|
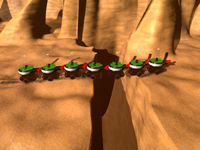
We propose SWARMORPH: a distributed morphology generation mechanism for
autonomous self-assembling mobile robots. Self-organized growth of
morphological structures emerges through the repeated application of local
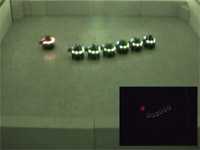
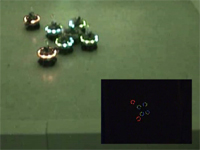
morphology extension rules. We present details of the directional
self-assembly mechanism that provides control over the orientation of
inter-robot connections. We conduct real world experiments to validate the
low-level directional self-assembly mechanism and the growth of
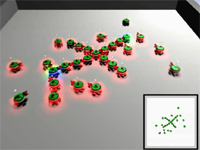
morphologies. We demonstrate the scalability of the approach with large
numbers of robots in simulation-based experiments.
|

|