|
Submitted to International Journal of Advanced Robotic Systems
Table of Contents |

by Álvaro Gutiérrez Martín, Elio Tuci and Alexandre Campo
July 2008
|
|
We tested the best genotype obtained by artificial evolution in groups of 3, 4, and 6 physical robots across 30 repeated experiments. We use a specific measure of polarisation to calculate the degree of alignment of all the robots. Polarisation P(G) of a group of robots G is defined using the angular nearest neighbour:
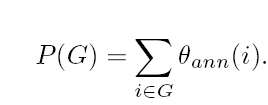
where θann(i) is the relative orientation of the angular nearest neighbour of the robot i. If all robots are aligned, then P(G) = 0. Conversely, if headings are evenly distributed, P(G) = 2π. If headings are random, i.e. drawn from a uniform distribution, then P(G) = π in average.
All the data collected on real experiments are in Data Section.
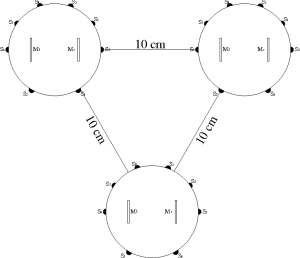
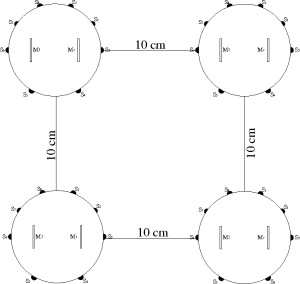
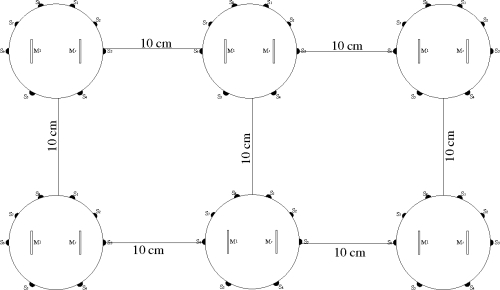
In this section we show the spatial arrangements of the e-pucks for the 3, 4 and 6 and robot experiments.
 |
 |
| |
|
 |
|
| |
|
Figure 1: Pictures showing the spatial configurations the robots are forming in the (a) three robots test; (b) four robots tests; (c) six robots tests; In these pictures the robots are depicted facing the same direction. However, the reader should bear in mind that, at the beginning of a post-evaluation trial, the robots are facing randomly chosen orientation.
All movies recorded can be found at Movies Section.