November 2008
| Table of Contents |
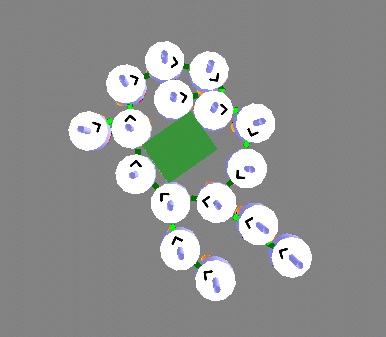
We examine the ability of a swarm robotic system to transport
cooperatively objects of different shapes and sizes. We simulate a
group of autonomous mobile robots that can physically connect to each
other and to the transported object. Controllers - artificial neural
networks - are synthesised by an evolutionary algorithm. They are
trained to let the robots self-assemble, that is, organise into
collective physical structures, and transport the object towards a
target location. We quantify the performance and the behaviour of the
group. We show that the group can cope fairly well with objects of
different geometries as well as with sudden changes in the target
location. Moreover, we show that larger groups, which are made of up
to 16 robots, make possible the transport of heavier objects. Finally,
we discuss the limitations of the system in terms of task complexity,
scalability, and fault tolerance, and point out potential directions
for future research.
Keywords:
artificial neural networks;
bio-inspired computation;
collective structures;
cooperation;
cooperative transport;
evolutionary robotics;
foraging;
group transport;
modular robots;
object manipulation;
reconfigurable robots;
self-assembling robots;
self-assembly;
swarm intelligence;
swarm robotics.
| Links | |
|---|---|
Website |
Roderich Groß |
Website |
Marco Dorigo |
PDF |
Paper is available here |