Supplementary material for the technical report:
Grippable objects for the foot-bot
by Arne Brutschy, Giovanni Pini, and Antal Decugnière
Last change: March 12th, 2012
|
Published in the IRIDIA Technical Report Series, number TR/IRIDIA/2012-001
Table of Contents |
Abstract
This page provides technical information, CAD software files and multimedia for the foot-bot
grippable objects designed by Arne Brutschy, Giovanni Pini, and Antal Decugnière.
The foot-bot is a wheeled robot designed during the
Swarmanoid project. While the robot features a gripper
to connect to other robots, it depends on a special grippable ring for attachment. The objects
presented here, and more specifically in the technical report referenced above, feature such a
grippable ring. Thus, they can be gripped and carried or dragged by the foot-bots. This allows
the experimenter to use the foot-bot in a multitude of experiments that were not possible
before the creation of the objects (e.g., foraging).
The objects have a customizable base height, which basically results in two versions:
- Objects with a long base for indirect transfer, that is, objects that can be deposited anywhere on the ground and picked up again by a robot
- Objects with a short base for direct transfer, that is, objects can only be transferred directly from one robot to the other
See pictures below for examples of the two types of objects.

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License.
Keywords: Swarm robotics, foraging, self-organization, Swarmanoid, foot-bot
CAD files
 Figure 1a: A single object consists of two identical rings with the dimensions indicated in the
drawing (all measures given in millimeters)
Figure 1a: A single object consists of two identical rings with the dimensions indicated in the
drawing (all measures given in millimeters)
Each object consists of three main parts: two identical rings (see Figure 1a for a technical drawing)
and a base of customizable height. The base can be customized so that it can be used for experiments
with either direct or indirect transfer of objects between robots.
The following CAD files can be used for reproducing the rings of the objects:
Download CAD files (formats DXF, IGS, STL, STP)
The material used
is machined/milled Polyoxymethylene Copolymer
(POM-C, download datasheet, in german)
for about 10 € per ring (two are required for one object). POM offers a good compromise
of price, weight and durability. Other materials have not been tested. Thus, we cannot guarantee that
other materials will work.
Figure 1b shows a rendered image of a single ring.
 Figure 1b: Rendered image of a single ring
Figure 1b: Rendered image of a single ring
The base of the object is standard PVC pipe with a diameter of 80mm. It can be found in any hardware store and is easy to cut. The customizable height of the object's base allows for using the objects for experiment with either direct or indirect transfer. In case of direct transfer, objects have to be seated on a socket so that the foot-bots can pick them up. Figure 1c shows the two base heights tested. Figure 1d gives an isometric view on an assembled object (long base, suitable for indirect transfer).
 Figure 1c: Base height for indirect transfer (left) and direct transfer (right)
Figure 1c: Base height for indirect transfer (left) and direct transfer (right)
 Figure 1d: Isometric view on an assembled object (long base,
suitable for indirect transfer)
Figure 1d: Isometric view on an assembled object (long base,
suitable for indirect transfer)
Photos
The following photos are also included in the technical report and are just repeated here for consistency. A high-resolution version of these and other photos are available for download: tar.gz with jpegs (124 MB).
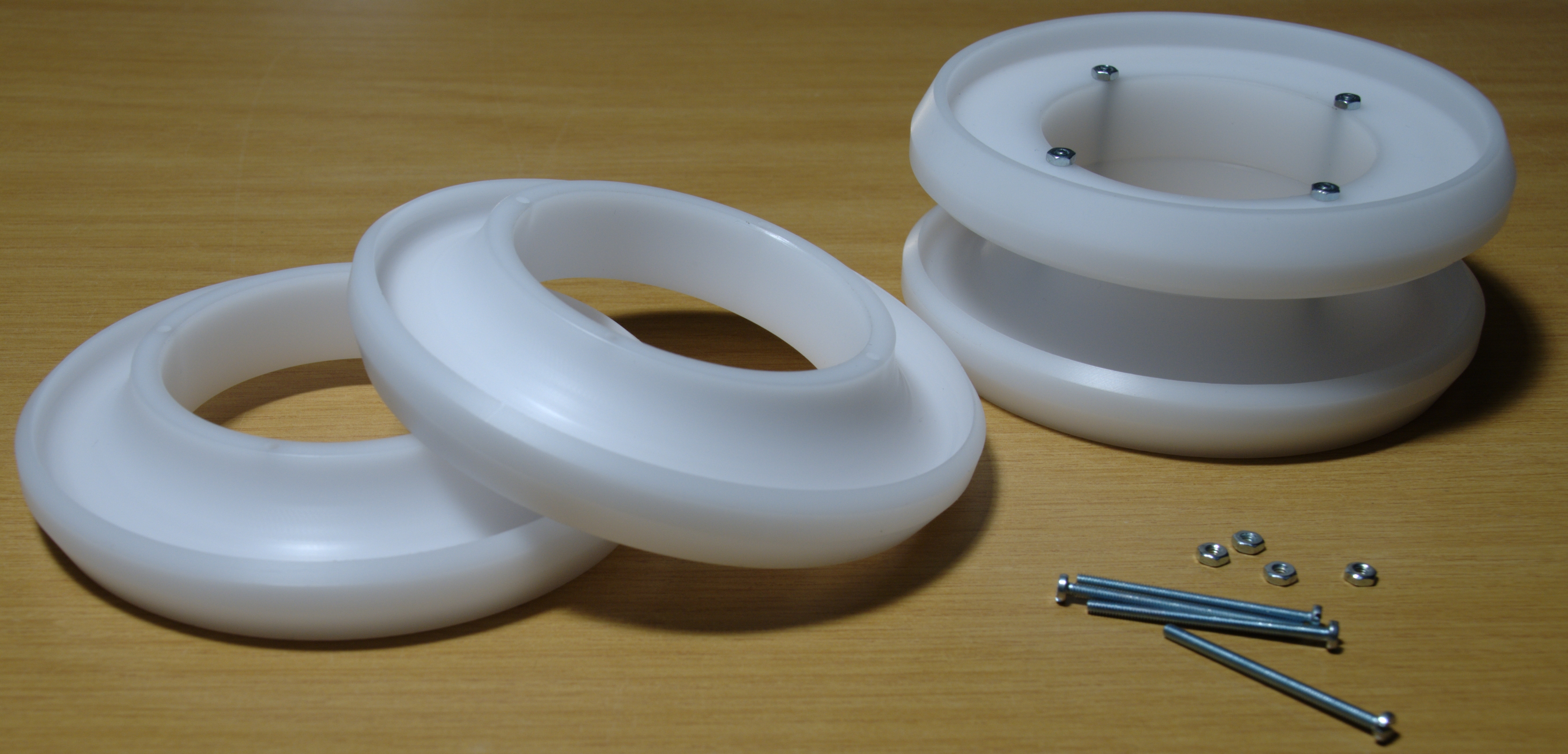 Figure 2a: Object parts (two rings, four M2 screws with nuts) and an assembled ring
Figure 2a: Object parts (two rings, four M2 screws with nuts) and an assembled ring
 Figure 2b: Isometric view on an object (long version for indirect transfer, with red patch on
top used for recognition by the foot-bot)
Figure 2b: Isometric view on an object (long version for indirect transfer, with red patch on
top used for recognition by the foot-bot)
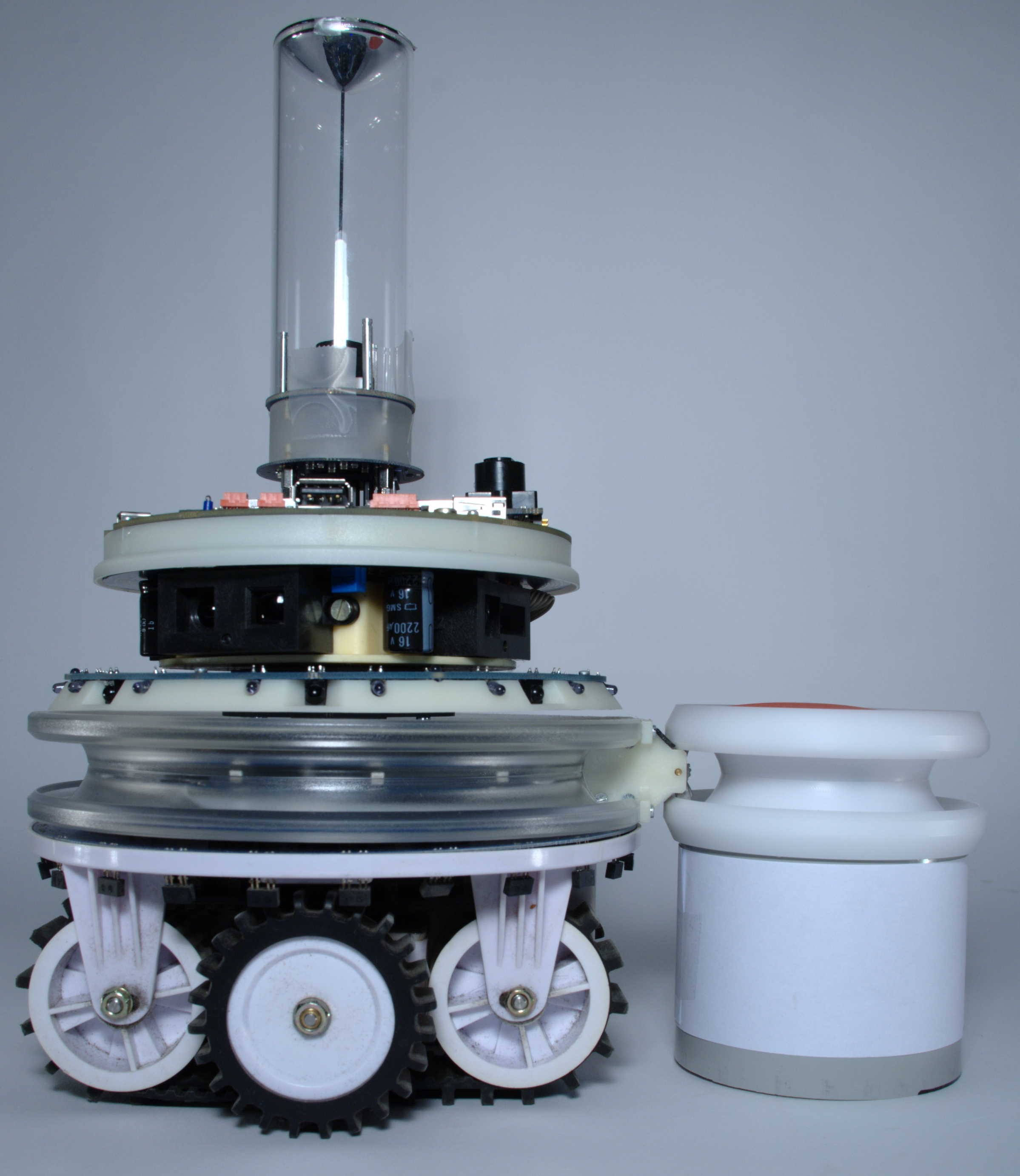 Figure 2c: A foot-bot gripping an object (long version for indirect transfer)
Figure 2c: A foot-bot gripping an object (long version for indirect transfer)
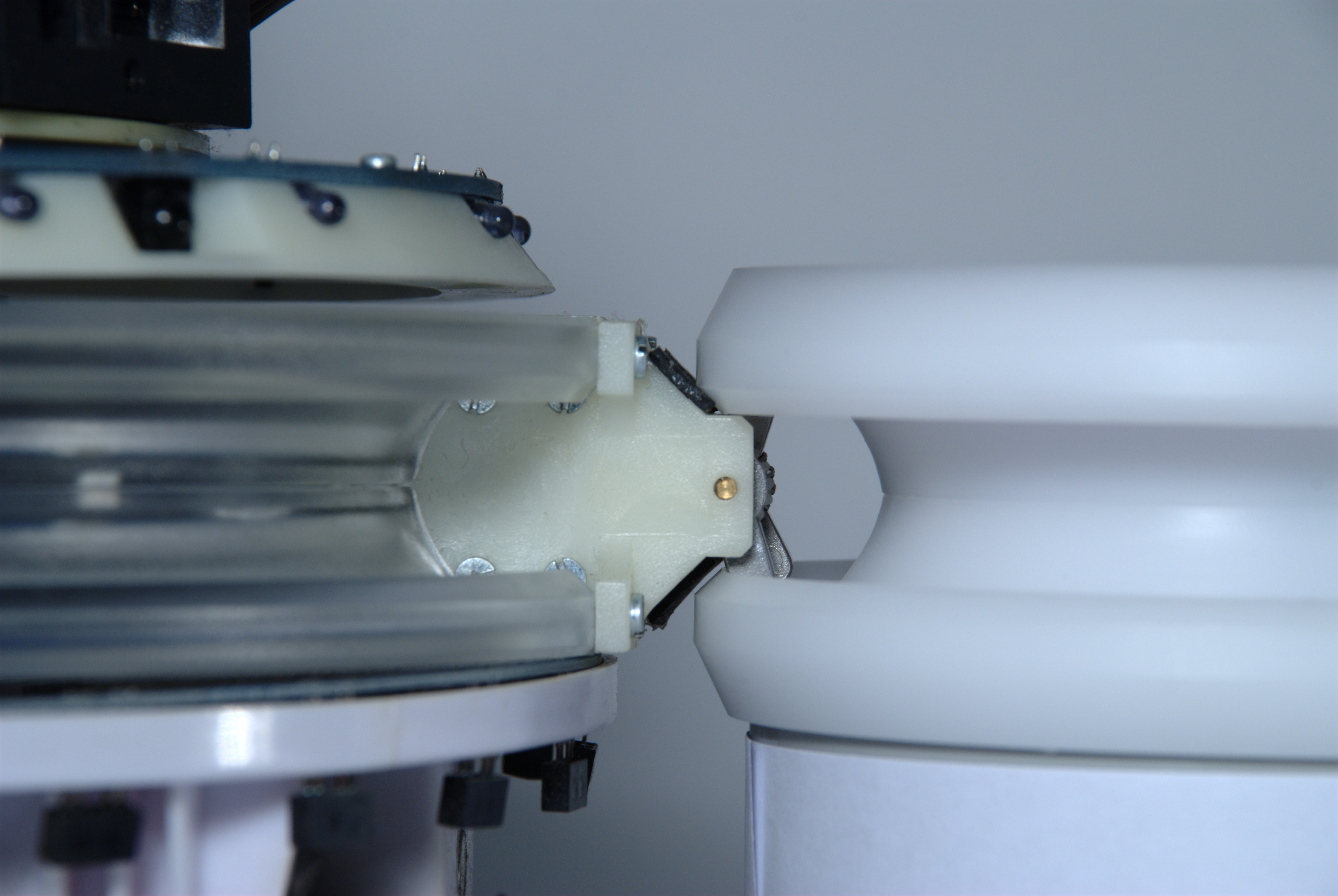 Figure 2d: Closeup on the object ring and the foot-bot's gripper
Figure 2d: Closeup on the object ring and the foot-bot's gripper
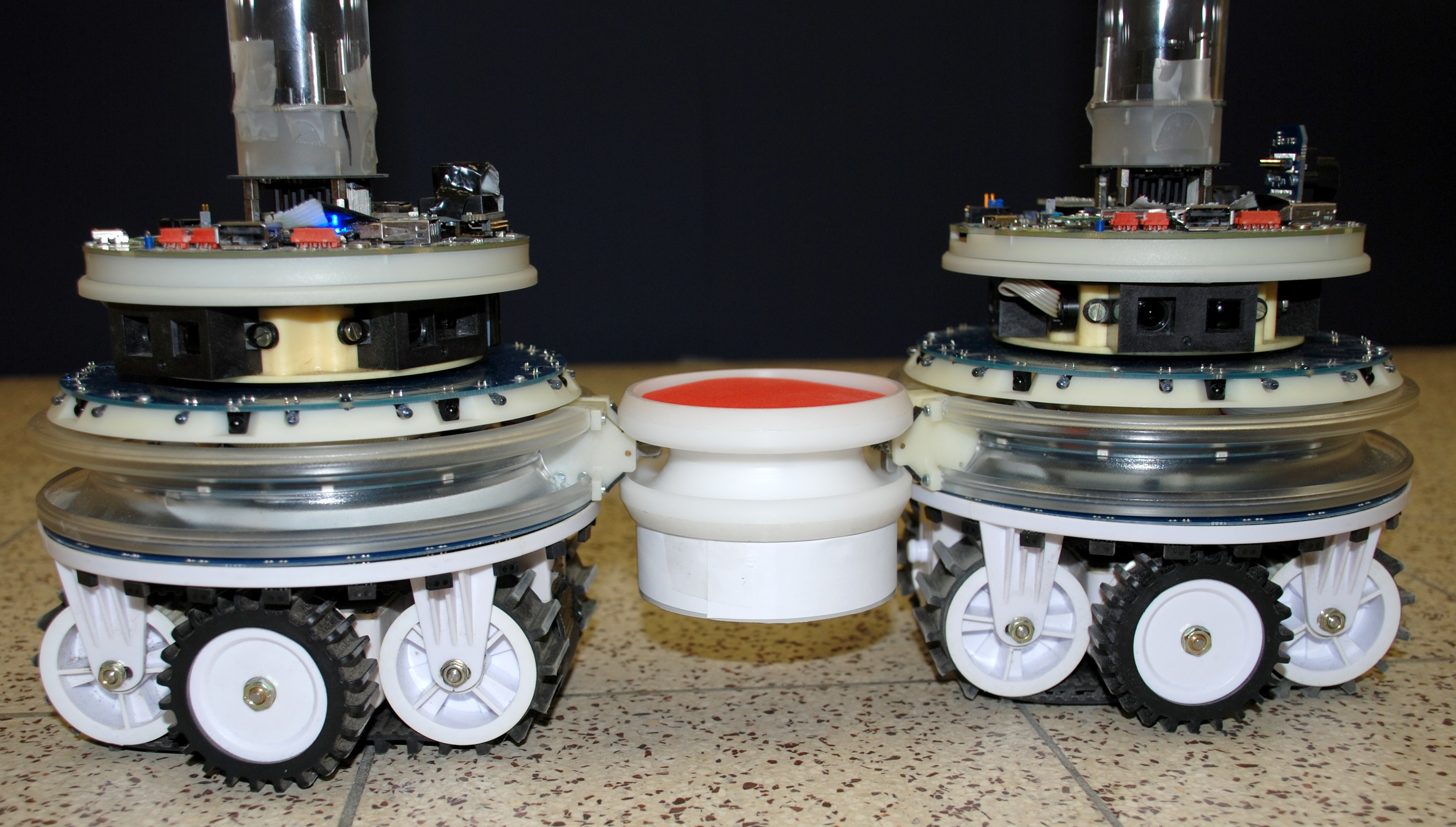 Figure 2e: Handover of an object (short version for direct transfer) between two foot-bots
Figure 2e: Handover of an object (short version for direct transfer) between two foot-bots
Videos
Foot-bot gripping object - side view
Download this video
- format ogv, low quality, no sound (4.7 MB)
- format mp4, good quality, no sound (23 MB)
- format mp4/ac3, high definition, with sound (73 MB)
Foot-bot gripping object - top view
Download this video
- format ogv, low quality, no sound (5.3 MB)
- format mp4, good quality, no sound (21 MB)
- format mp4/ac3, high definition, with sound (66 MB)
Foot-bot gripping object - closeup on gripper
Download this video
- format ogv, low quality, no sound (3.3 MB)
- format mp4, good quality, no sound (11 MB)
- format mp4/ac3, high definition, with sound (35 MB)
Foot-bot gripping object for direct transfer from socket
Download this video
- format ogv, low quality, no sound (3.3 MB)
- format mp4, good quality, no sound (18 MB)
- format mp4/ac3, high definition, with sound (58 MB)
Object handover - side view
Download this video
- format ogv, low quality, no sound (4.2 MB)
- format mp4, good quality, no sound (24 MB)
- format mp4/ac3, high definition, with sound (74 MB)
Object handover - top view
Download this video
- format ogv, low quality, no sound (6 MB)
- format mp4, good quality, no sound (26 MB)
- format mp4/ac3, high definition, with sound (81 MB)
Handover of object for direct transfer - side view
Download this video
- format ogv, low quality, no sound (5 MB)
- format mp4, good quality, no sound (27 MB)
- format mp4/ac3, high definition, with sound (85 MB)