Self-Organized Flocking with a Heterogeneous Mobile Robot Swarm
Abstract
In this paper, we study self-organized flocking in a swarm of
behaviorally heterogeneous mobile robots: aligning and non-aligning robots. Aligning robots are capable of agreeing on
a common heading direction with other neighboring aligning
robots. Conversely, non-aligning robots lack this capability.
Studying this type of heterogeneity in self-organized flocking is important as it can support the design of a swarm with
minimal hardware requirements. Through systematic simulations, we show that a heterogeneous group of aligning and
non-aligning robots can achieve good performance in flocking behavior. We further show that the performance is affected not only by the proportion of aligning robots, but also
by the way they integrate information about their neighbors
and also by heterogeneity in the way robots move.
Keywords:Flocking, Swarm Robotics, Self-Organization, Heterogeneity.
Heterogeneous flocking performance
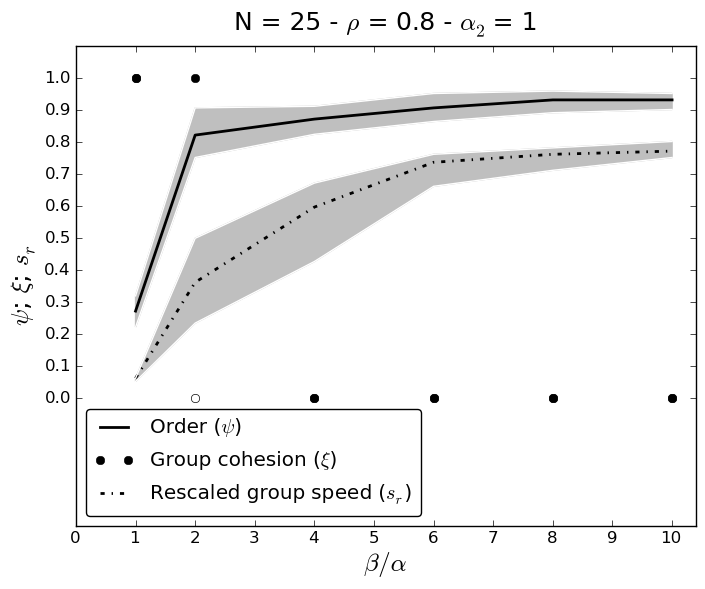
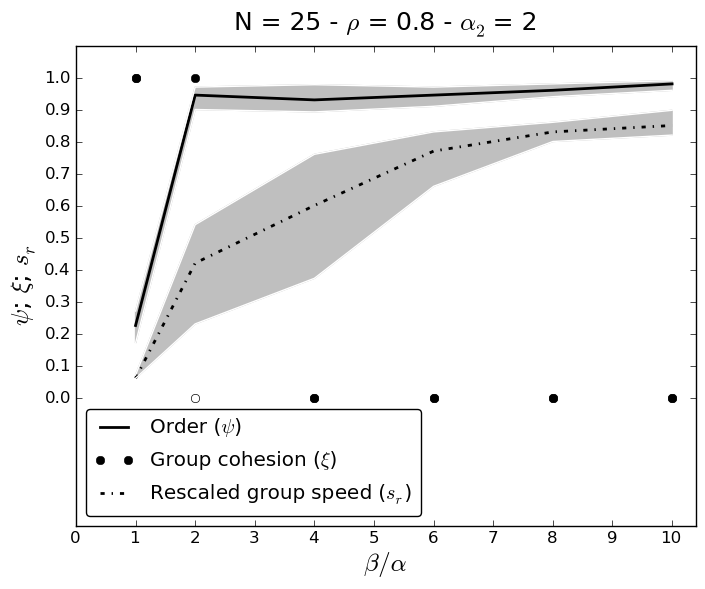
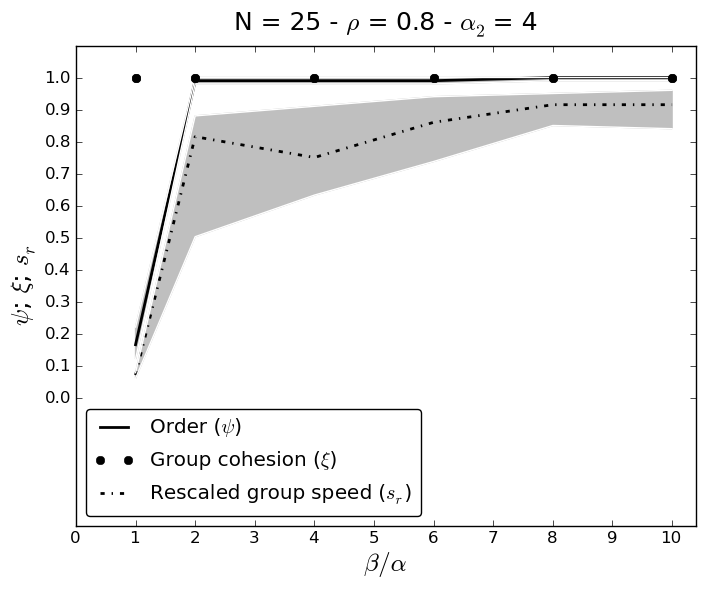
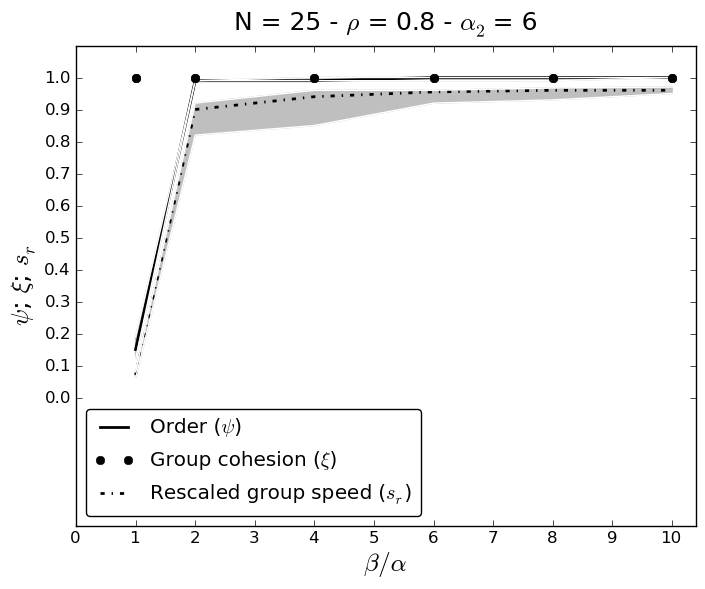
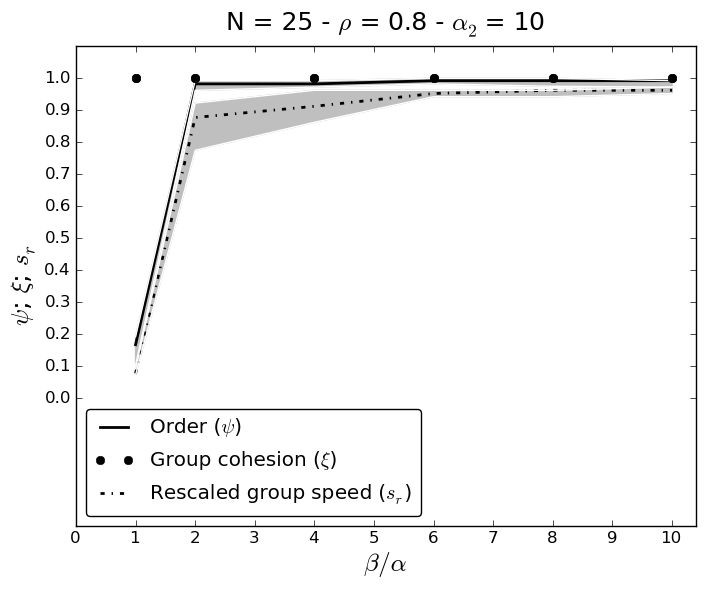
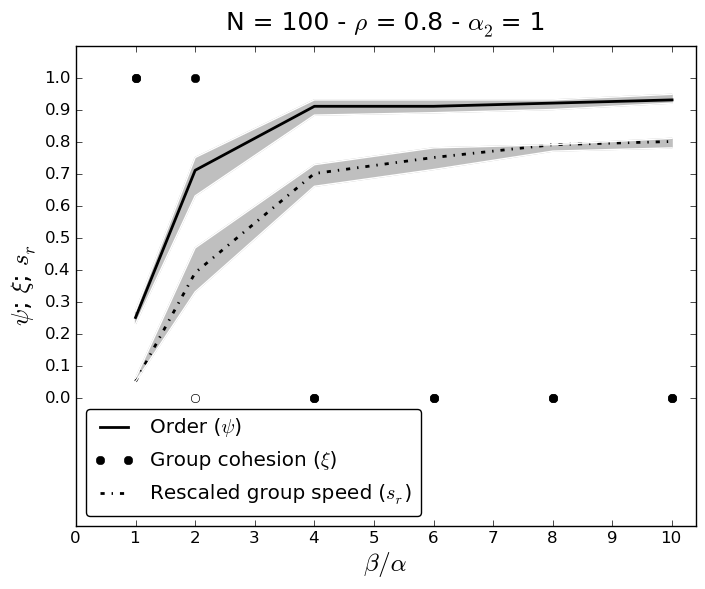
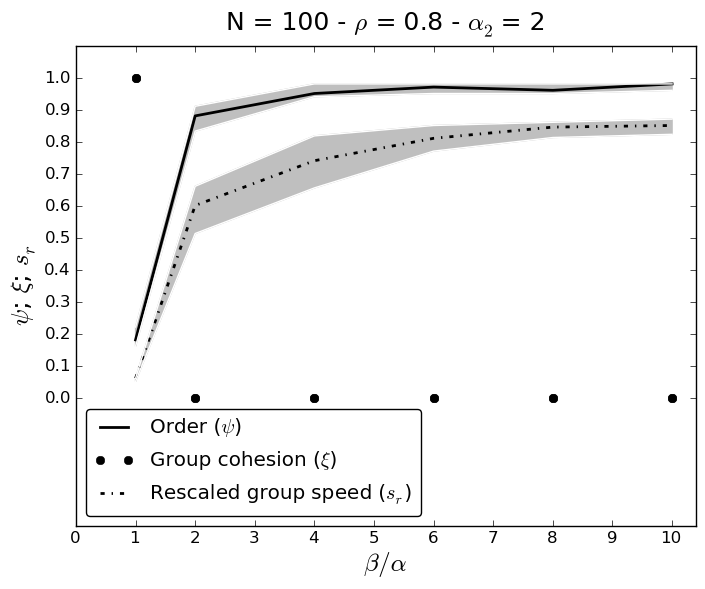
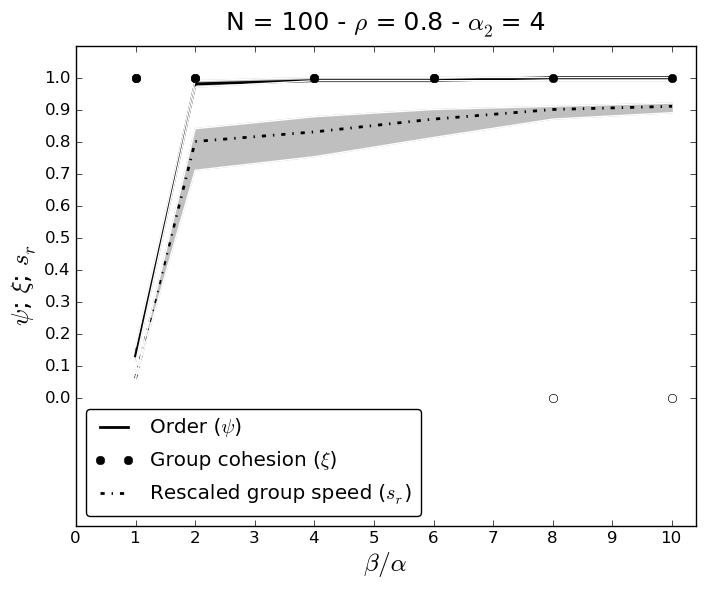
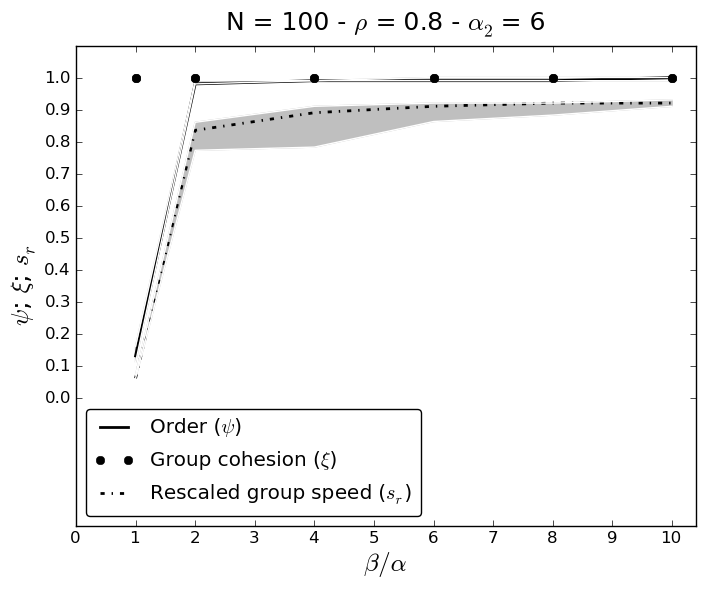
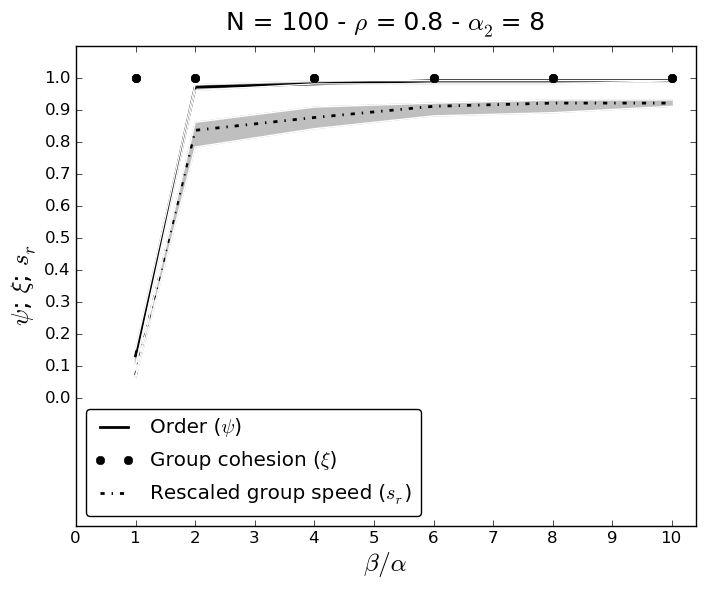
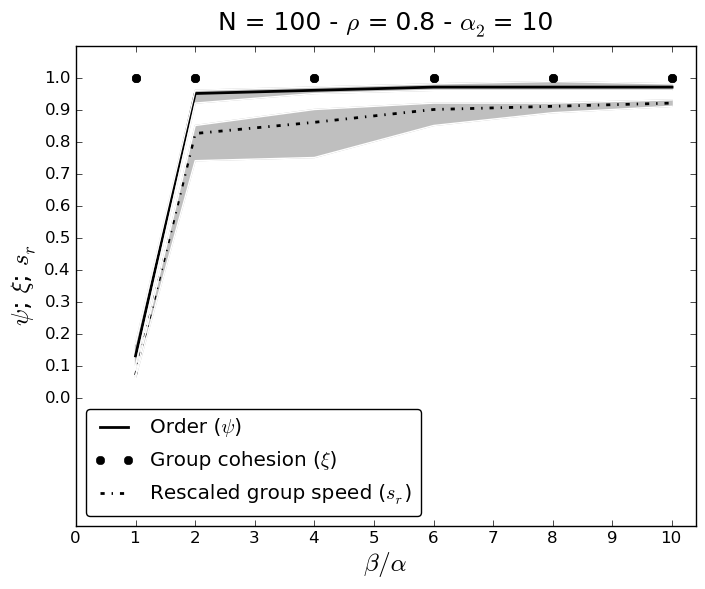
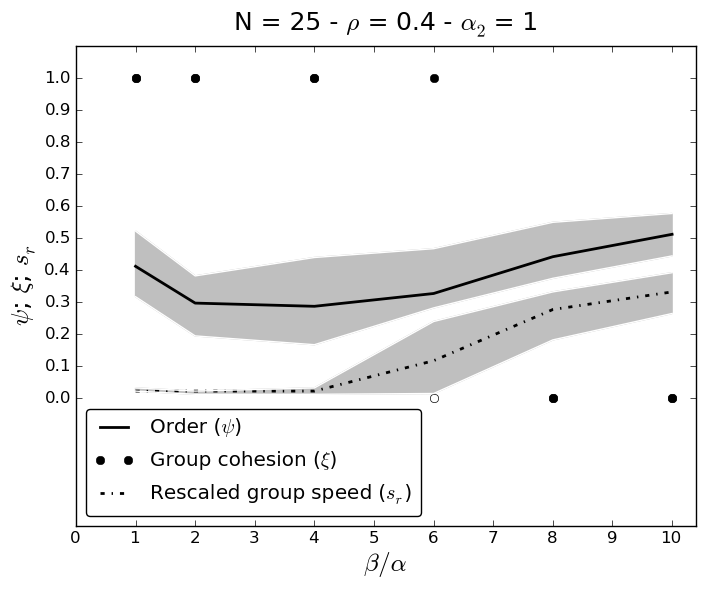
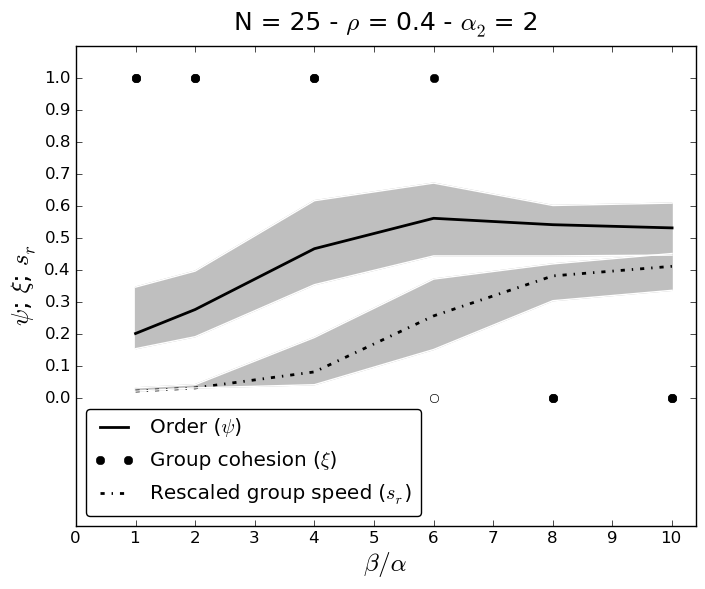
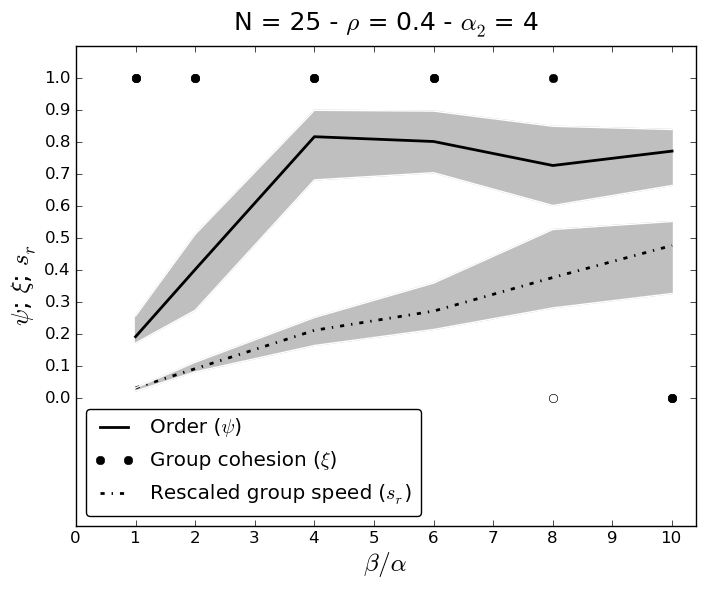
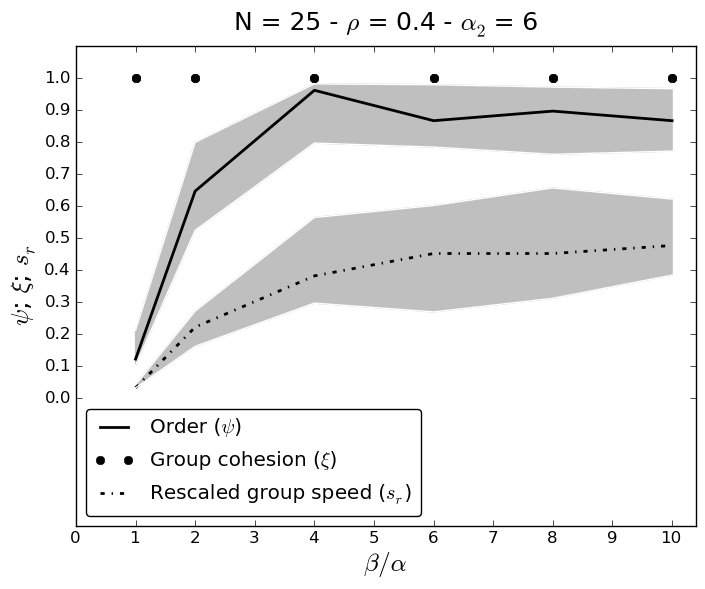
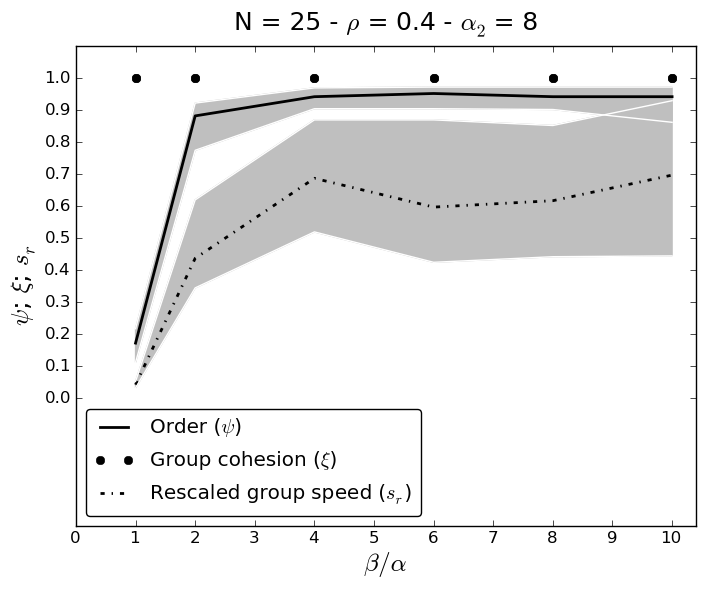
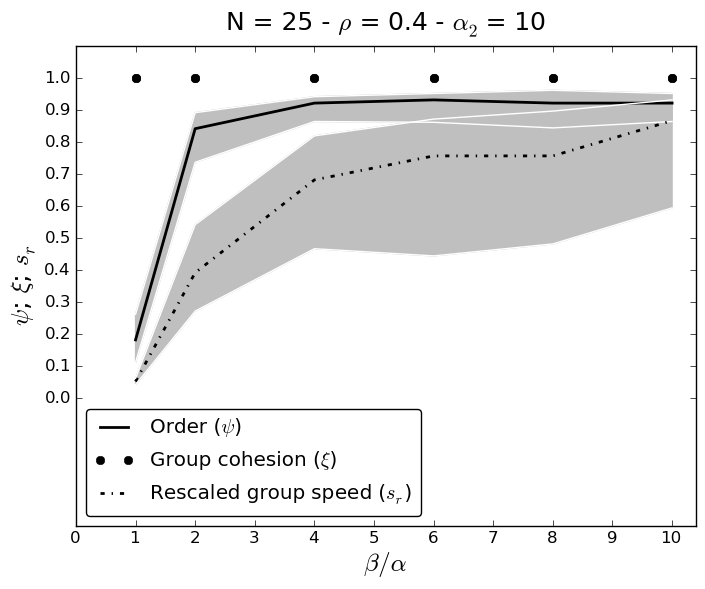
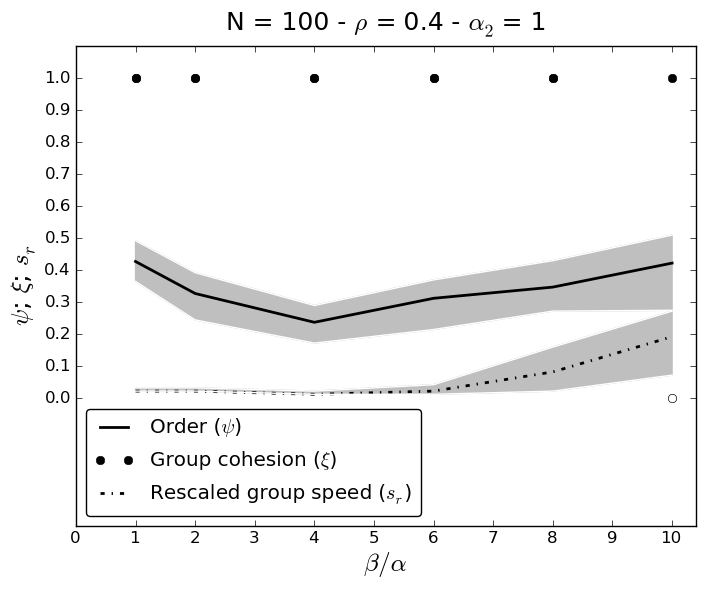
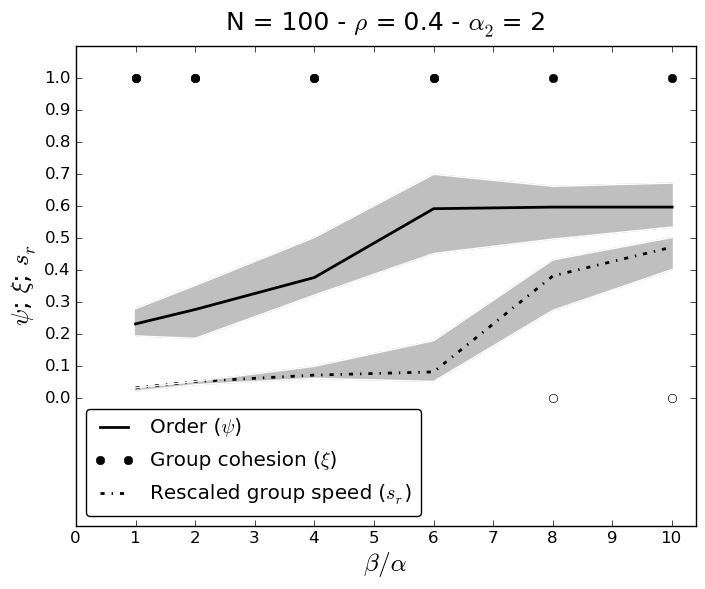
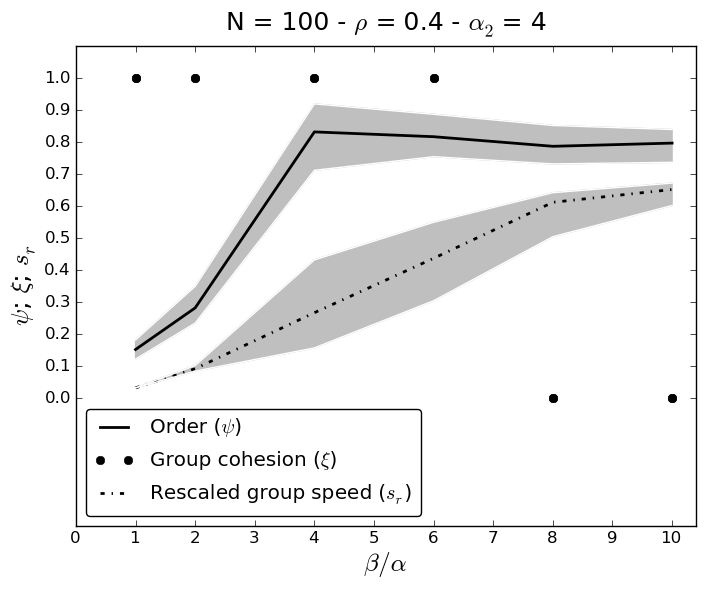
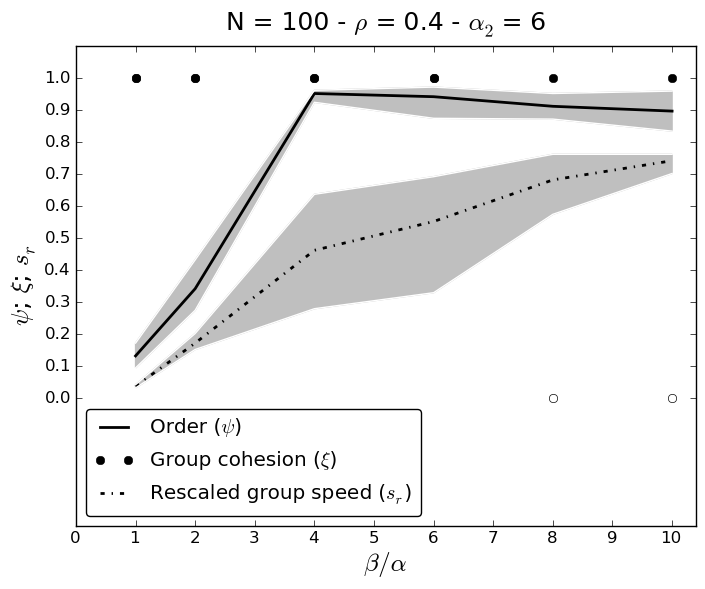
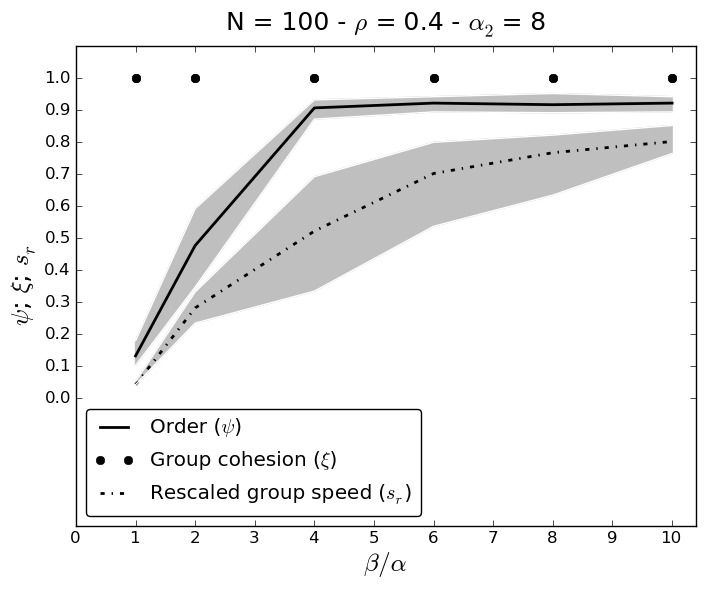
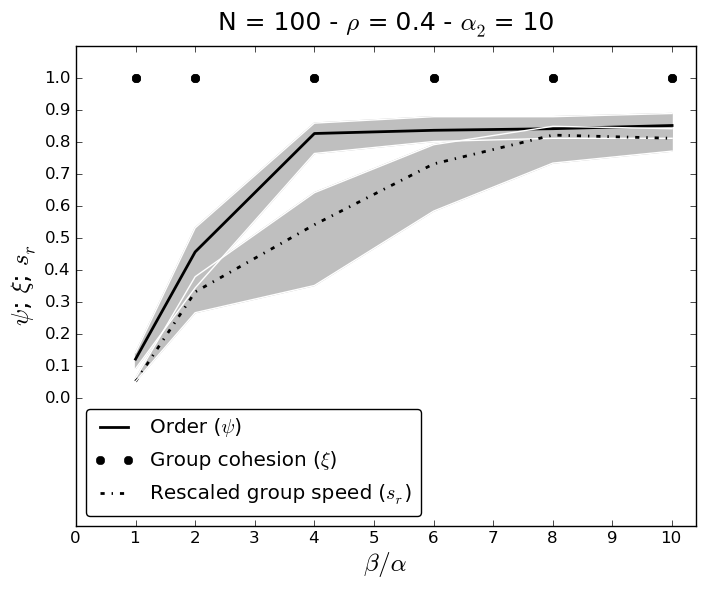
The following plots display the flocking performance for the experiments with CMC-VMC as motion control rule combination.
In this case, aligning robot emply CMC, while non-aligning robots employ VMC. Flocking performance is given according to
the three metrics descibed in the paper: Order, Group cohesion, Rescaled group speed.
Results are presented by ratio of aligning robots, then by swarm size, and finally by value of the parameter α2.
CMC-VMC