What is the Kilogrid?
The Kilogrid is a modular and scalable virtualization environment designed for the study of collective behaviors in swarm robotics using the Kilobot robot. The Kilogrid leverages on the infrared communication capabilities of the Kilobot robot to provide a reconfigurable environment whereby sensors and actuatators not present on the Kilbot can be virtualized. In addition, the Kilogrid allows researchers to automatically collect data during an experiment simplifying the design of collective behaviors and their analysis.


Virtual Sensors
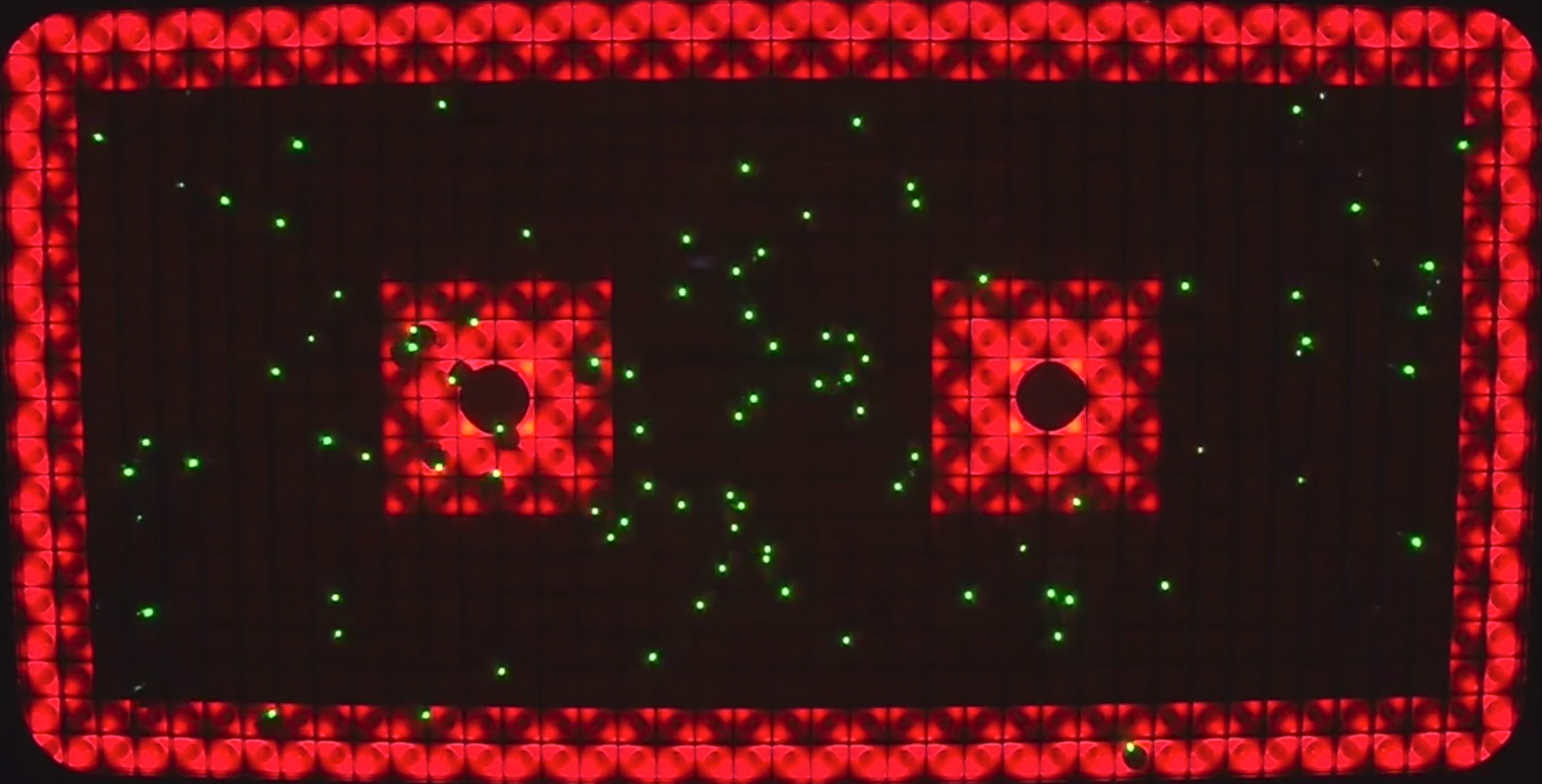
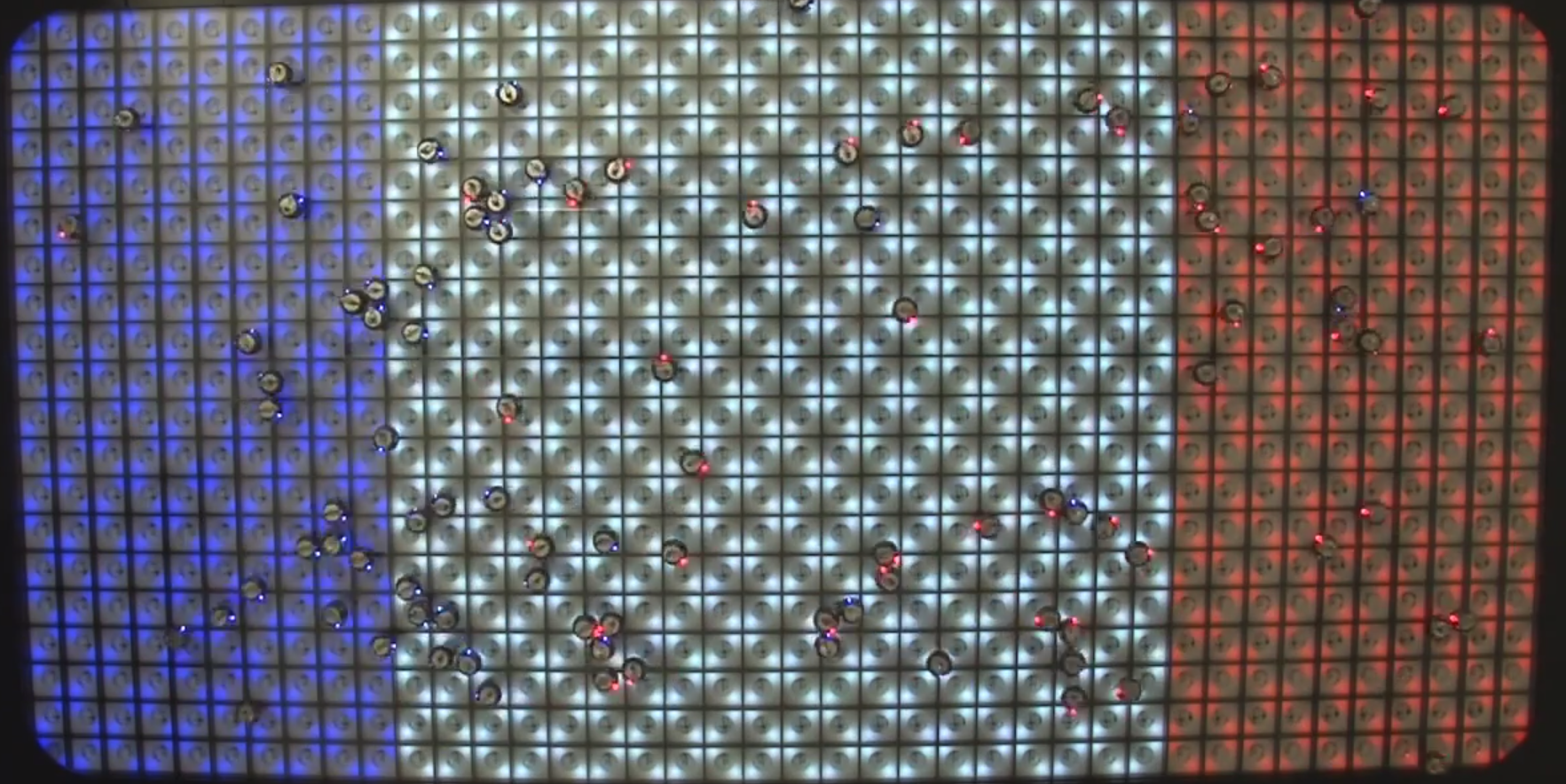
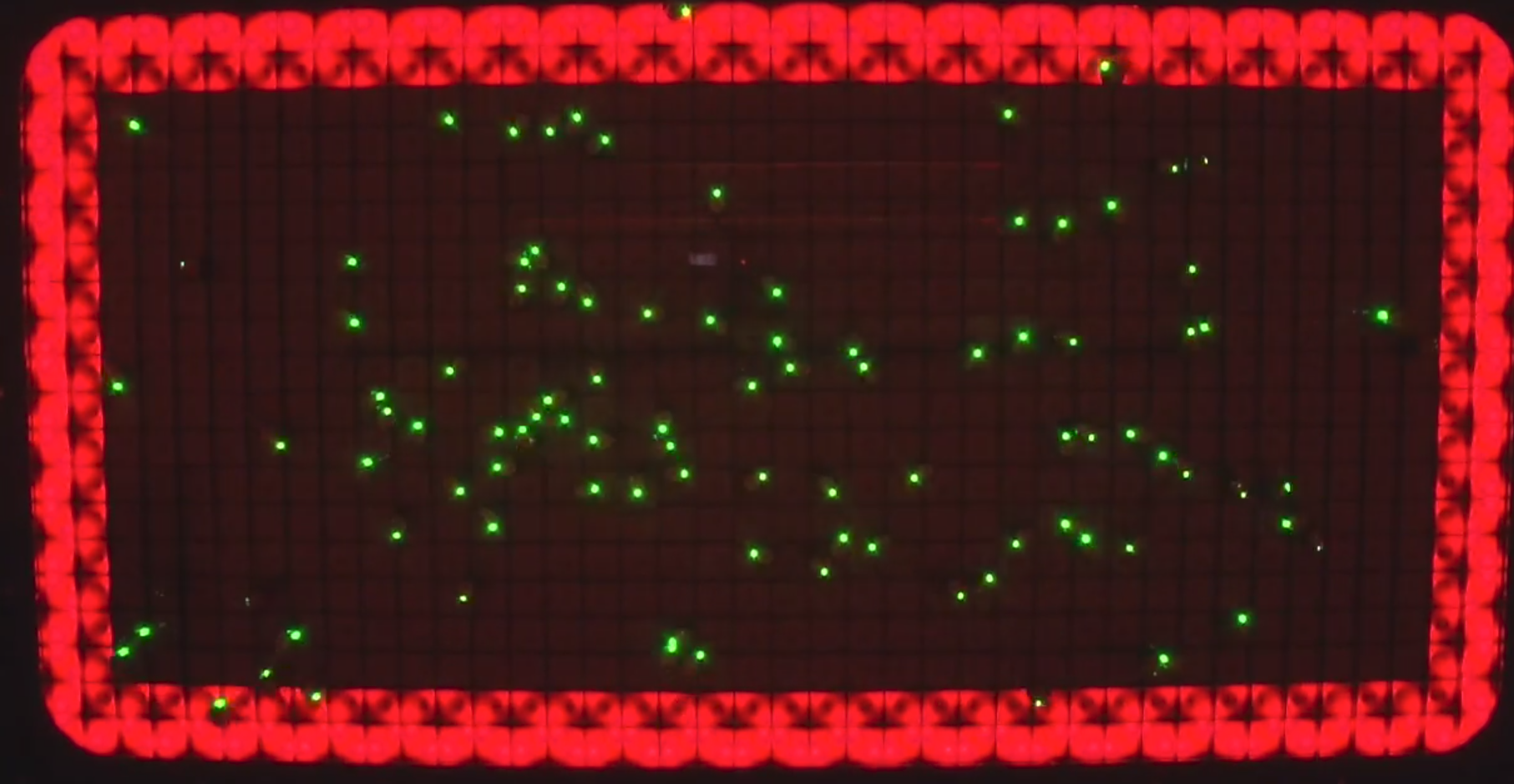
The Kilobot is provided with only one ambient-light sensor and one infrared sensor. In order to extend the sensing capabilites of this robot, the Kilogrid can be used to virtualize sensors not present on the Kilobot. For example, the video on the left shows how the Kilogrid can be used to allow the Kilobot to perceive the presence of the arena borders. Once a Kilobot reaches the proximity of the arena border it is informed of the presence of an obstacle by beacons cells (red color); this allows the robot to trigger an obstacle avoidance routine and to prevent it from being stuck against an obstacle it cannot perceive.
Virtual Actuators
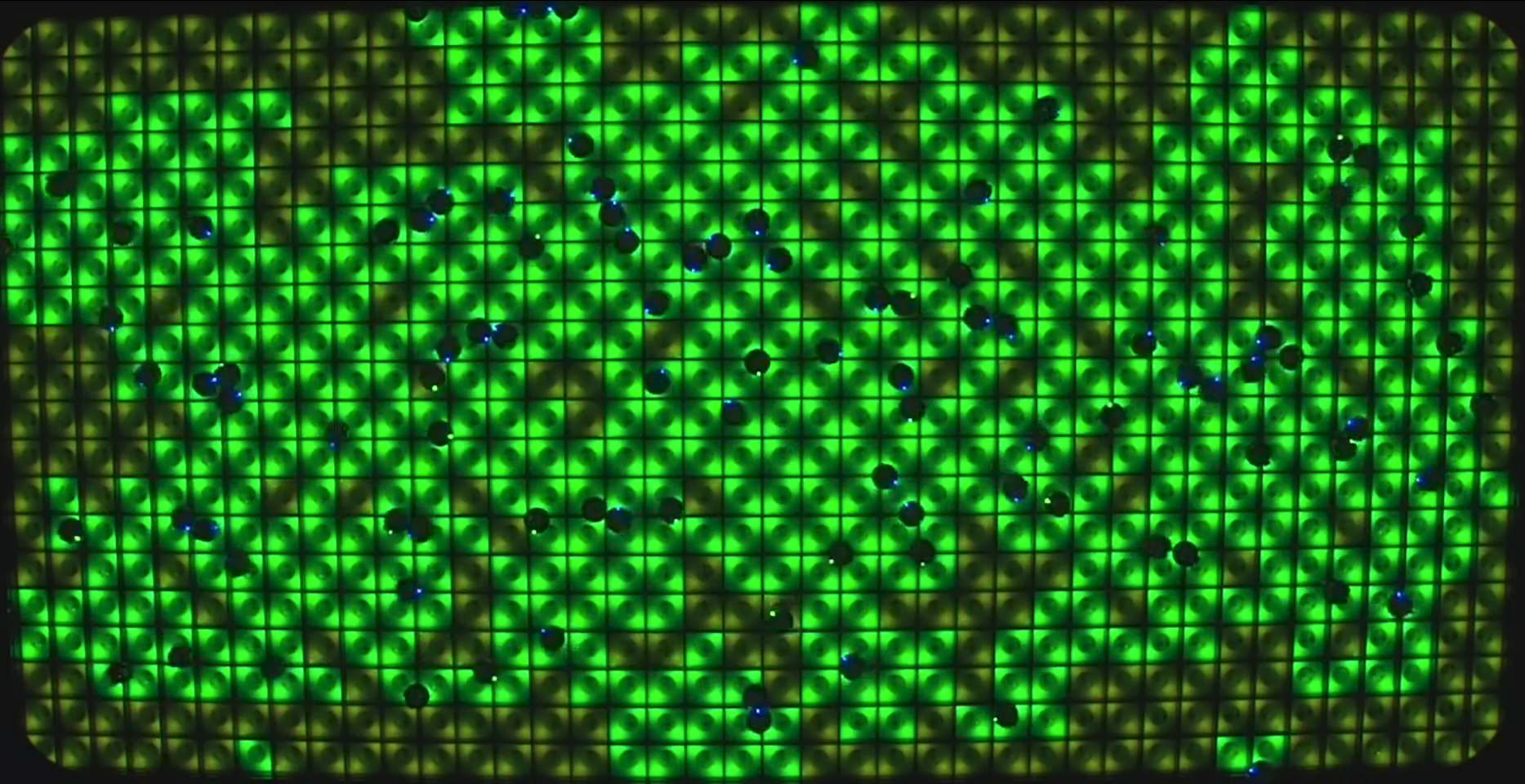
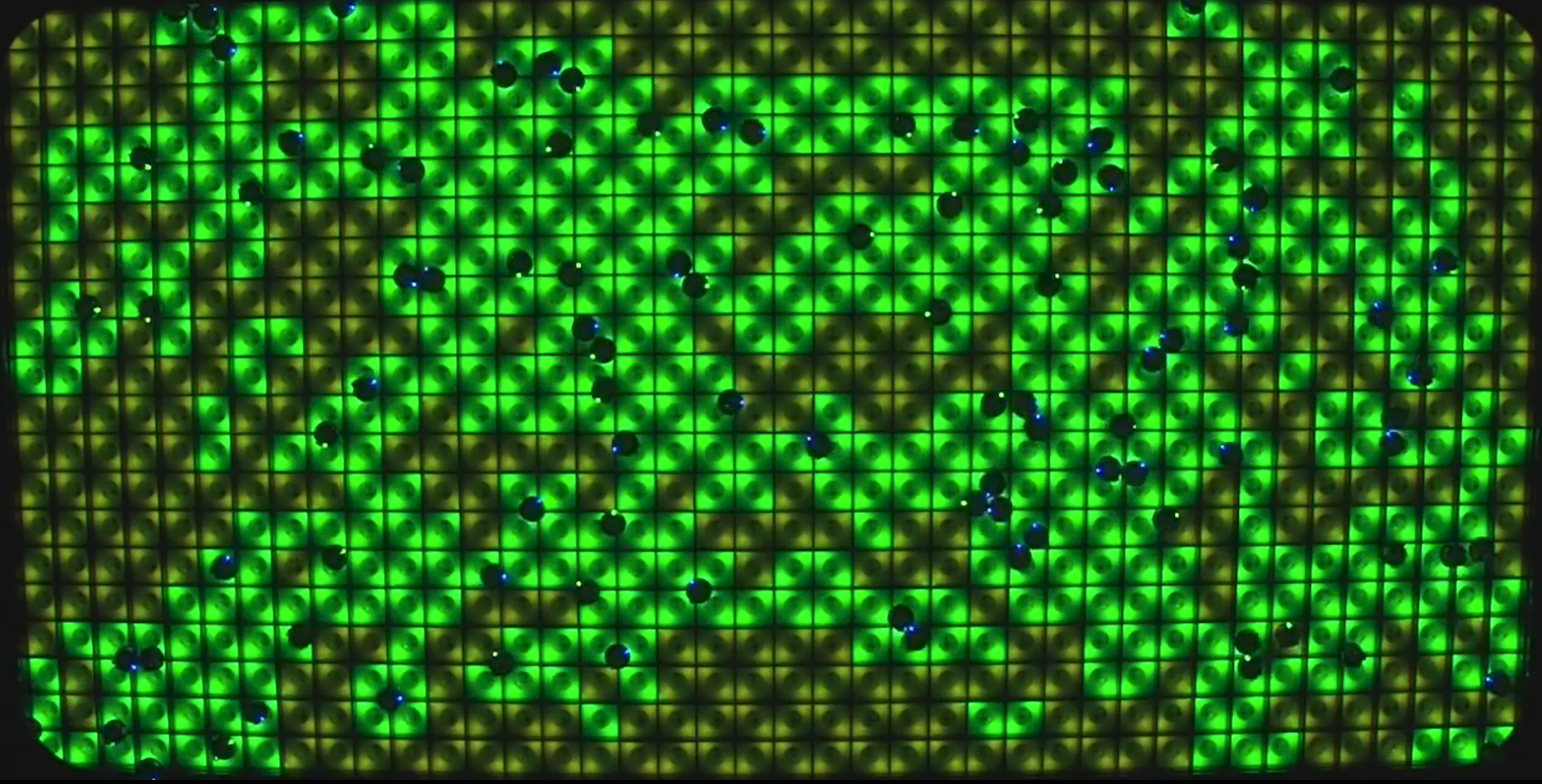
The only actuators present on the Kilobot robot are two vibrating engines. In order to extend the actuation capabilities of the Kilobot robot, the Kilogrid can be used to virtualize actuators not present on the Kilobot. For example, the video on the right shows how the Kilogrid can be used to allow the Kilobot to modify its environment. Specifically, a swarm of 10 Kilobots is required to water a garden as it gets dry. The cells of the Kilogrid represent garden patches that can be either dry (yellow color) or wet (green color). Once a Kilobot perceives the presence of a dry patch of garden, it deposits a certain amount of water which then evaporates at a certain rate.
Data Collection
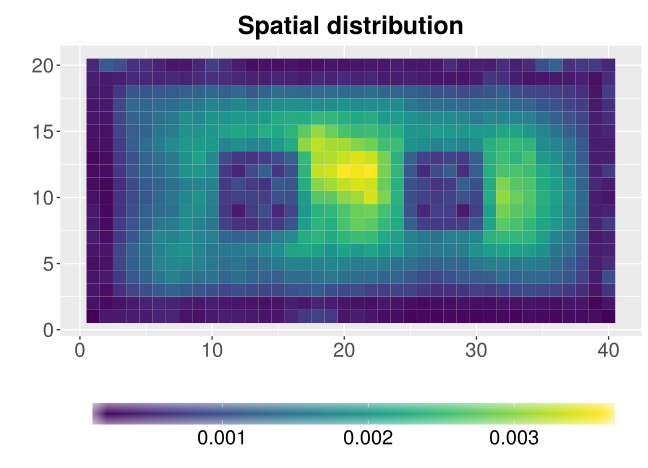
The collection of data from an experiment performed with a swarm of Kilobots can be performed by either saving data into the Kilobot's internal memory or by video-recording the experiments and post-processing the resulting videos. The Kilogrid allows researchers experimenting with the Kilobot to simplify this process. The Kilobots can be programmed to periodically transmit data to the Kilogrid which is forwarded to a remote workstation using the Kilogrid CAN network. For example, the figure on the left shows the spatial distribution of a swarm of 10 Kilobots performing a random walk behavior and a wall avoidance behavior. These results have been obtained by letting the Kilobots broadcast their identifiers and using the Kilogrid cells to collect the robots' positions.
Experiment Videos
obstacle avoidance - circles
plant watering - long
pheromone-based foraging
site selection
obstacle avoidance - walls
plant watering - short