























Jonas Kuckling, Thomas Stützle, and Mauro Birattari (June 2020)
|
Table of Contents |
Iterative improvement is an optimization technique that finds frequent application in heuristic optimization, but, to the best of our knowledge, has not yet been adopted in the automatic design of control software for robots. In this work, we investigate iterative improvement in the context of the automatic modular design of control software for robot swarms. In particular, we investigate the optimization of two control architectures: finite-state machines and behavior trees. Finite state machines are a common choice for the control architecture in swarm robotics whereas behavior trees have received less attention so far. We compare three different optimization techniques: iterative improvement, Iterated F-race, and a hybridization of Iterated F-race and iterative improvement. For reference, we include in our study also i) a design method in which behavior trees are optimized via genetic programming and ii) EvoStick, a yardstick implementation of the neuro-evolutionary swarm robotics approach. The results indicate that iterative improvement is a viable optimization algorithm in the automatic modular design of control software for robot swarms.
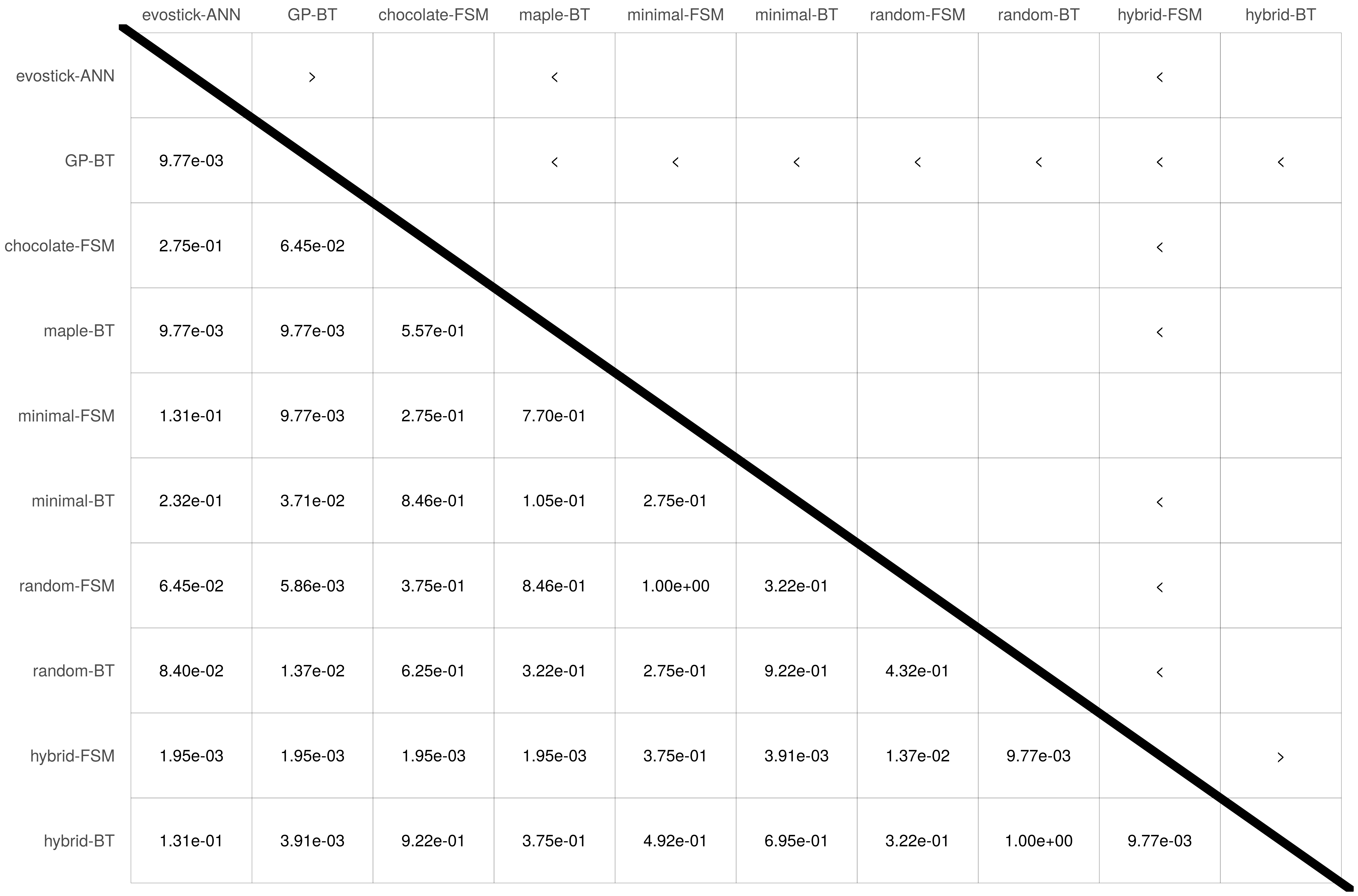
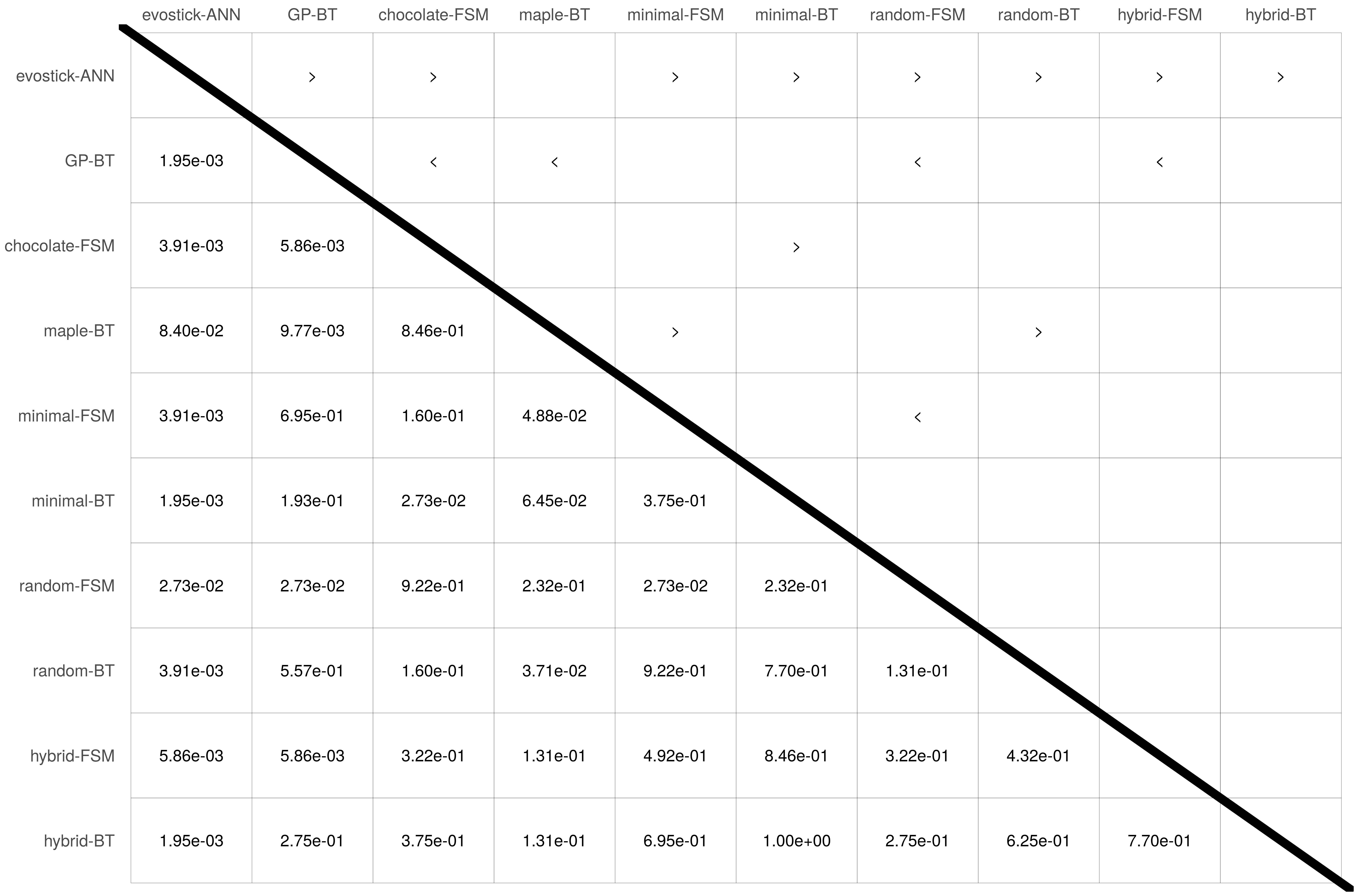
| Design method | 12.5k | 25k | 50k |
|---|---|---|---|
| Chocolate | |
|
|
| Maple | |
|
|
| Minimal-FSM | |
|
|
| Minimal-BT | |
|
|
| Random-FSM | |
|
|
| Random-BT | |
|
|
| Hybrid-FSM | |
|
|
| Minimal-BT | |
|
|
Videos of the best instances of control software for each design method can be downloaded.
 |
 |
| 12.5k (design) | 12.5k (pseudoreality) |
 |
 |
| 25k (design) | 25k (pseudoreality) |
 |
 |
| 50k (design) | 50k (pseudoreality) |
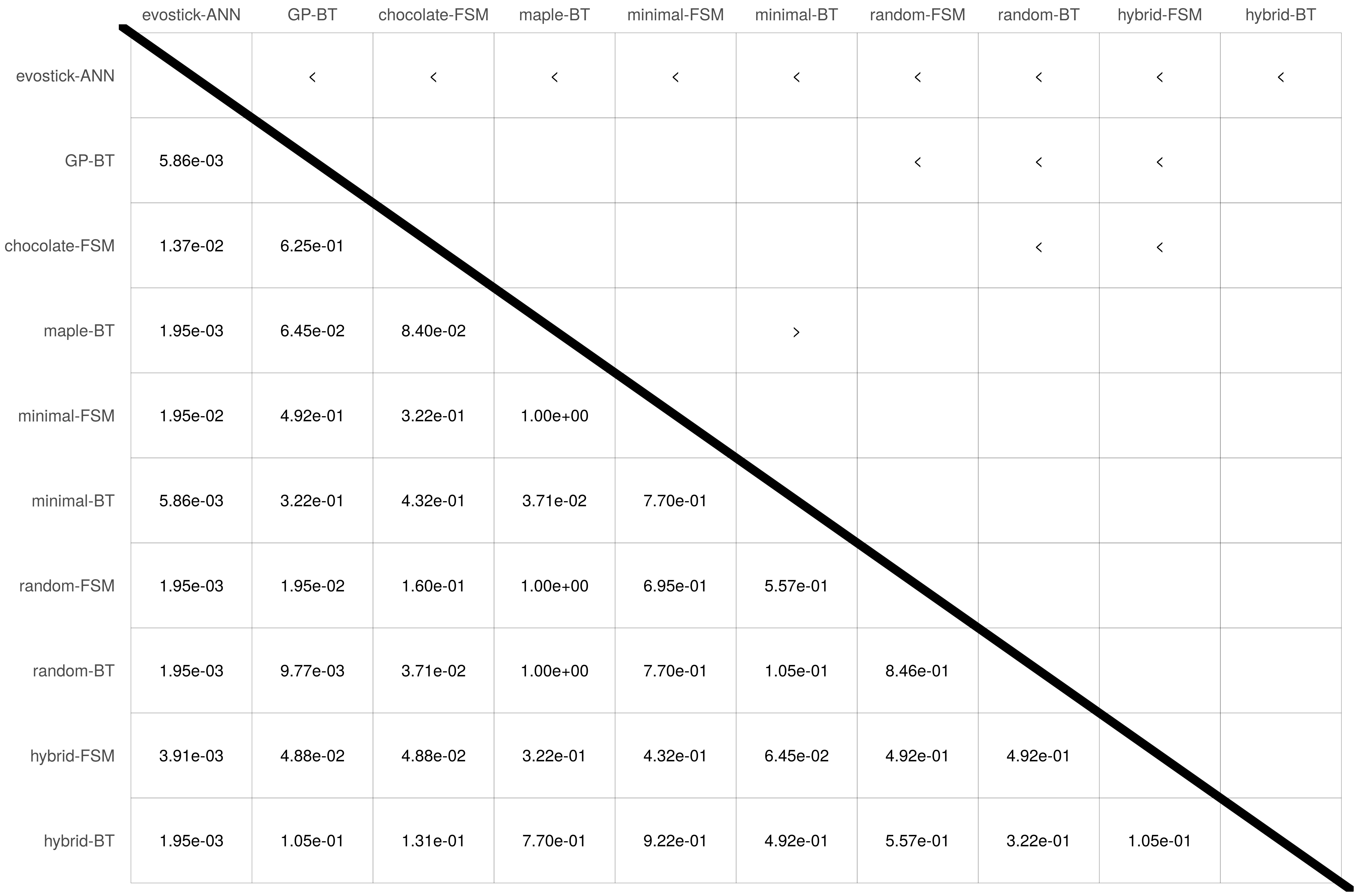
| Design method | 12.5k | 25k | 50k |
|---|---|---|---|
| Chocolate |  |
 |
 |
| Maple |  |
 |
 |
| Minimal-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
| Random-FSM |  |
 |
 |
| Random-BT |  |
 |
 |
| Hybrid-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
Videos of the best instances of control software for each design method can be downloaded.
 |
 |
| 12.5k (design) | 12.5k (pseudoreality) |
 |
 |
| 25k (design) | 25k (pseudoreality) |
 |
 |
| 50k (design) | 50k (pseudoreality) |
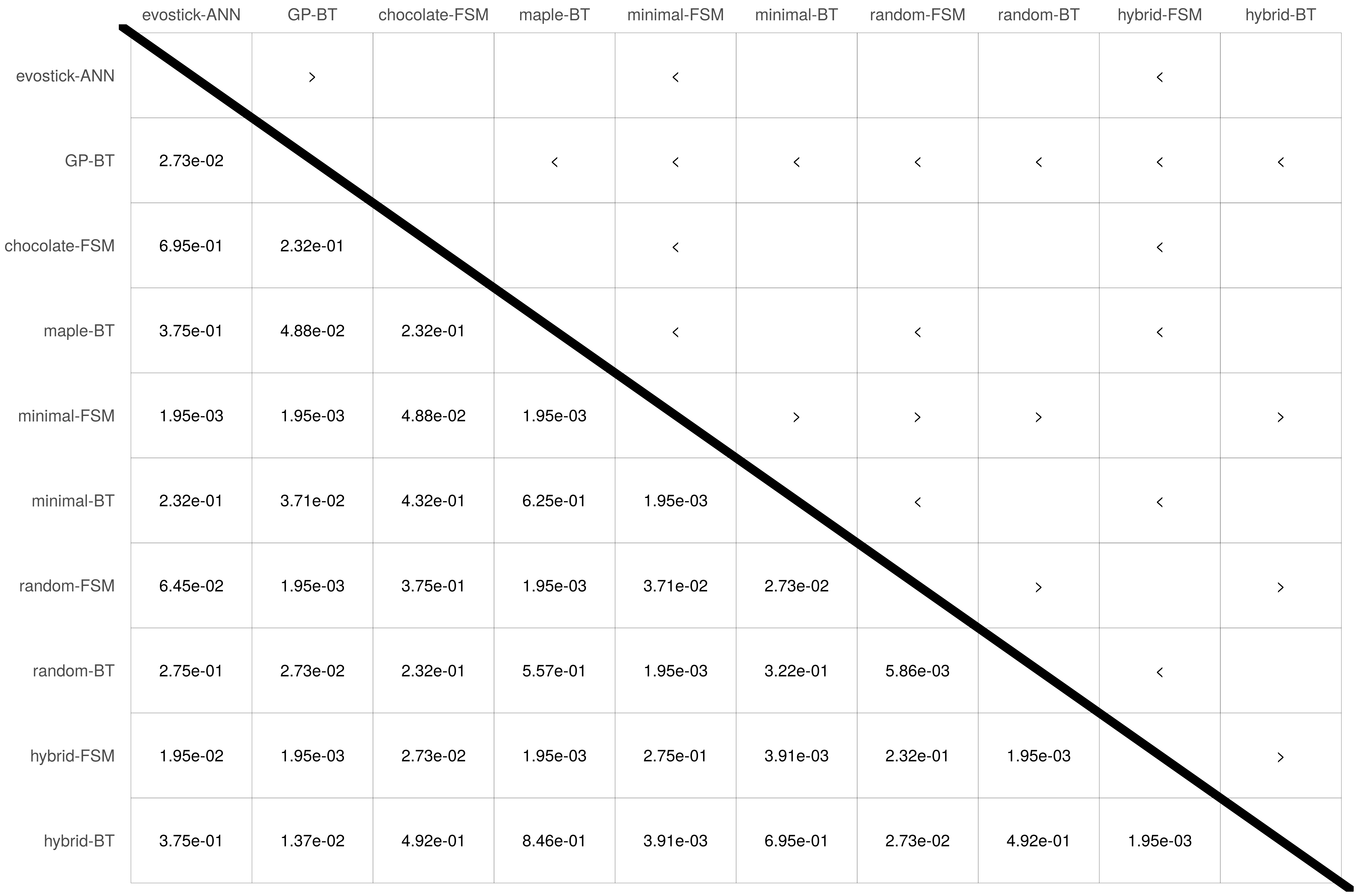
| Design method | 12.5k | 25k | 50k |
|---|---|---|---|
| Chocolate |  |
 |
 |
| Maple |  |
 |
 |
| Minimal-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
| Random-FSM |  |
 |
 |
| Random-BT |  |
 |
 |
| Hybrid-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
Videos of the best instances of control software for each design method can be downloaded.
 |
 |
| 12.5k (design) | 12.5k (pseudoreality) |
 |
 |
| 25k (design) | 25k (pseudoreality) |
 |
 |
| 50k (design) | 50k (pseudoreality) |
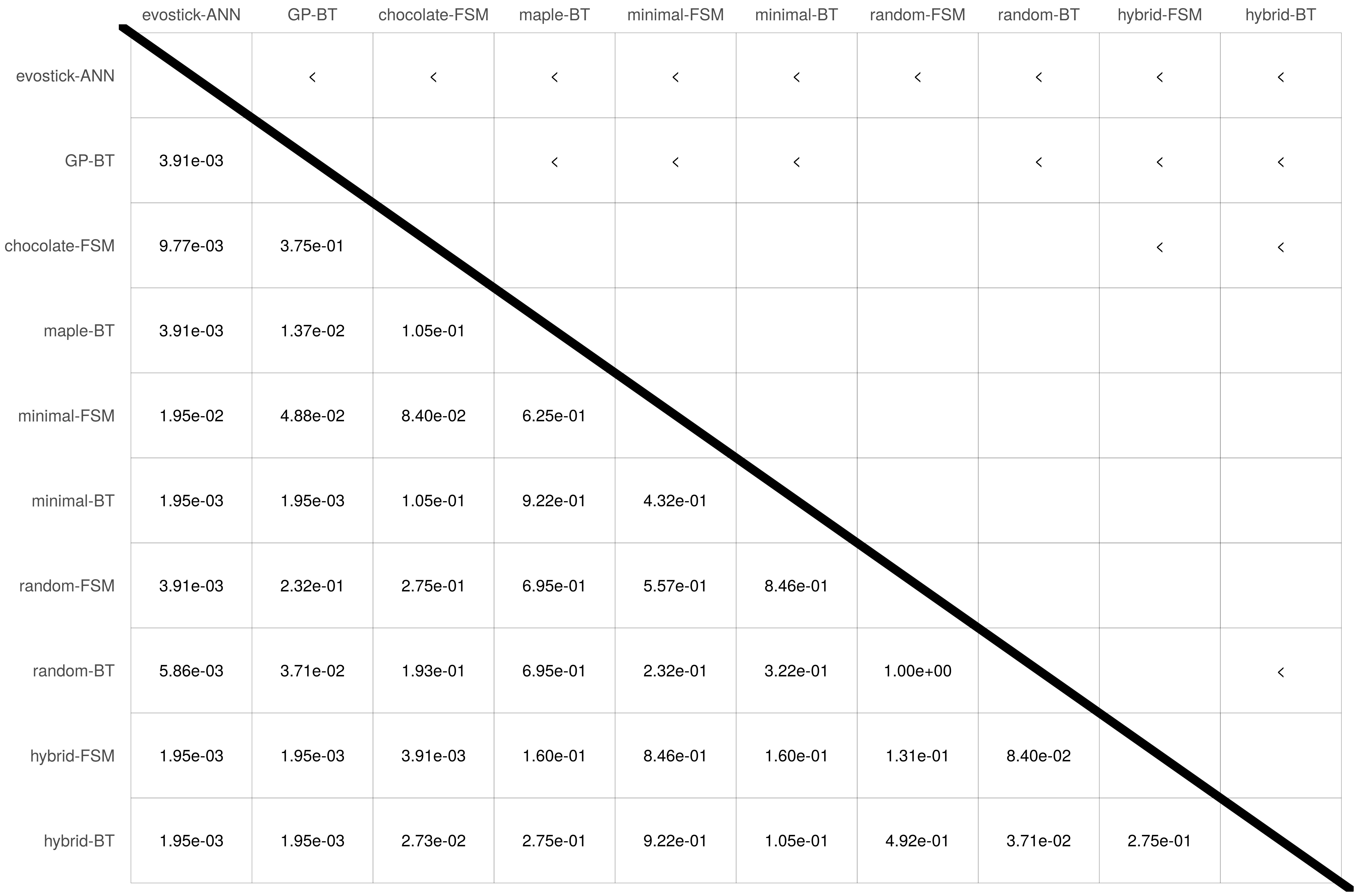
| Design method | 12.5k | 25k | 50k |
|---|---|---|---|
| Chocolate |  |
 |
 |
| Maple |  |
 |
 |
| Minimal-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
| Random-FSM |  |
 |
 |
| Random-BT |  |
 |
 |
| Hybrid-FSM |  |
 |
 |
| Minimal-BT |  |
 |
 |
Videos of the best instances of control software for each design method can be downloaded.
 |
 |
| 12.5k (design) | 12.5k (pseudoreality) |
 |
 |
| 25k (design) | 25k (pseudoreality) |
 |
 |
| 50k (design) | 50k (pseudoreality) |
The source code of the software used to generate the experiments is available as a download. The downloaded zip file contains installation instructions for the software. The software can also be installed from the hosted repositories, see the installation instruction for links.
The results and generated control software are available as a download.