|
Video
|
|
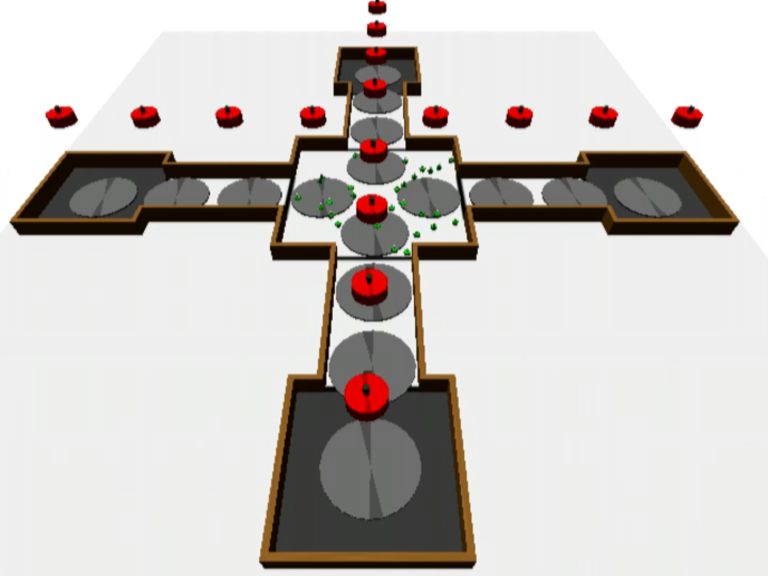
In this video, tasks are activated in sequence. An eye-bot
requests 5 to 10 robots to execute the task it is
coordinating. The request is relayed to the closest eye-bot in
the recruitment area, which takes care of recruiting the needed
foot-bots. When the team is formed, the recruiting eye-bot
delivers it to the requesting eye-bot. After the execution of
the task, the foot-bots are returned to the recruitment area. At
this point, another eye-bot requests foot-bots for its task (9
to 13) and also in this case recruitment, delivery and return
are successful. This is footage from one of the experimental
trials described in our paper.
|
|
|
|
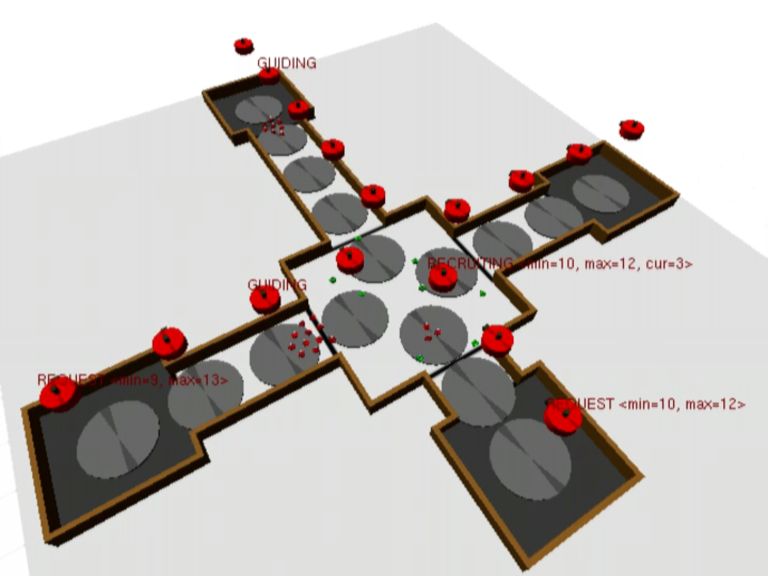
In this video, we show that the recruitment system is successful
also when dealing with multiple parallel and asynchronous
requests. Initially, two eye-bots request foot-bots at the same
time. One eye-bot requests 5 to 10 foot-bots, the other 7 to
13. The requests are relayed to two eye-bots in the recruitment
area. While the two foot-bot teams are formed in parallel, a
third eye-bot requests 10 to 12 foot-bots. This new request
triggers the redistribution of the already recruited
foot-bots. Eventually, one team is formed and, when the team
leaves the recruitment area, further redistribution takes place,
thus allowing another group to be formed and sent to task
execution. The third team is formed when the first is returned
to the recruitment area. This is footage from one of the
experimental trials described in our paper.
|
|
|
|
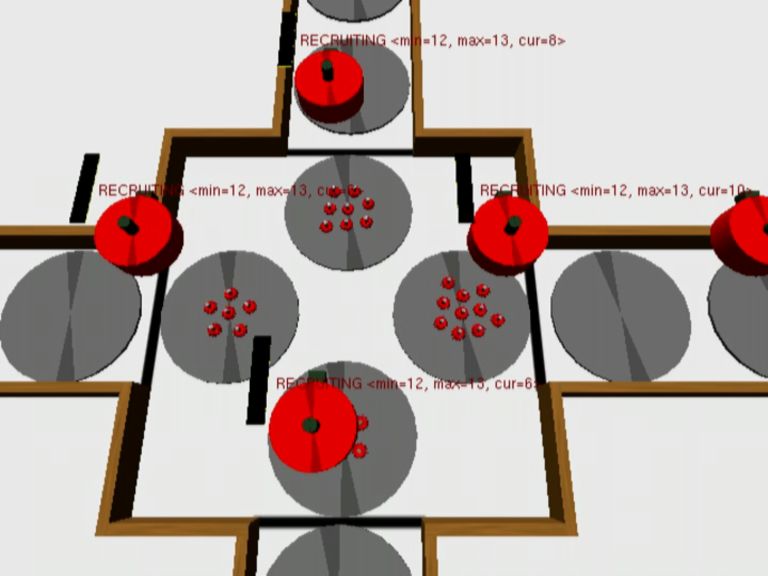
In this video, we show how deadlocks are solved in the
system. There are 30 available foot-bots in the recruitment area
and four simultaneous recruitment requests (min=12, max=13) are
formulated at the same time. The eye-bots form their teams in
parallel, but soon a deadlock happens -- no eye-bot can satisfy
the minimum requested quota. When eye-bots detect convergence to
a quota which is less than the minimum, it has a small
probability to spike the leaving probability sent to the
foot-bots. This simple mechanism is sufficient to allow the
system to overcome the deadlock and continue functioning. This
is footage from one of the experimental trials described in our
paper.
|
|