SCA
LCN
SPC
CFA
AAC
Gianpiero
Francesca, Manuele Brambilla, Arne
Brutschy, Lorenzo Garattoni, Roman Miletitch, Gaetan Podevijn,
Andreagiovanni Reina, Touraj Soleymani, Mattia Salvaro, Carlo
Pinciroli, Vito
Trianni, and Mauro Birattari
March 2014
Table of Contents
|
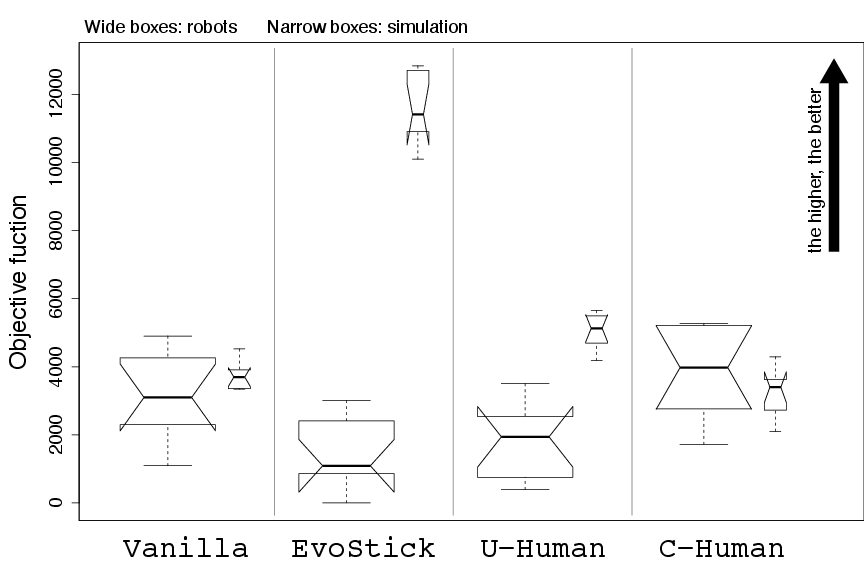
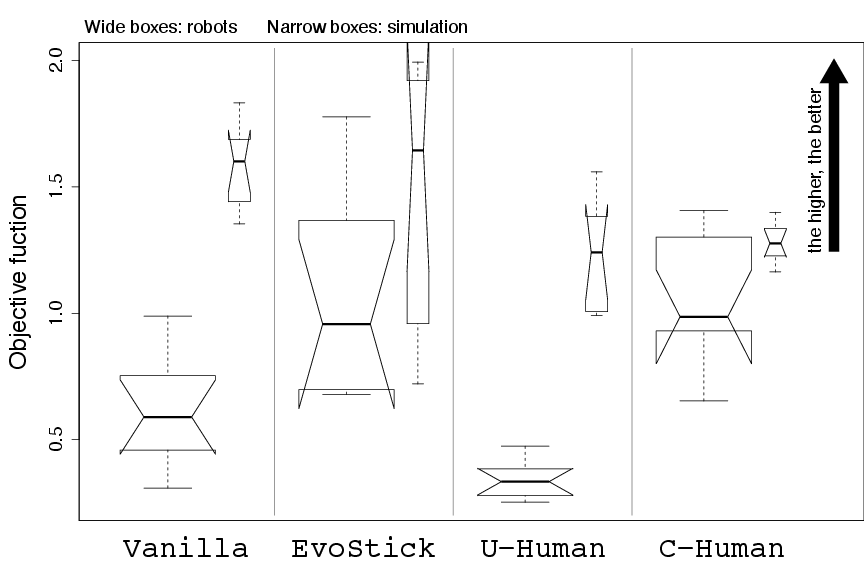
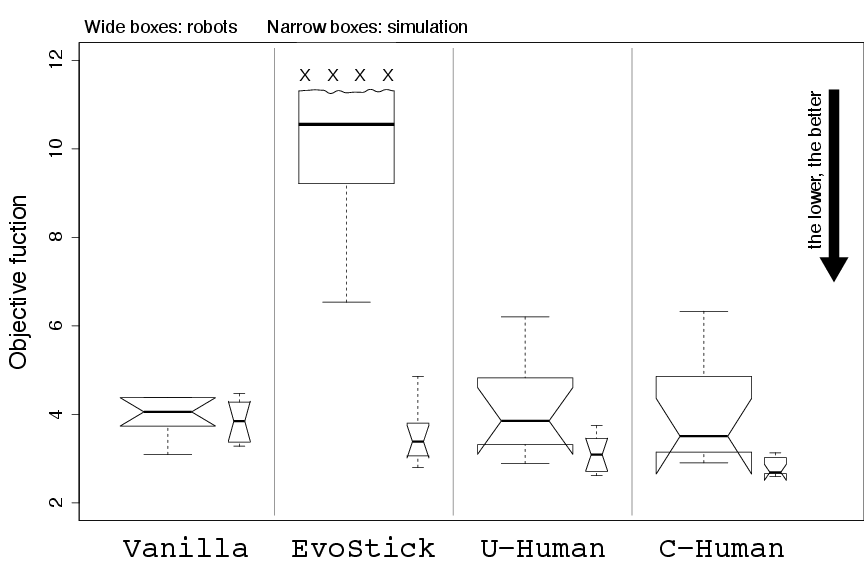
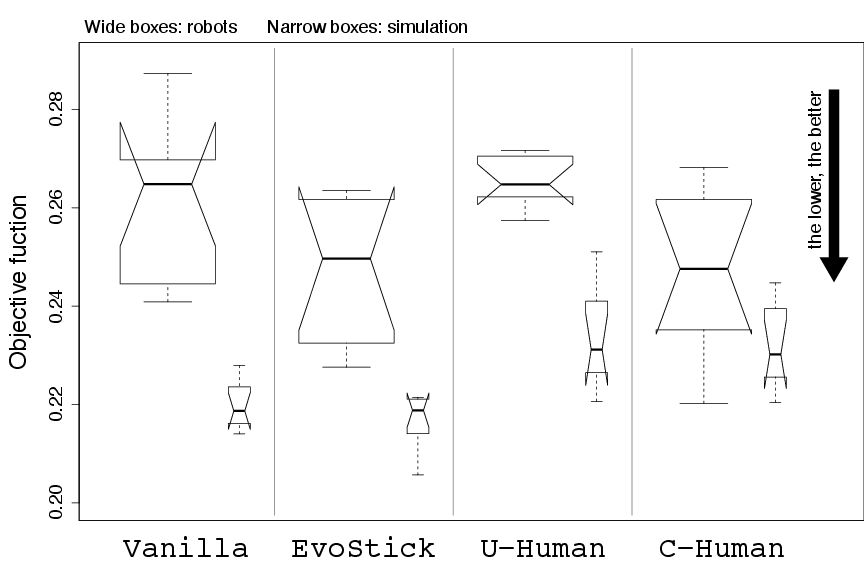
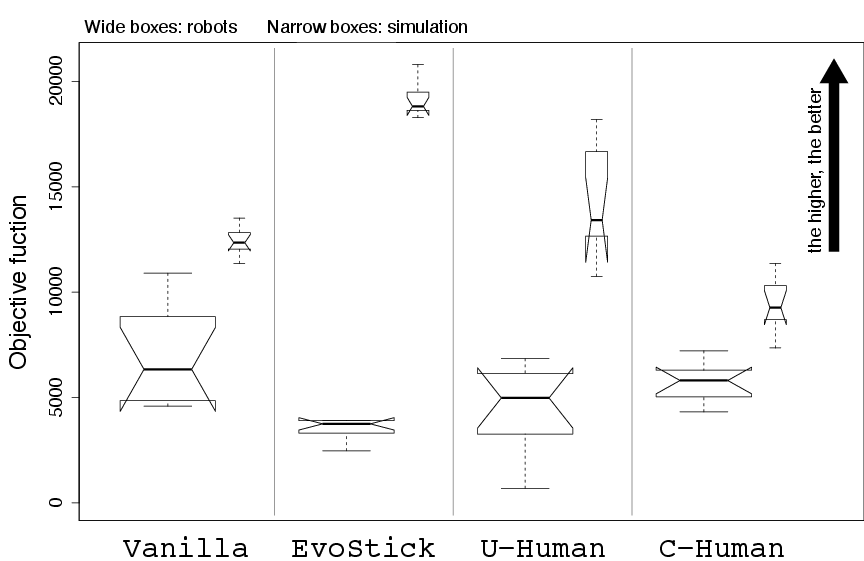
We present an experiment in automatic design of robot swarms. For the first time in the swarm robotics literature, we perform an objective comparison of multiple design methods: we compare swarms designed by two automatic methods—AutoMoDe-Vanilla and EvoStick— with swarms manually designed by human experts. AutoMoDe-Vanilla and EvoStick have been previously published and tested on two tasks. To evaluate their generality, in this paper we test them without any modification on five new tasks. Besides confirming that AutoMoDe-Vanilla is effective, our results provide new insight into the design of robot swarms. In particular, our results indicate that, at least under the adopted experimental protocol, not only does automatic design suffer from the reality gap, but also manual design. The results also show that both manual and automatic methods benefit from bias injection. In this work, bias injection consists in restricting the design search space to the combinations of pre-existing modules. The results indicate that bias injection helps to overcome the reality gap, yielding better performing robot swarms.
In the following we show, for each task, four videos, one for each method: AutoMoDe-Vanilla, EvoStick, U-Human and C-Human. These videos are randomly selected. The complete collection of videos is avilable for download: videos.tar.gz
In SCA (Shelter with Constrained Access), the goal of the swarm is to maximize the number of robots on an aggregation area. The aggregation area has a rectangular shape, is characterized by a white ground, and is surrounded by walls on three sides. The environment presents also a light source and two black regions that are positioned in front and aside the aggregation area, respectively.
In LCN (Largest Covering Network), the robots must maintain connection with each other, while trying to cover the largest possible area. We assume that i) two robots are connected when their distance is less than 0.25 m, and ii) each robot covers a circular area of radius 0.35 m.
In CFA (Coverage with Forbidden Areas), the goal of the swarm is to cover the entire arena except a few forbidden areas characterized by a black ground.
In SPC (Surface and Perimeter Coverage), the goal of the swarm is to cover the surface of a white square region and the perimeter of a black circular region.
In AAC (Aggregation with Ambient Cues), the goal of the swarm is to maximize the number of robots on an aggregation area represented by a black region. Besides the black region, the environment comprises a white region and a light source that is placed south of the black region.
The data of all the experiments are available for download here. You can import them in R using read.table("results.txt",header=T).
If the notches of two boxes do not overlap, the difference between the corresponding central values is statistically significant
| SCA |
LCN |
| SPC |
CFA |
| AAC |
The pseudocode of the objective functions is available for download: SCA, LCN, CFA, SPC, and AAC.
The descriptions of the tasks as they were produced by experts are available for download:
SCA,
LCN,
CFA,
SPC, and
AAC.
These documents were not originally meant to be
distributed. They are the document that were distributed to the
other experts as a description of the task to be solved. As
they were not intended to be distributed, the language is not
polished and the notation used to describe the objective
function might differ from the une adopted in the paper.