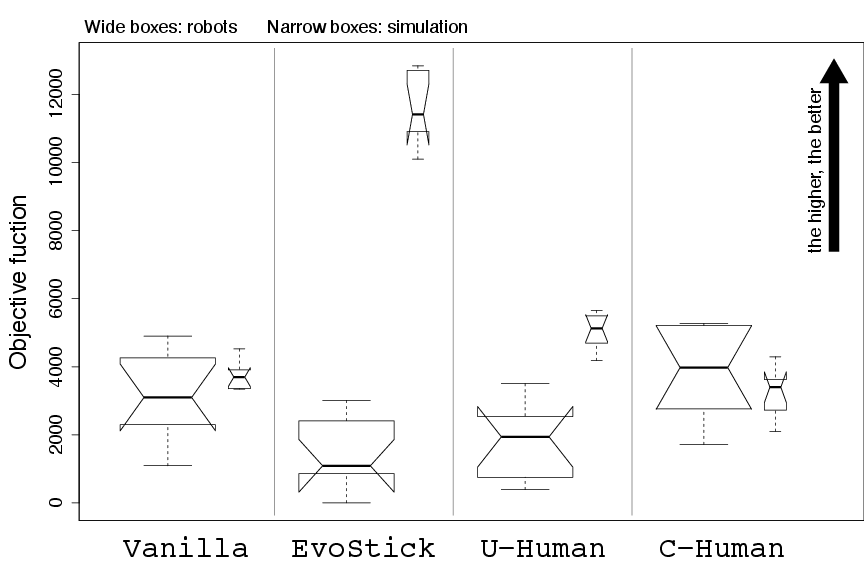
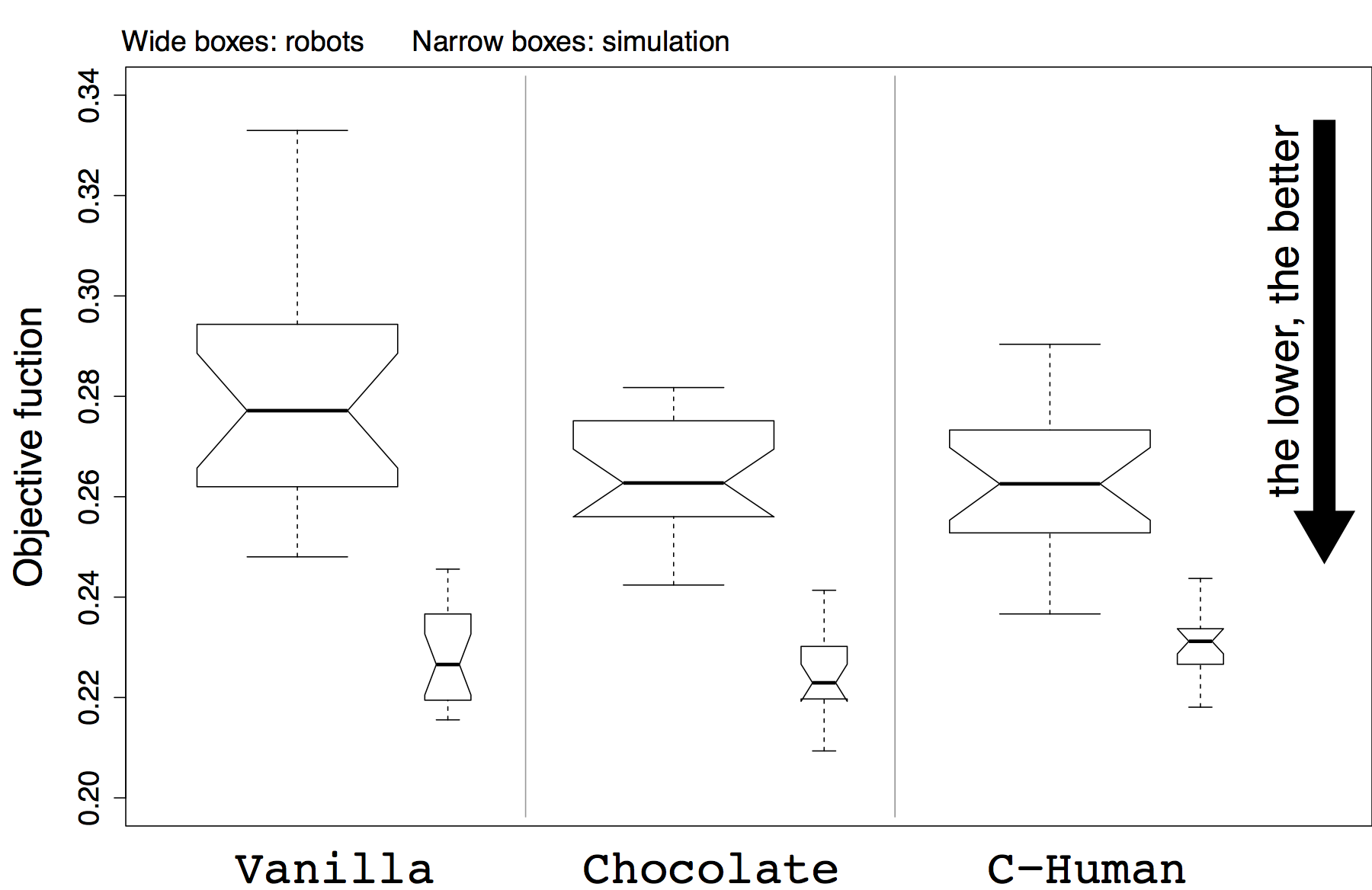
The data of all the experiments are available for download here. You can import them in R using read.table("results.txt",header=T).
If the notches of two boxes do not overlap, the difference between the corresponding central values is statistically significant
| SCA |
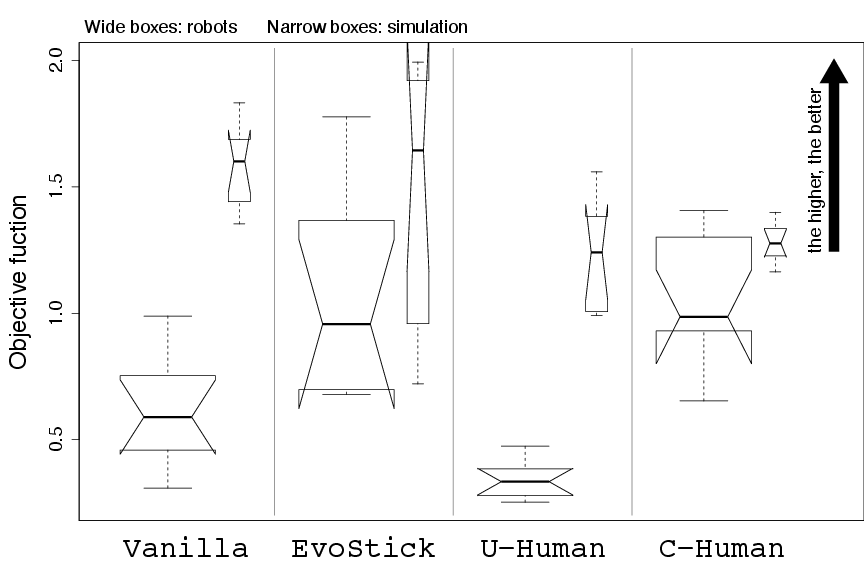
LCN |
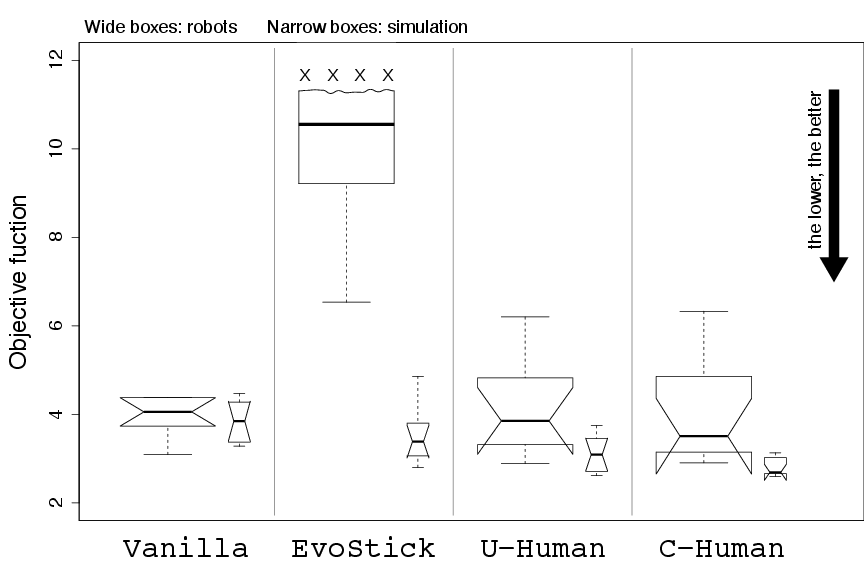
| SPC |
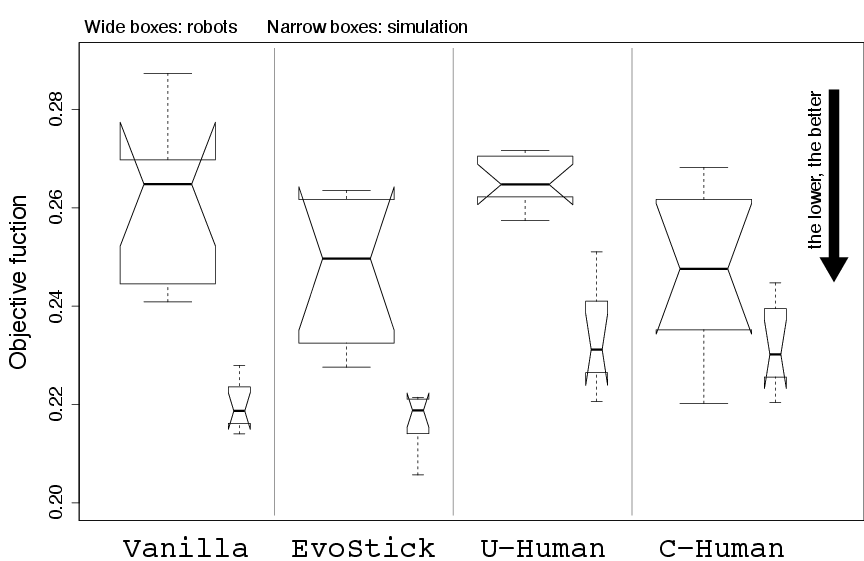
CFA |
| AAC |
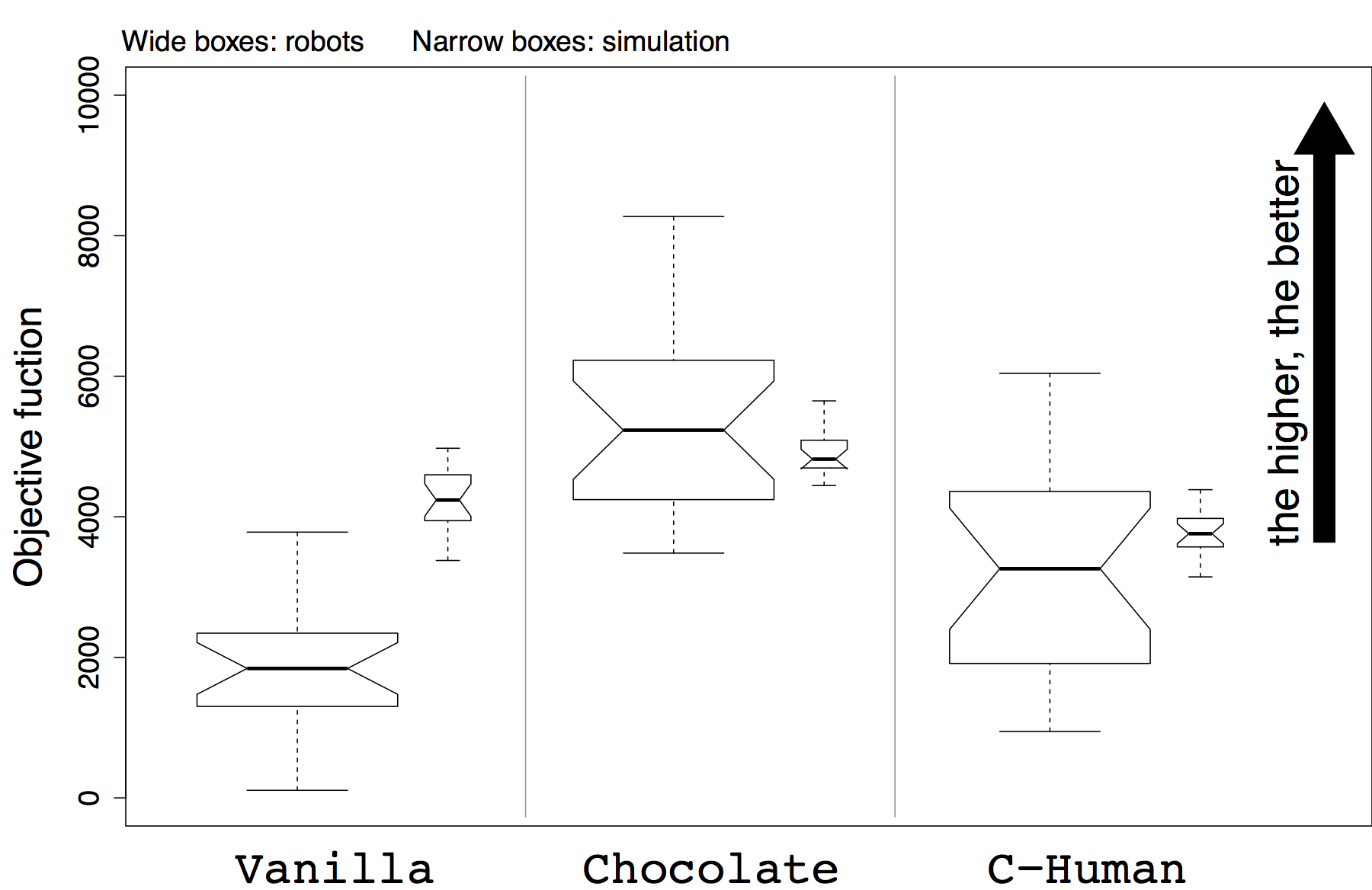
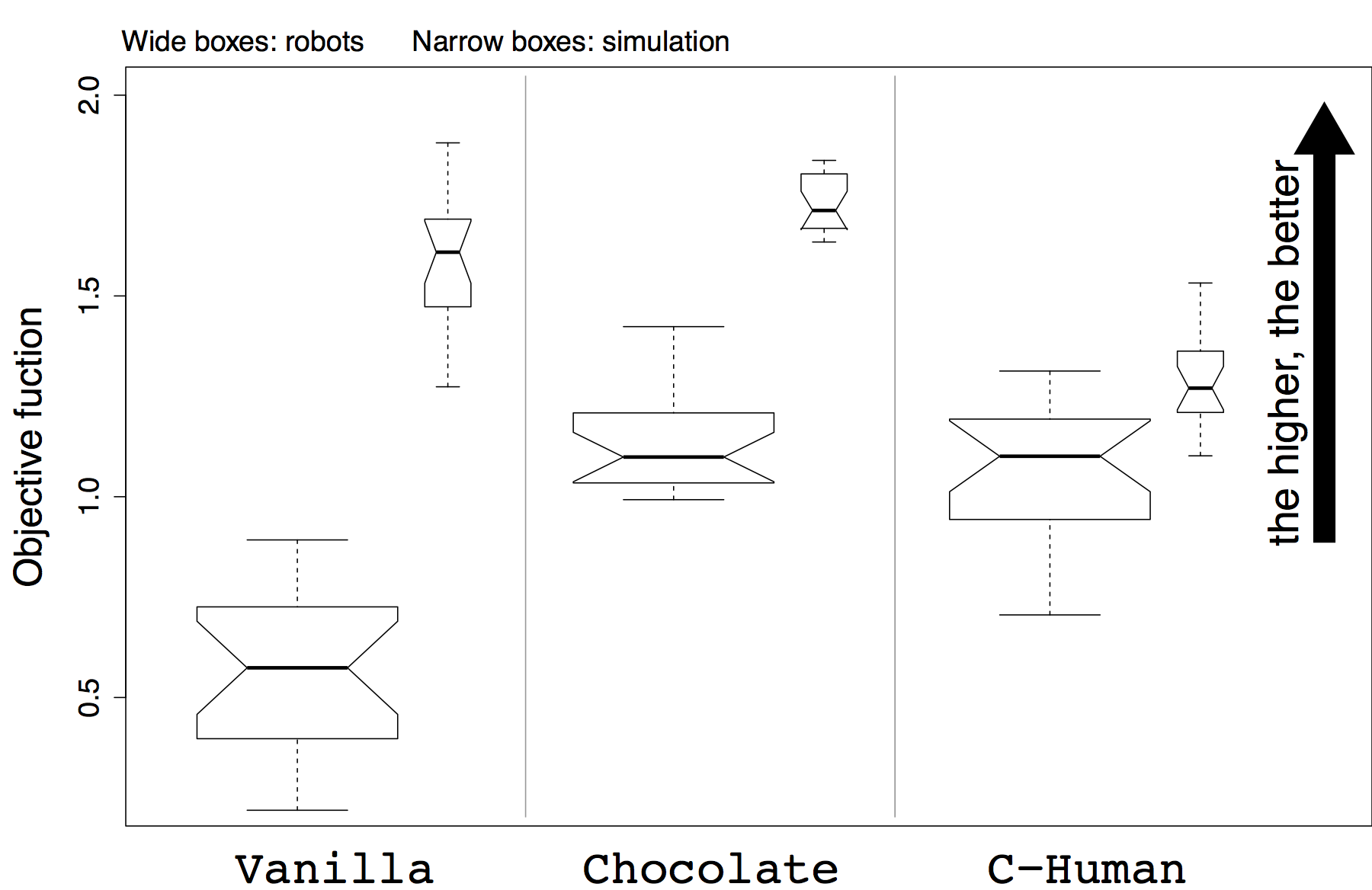
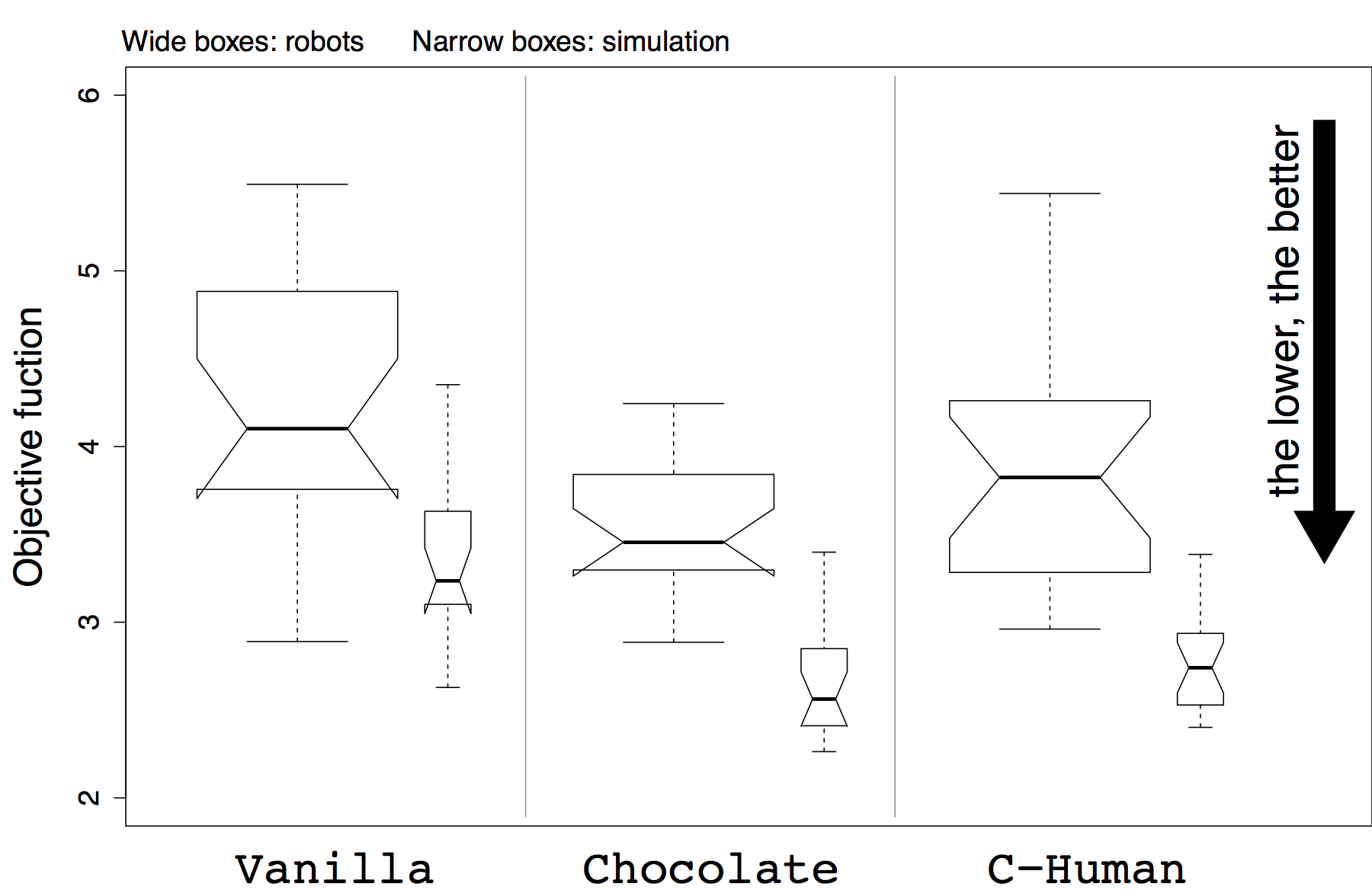
In the following we show, for each task, three videos, one for each method: AutoMoDe-Chocolate, AutoMoDe-Vanilla, and C-Human. These videos are randomly selected. The complete collection of videos is available for download: videos.tar.gz
In SCA (Shelter with Constrained Access), the goal of the swarm is to maximize the number of robots on an aggregation area. The aggregation area has a rectangular shape, is characterized by a white ground, and is surrounded by walls on three sides. The environment presents also a light source and two black regions that are positioned in front and aside the aggregation area, respectively.
In LCN (Largest Covering Network), the robots must maintain connection with each other, while trying to cover the largest possible area. We assume that i) two robots are connected when their distance is less than 0.25 m, and ii) each robot covers a circular area of radius 0.35 m.
In CFA (Coverage with Forbidden Areas), the goal of the swarm is to cover the entire arena except a few forbidden areas characterized by a black ground.
In SPC (Surface and Perimeter Coverage), the goal of the swarm is to cover the surface of a white square region and the perimeter of a black circular region.
In AAC (Aggregation with Ambient Cues), the goal of the swarm is to maximize the number of robots on an aggregation area represented by a black region. Besides the black region, the environment comprises a white region and a light source that is placed south of the black region.
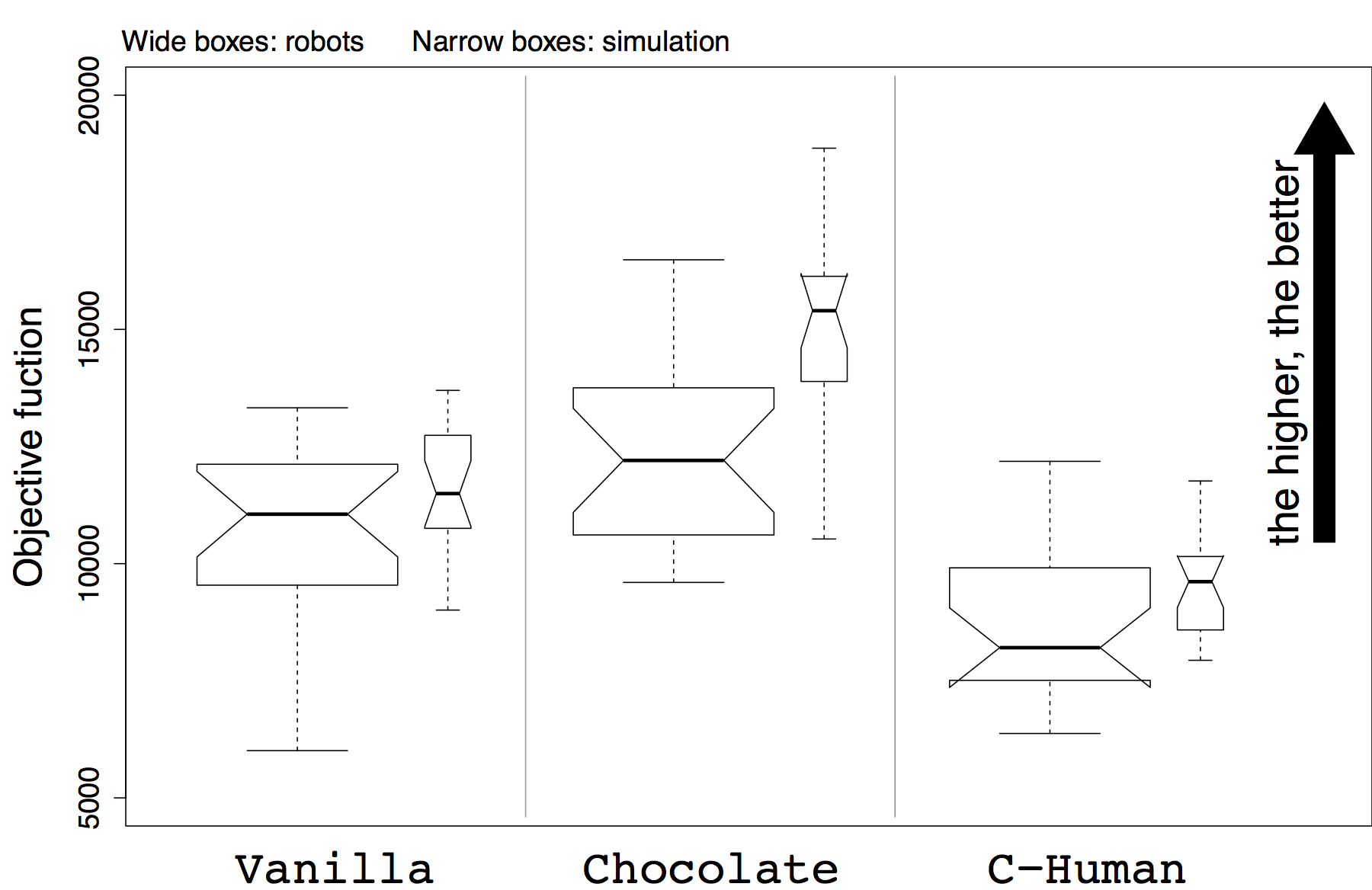
The data of all the experiments are available for download here. You can import them in R using read.table("results.txt",header=T).
If the notches of two boxes do not overlap, the difference between the corresponding central values is statistically significant
 SCA |
 LCN |
 SPC |
 CFA |
 AAC |