Non-spatial selection | ||
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Spatial selection | ||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
by Eliseo Ferrante, Ali Emre Turgut, Alessandro Stranieri, Carlo Pinciroli, Mauro Birattari, and Marco Dorigo
December 2011
|
This page contains all supplementary information for the article A Self-Adaptive Communication Strategy for Flocking in Stationary and Non-Stationary Environments. Table of Contents |
We propose a self-adaptive communication strategy for controlling the heading direction of a swarm of mobile robots during flocking. We consider the problem where a small group of informed robots has to guide a large swarm along a desired direction. We consider three versions of this problem: one where the desired direction is fixed; one where the desired direction changes over time; one where a second group of informed robots has information about a second desired direction that conflicts with the first one, but has higher priority. The goal of the swarm is to follow, at all times, the desired direction that has the highest priority and, at the same time, to keep cohesion.
The proposed strategy allows the informed robots to guide the swarm when only one desired direction is present. Additionally, a self-adaptation mechanism allows the robots to indirectly sense the second desired direction, and makes the swarm follow it. In experiments with both simulated and real robots, we evaluate how well the swarm tracks the desired direction and how well it maintains cohesion. We show that, using self-adaptive communication, the swarm is able to follow the desired direction with the highest priority at all times without splitting.
Keywords:self-organized flocking, local communication strategies, collective decision-making, self-organization, swarm intelligence, swarm robotics.
|
|
|
|
This video shows a group of eight robots performing flocking using the HCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group cannot follow the goal direction (below the value). Goal direction A: 85 degrees (down) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the ICS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the goal direction without any problem (below the value). Goal direction A: 3 degrees (left) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the SCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the goal direction without any problem (below the value). Goal direction A: 131 degrees (down-right) Download the video in AVI format. |
|
|
|
|
This video shows a group of eight robots performing flocking using the HCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. In the middle of the experiment, that robot becomes non-informed and another one is selected at random, and the goal direction is also changed at random. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group cannot follow either of the two goal directions (below the values of the goal directions). Goal direction A: -125 degrees (up-right) Goal direction B: 47 degrees (down-left) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the ICS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. In the middle of the experiment, that robot becomes non-informed and another one is selected at random, and the goal direction is also changed at random. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the two goal directions without any problem (below the values of the goal directions). Goal direction A: 125 degrees (down-right) Goal direction B: 5 degrees (left) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the SCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. In the middle of the experiment, that robot becomes non-informed and another one is selected at random, and the goal direction is also changed at random. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the two goal directions without any problem (below the values of the goal directions). Goal direction A: 85 degrees (down) Goal direction B: -44 degrees (up-left) Download the video in AVI format. |
|
|
|
|
This video shows a group of eight robots performing flocking using the HCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. At some point during the experiment, while that robot still keeps being informed, another one is selected at random, and it becomes informed about a goal direction with higher priority, that points in the opposite way. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group cannot follow either of the two goal directions (below the values of the goal directions). Goal direction A: 119 degrees (down-right) Goal direction B: -61 degrees (up-left) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the ICS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. At some point during the experiment, while that robot still keeps being informed, another one is selected at random, and it becomes informed about a goal direction with higher priority, that points in the opposite way. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the first goal direction without any problem, but then splits afterwards due to the conflicting goal directions between the two robots (below the values of the goal directions). Goal direction A: -22 degrees (slightly up-left) Goal direction B: 158 degrees (slightly down-right) Download the video in AVI format. |
This video shows a group of eight robots performing flocking using the SCS communication strategy. This experiment represent one out of ten runs used to gather quantitative date. In the experiment, one robot, chosen at random, is informed about the goal direction and is leading the rest of the group that is non informed. At some point during the experiment, while that robot still keeps being informed, another one is selected at random, and it becomes informed about a goal direction with higher priority, that points in the opposite way. Our frame of reference is set in such a way that the direction of the x-axis is pointing on the left towards the light source, and we use the counter clockwise convention. In the video, we see that the group can follow the two goal directions without splitting even in presence of conflicting information (below the values of the goal directions). Goal direction A: -149 degrees (up-right) Goal direction B: 31 degrees (down-left) Download the video in AVI format. |
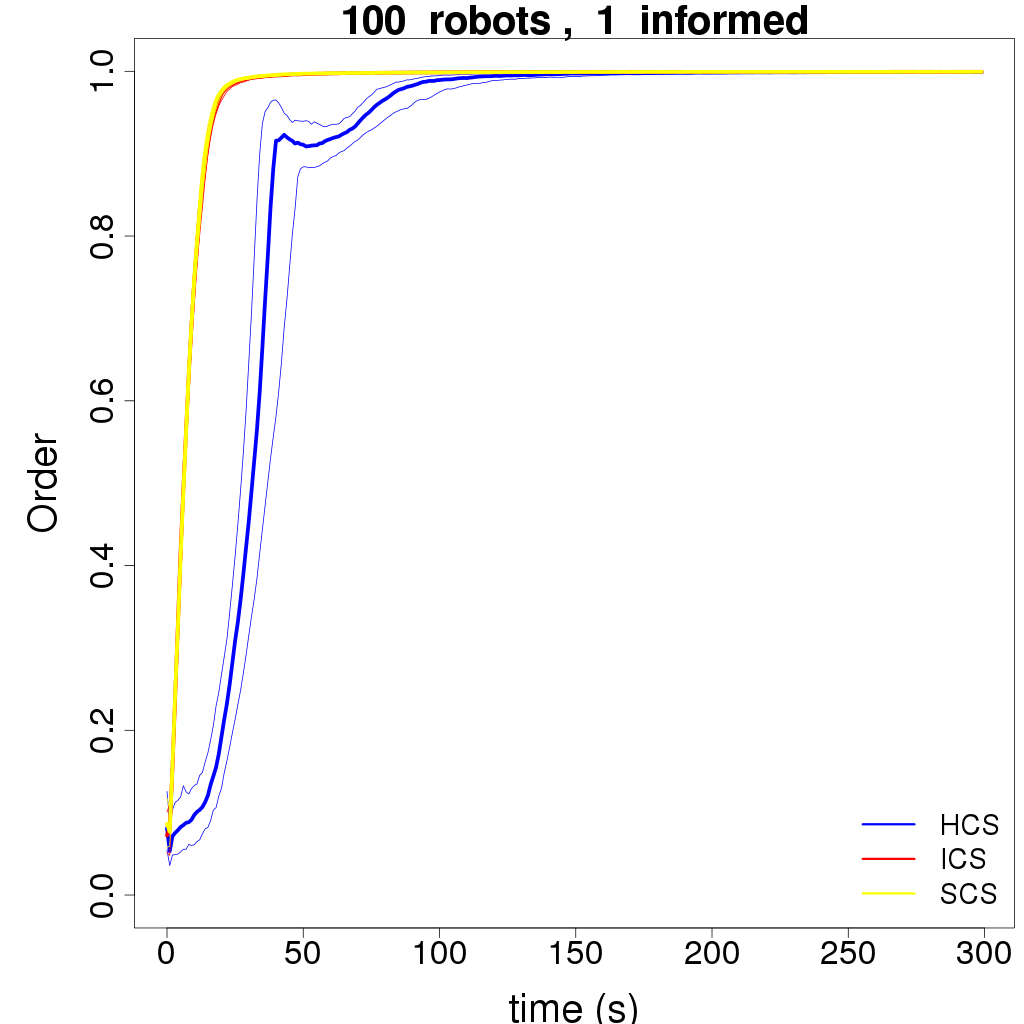
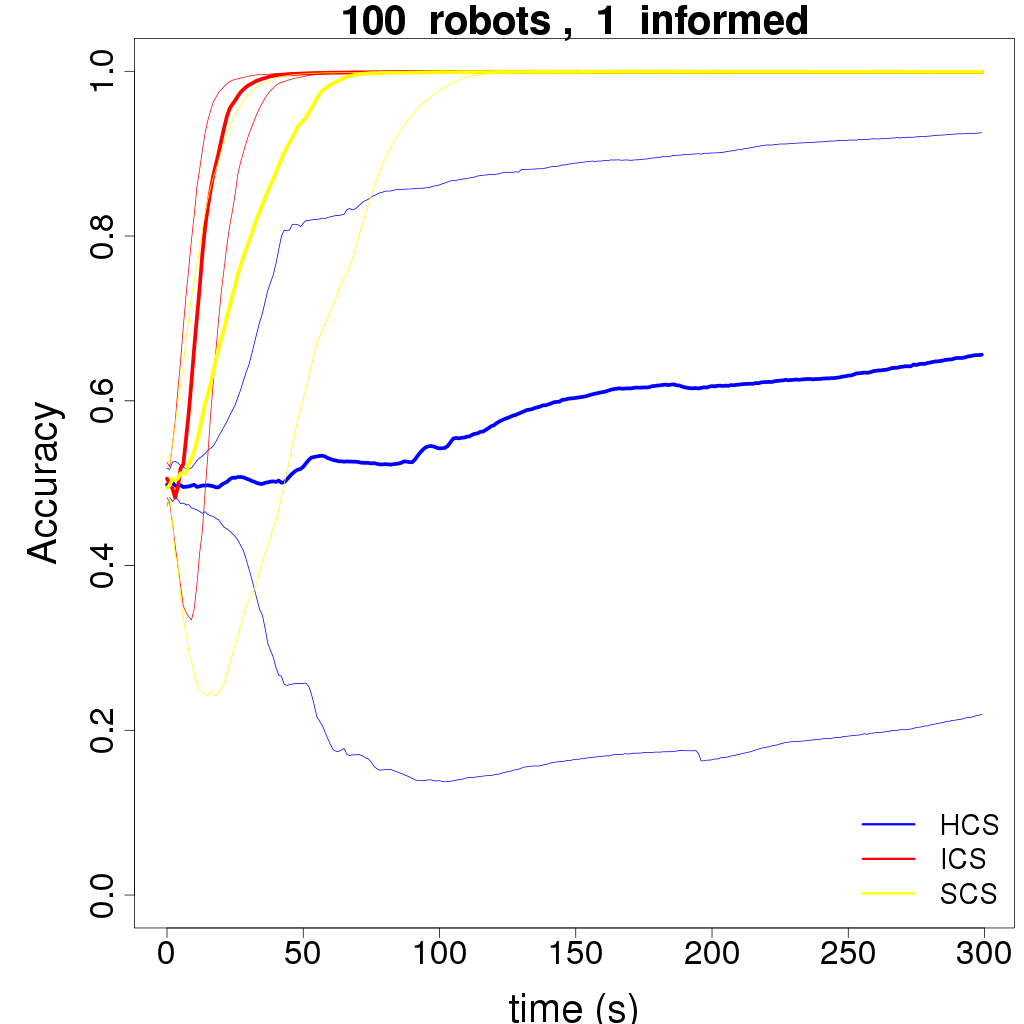
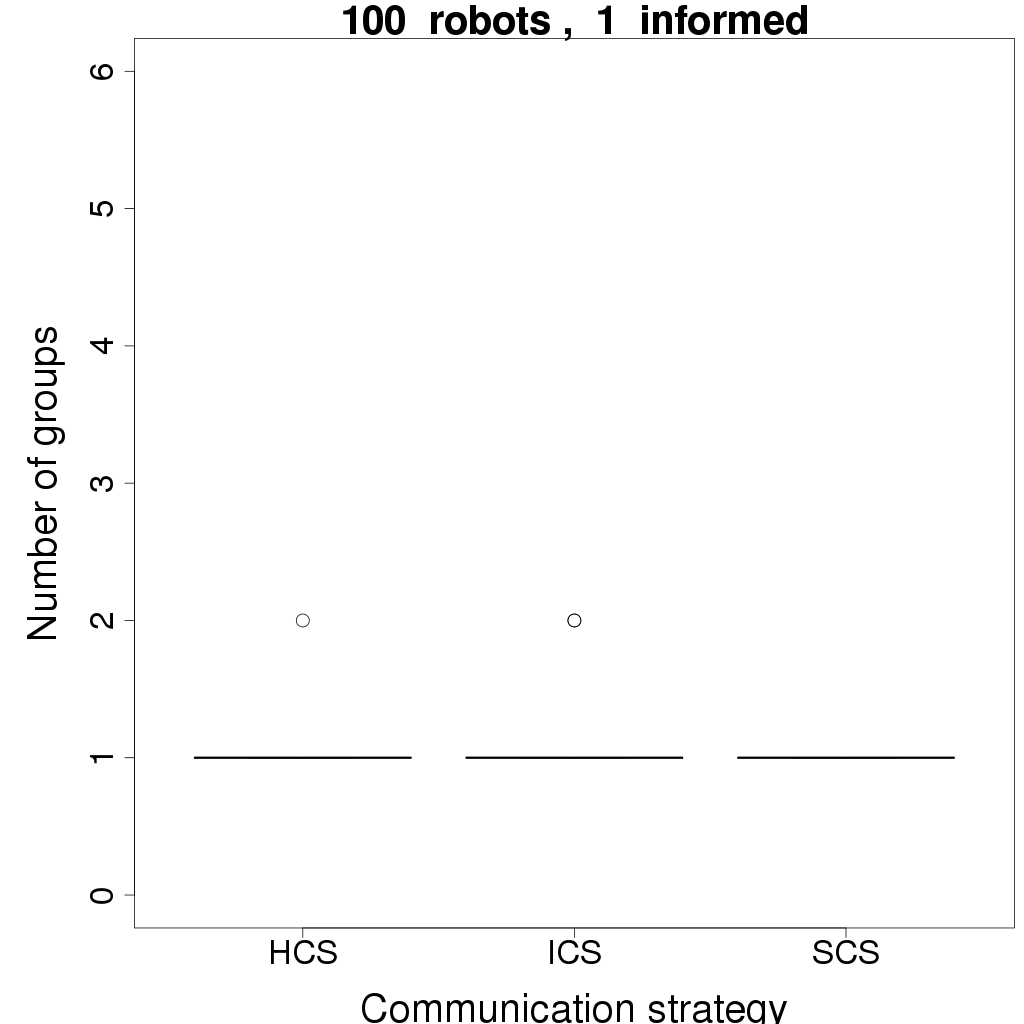
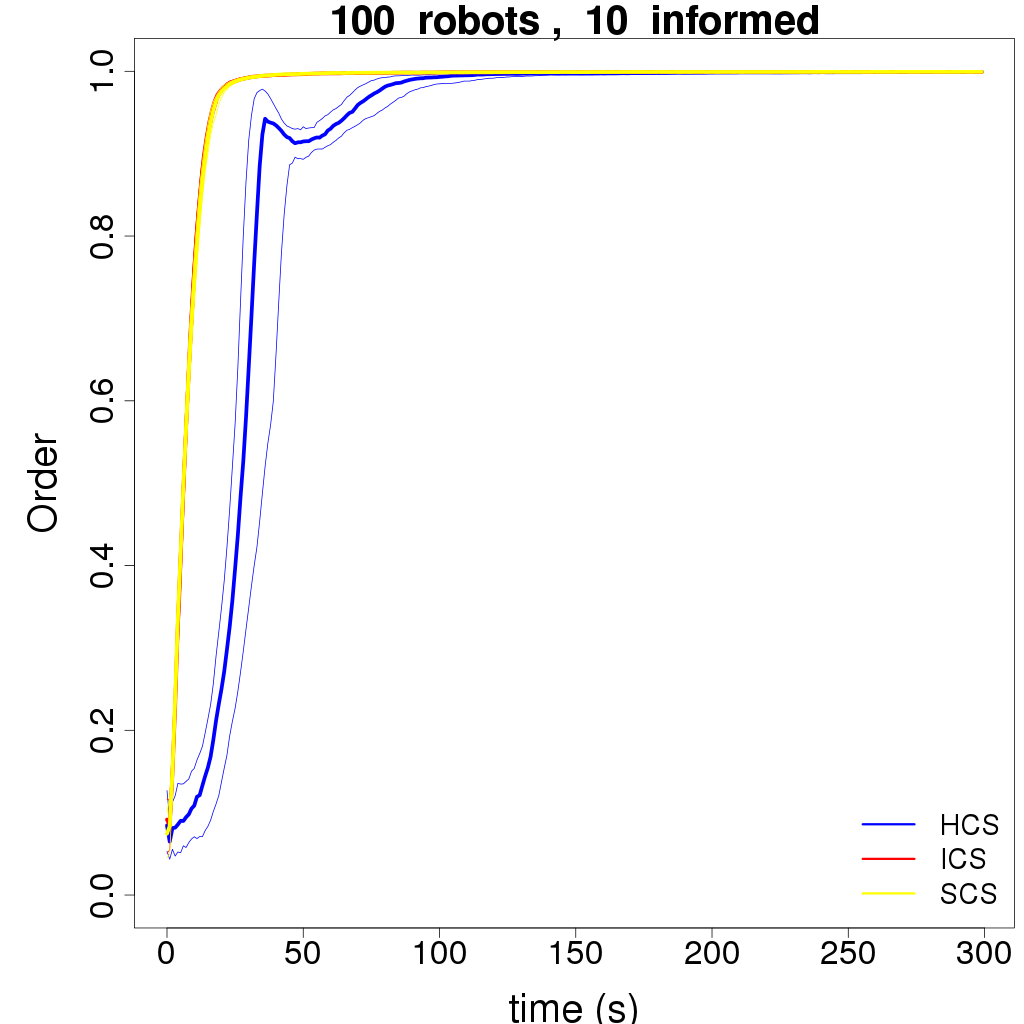
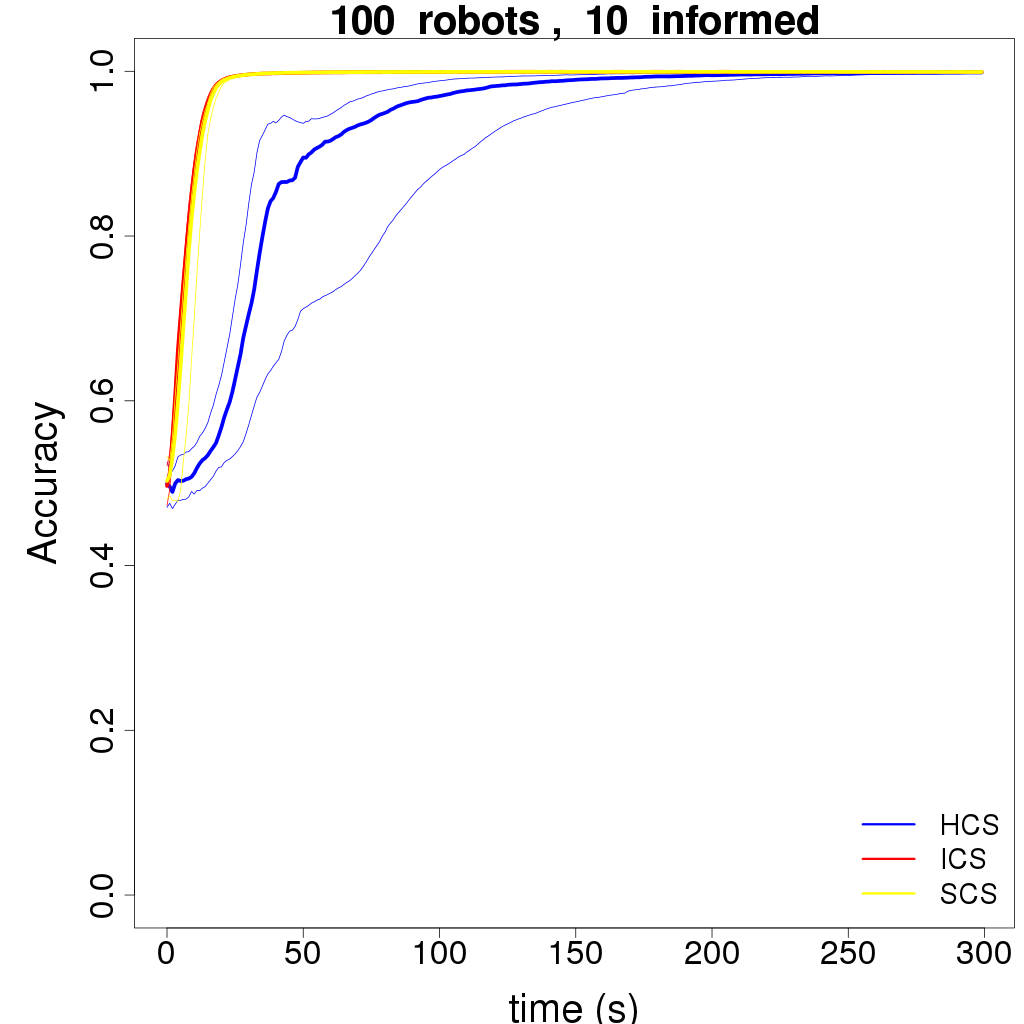
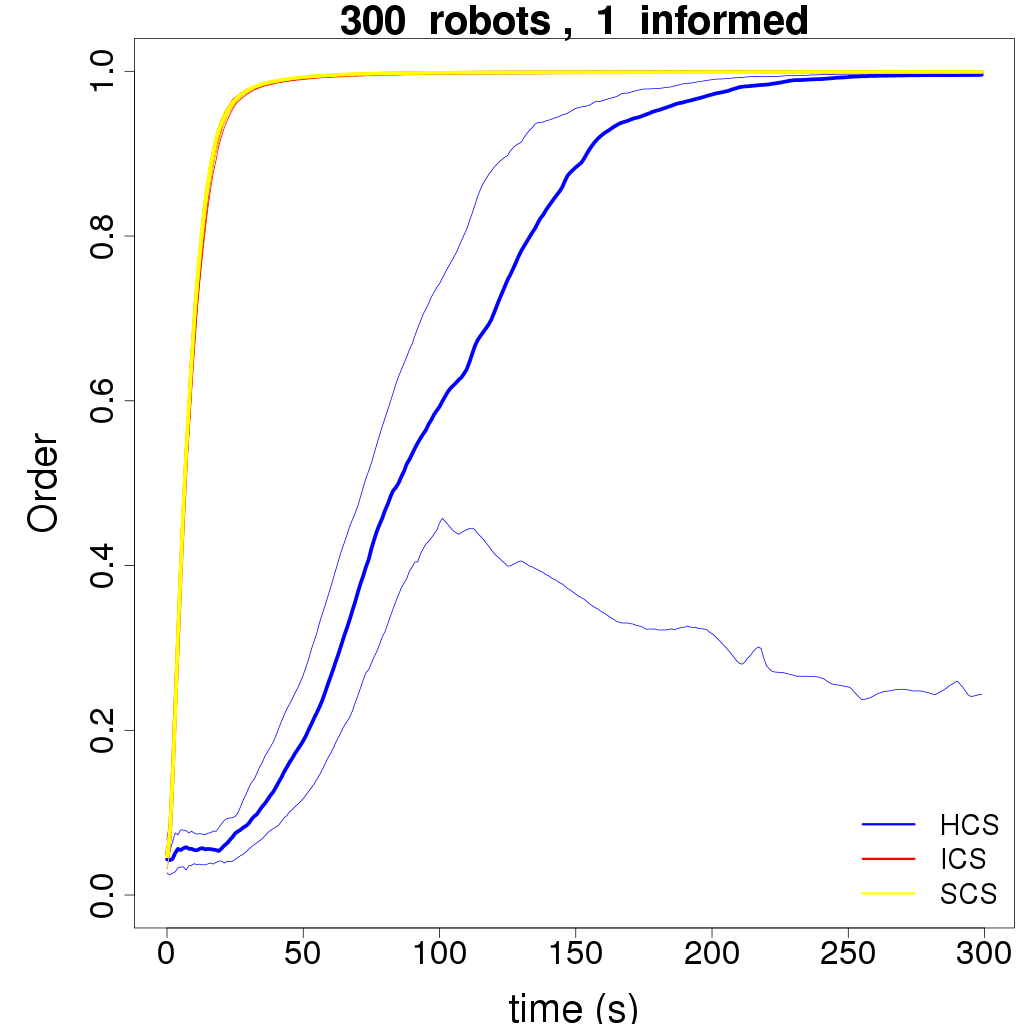
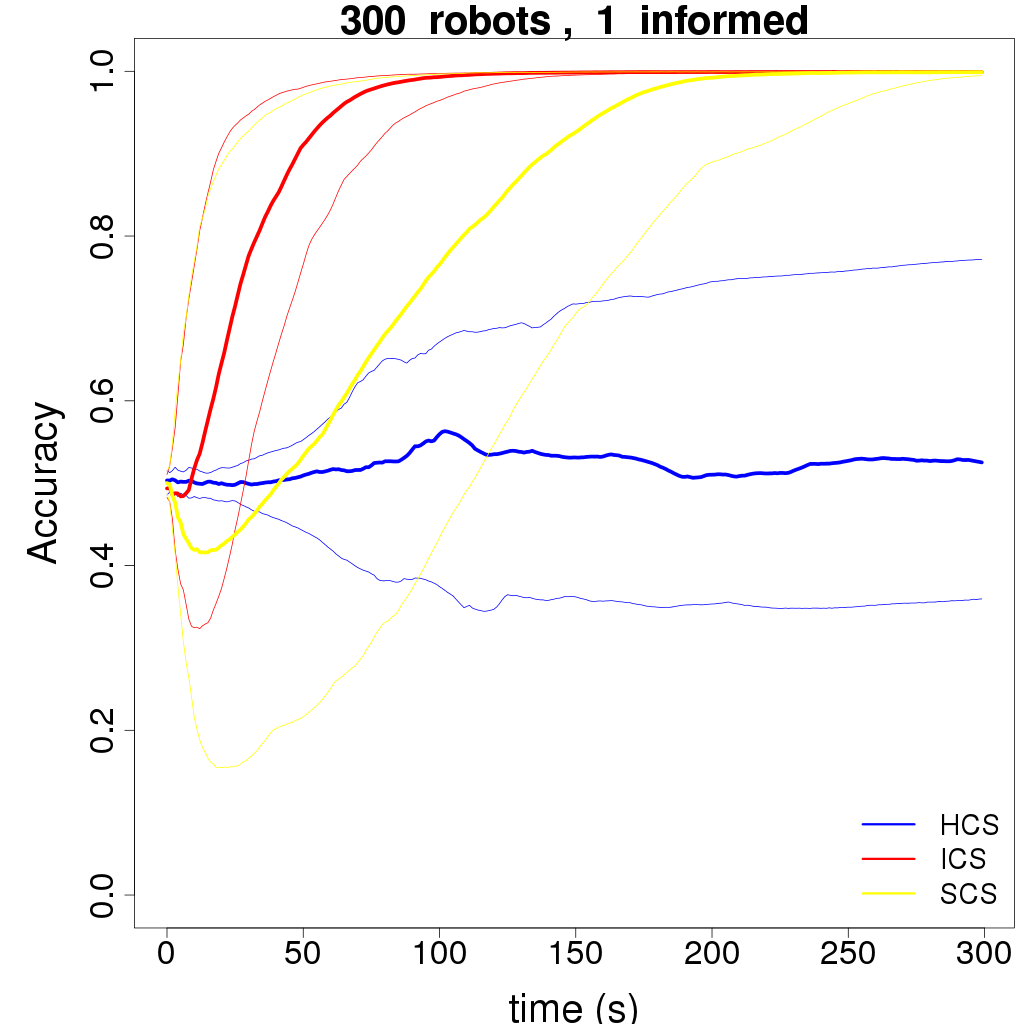
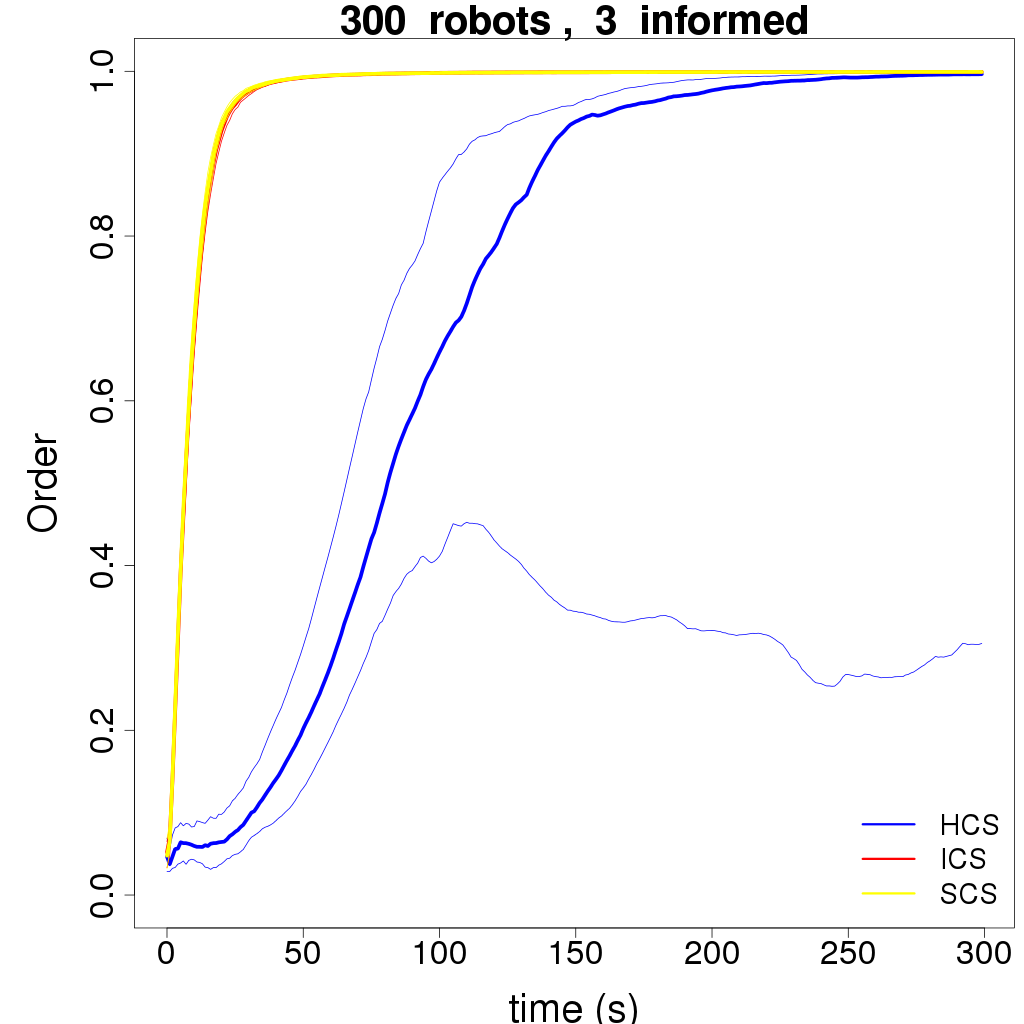
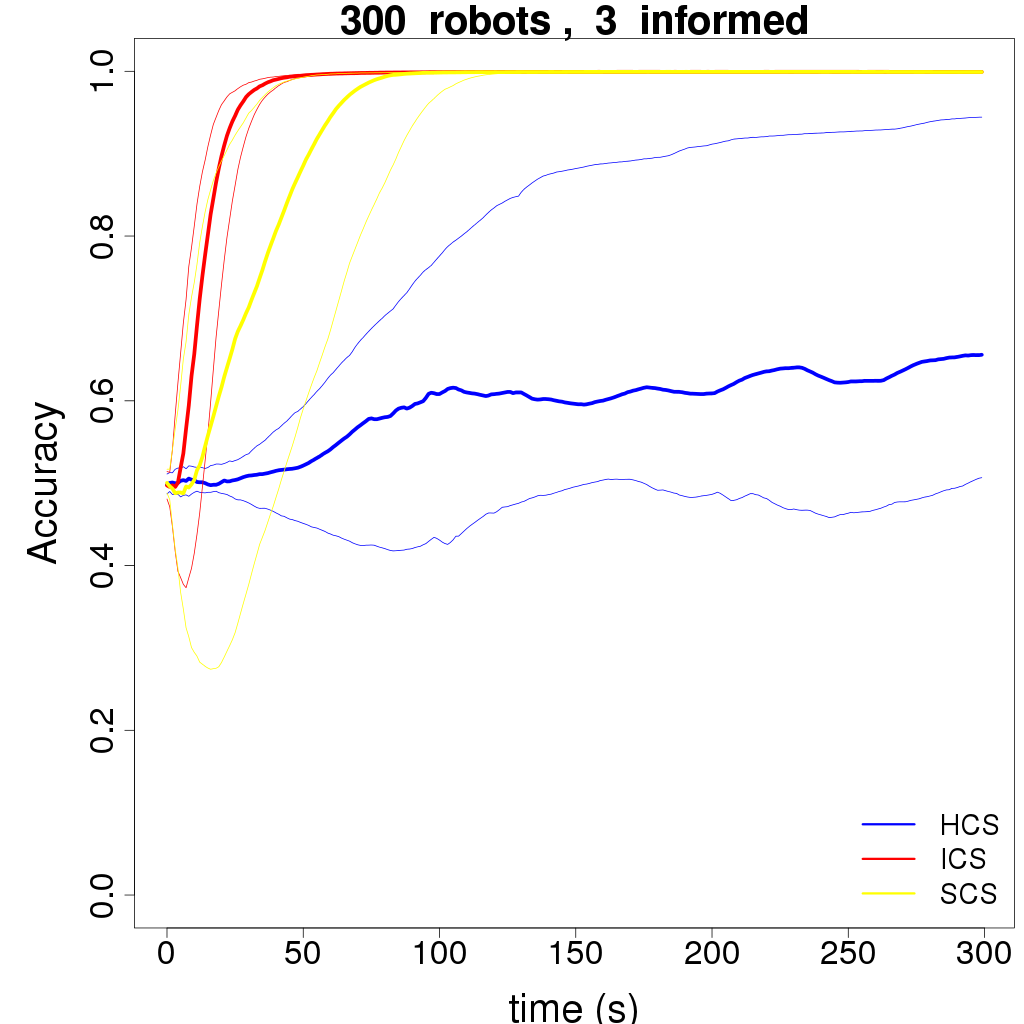
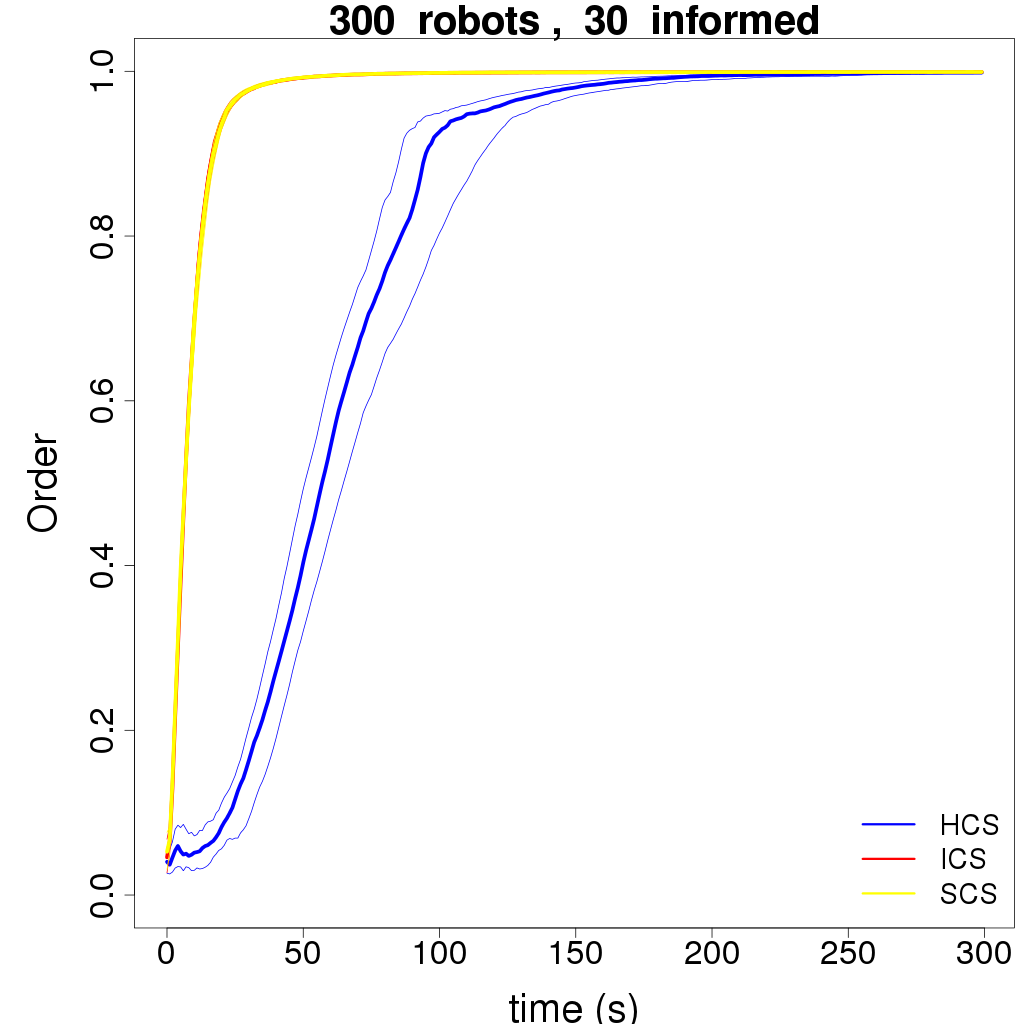
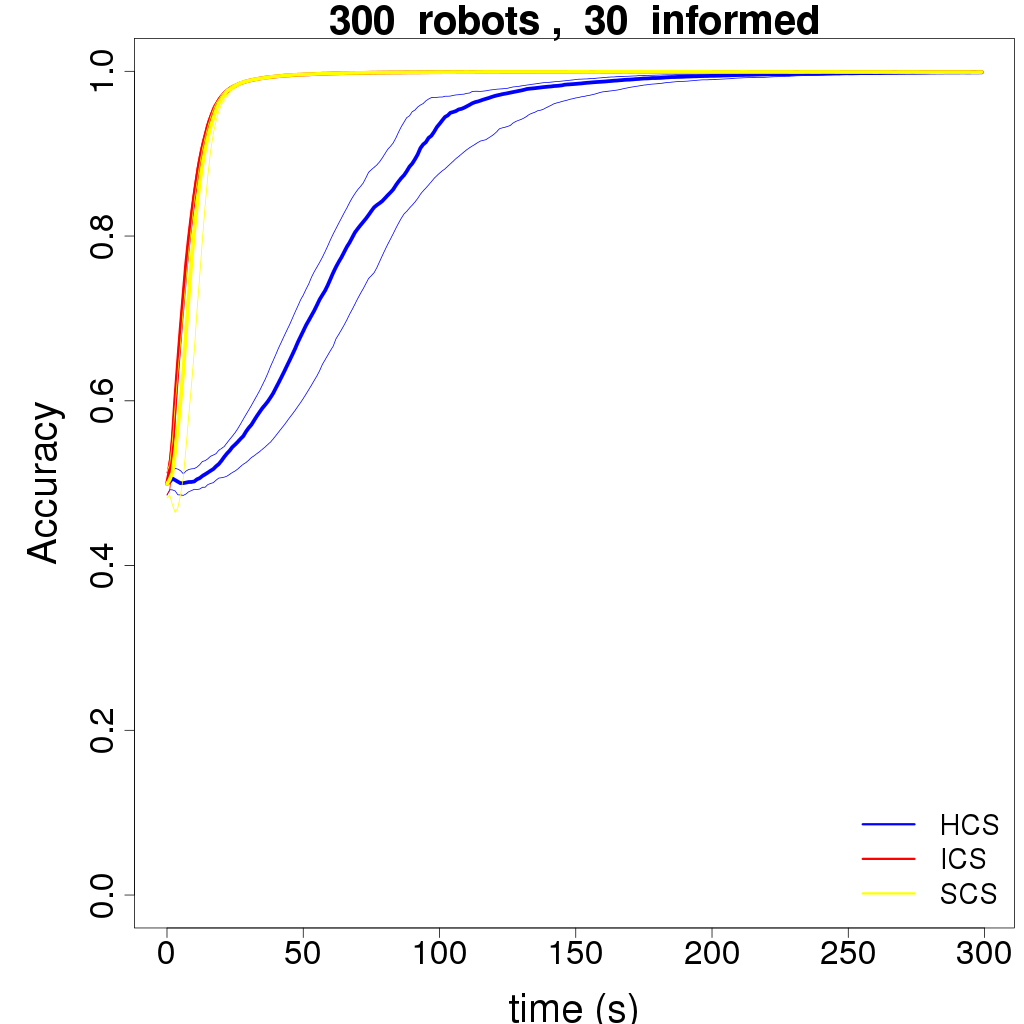
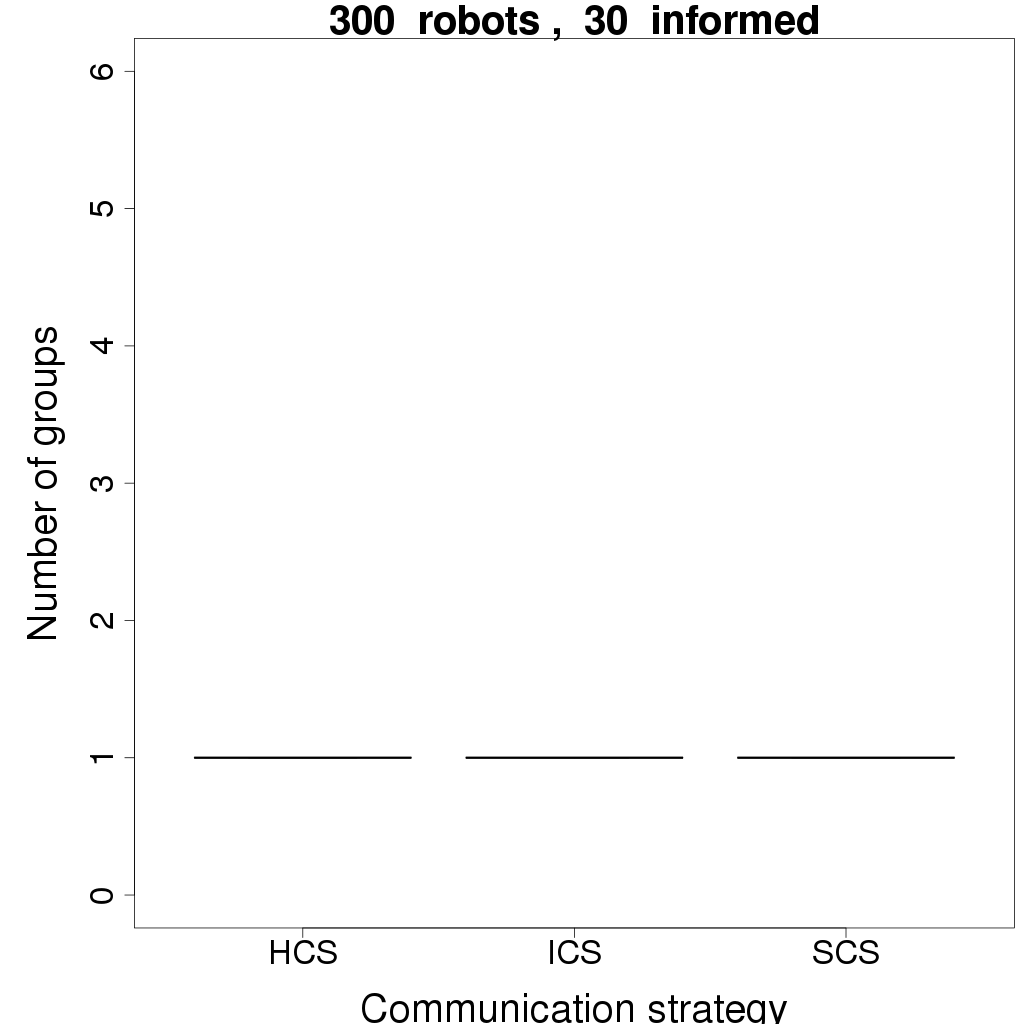
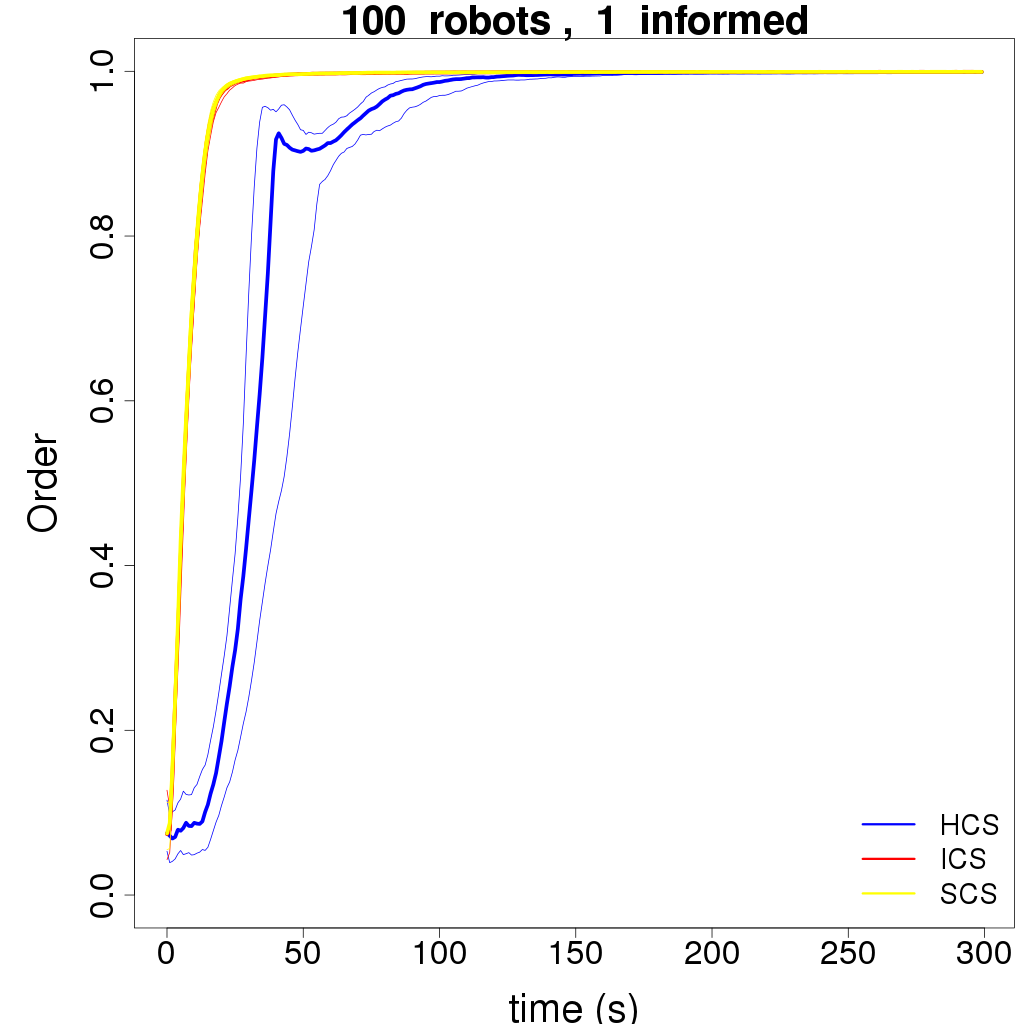
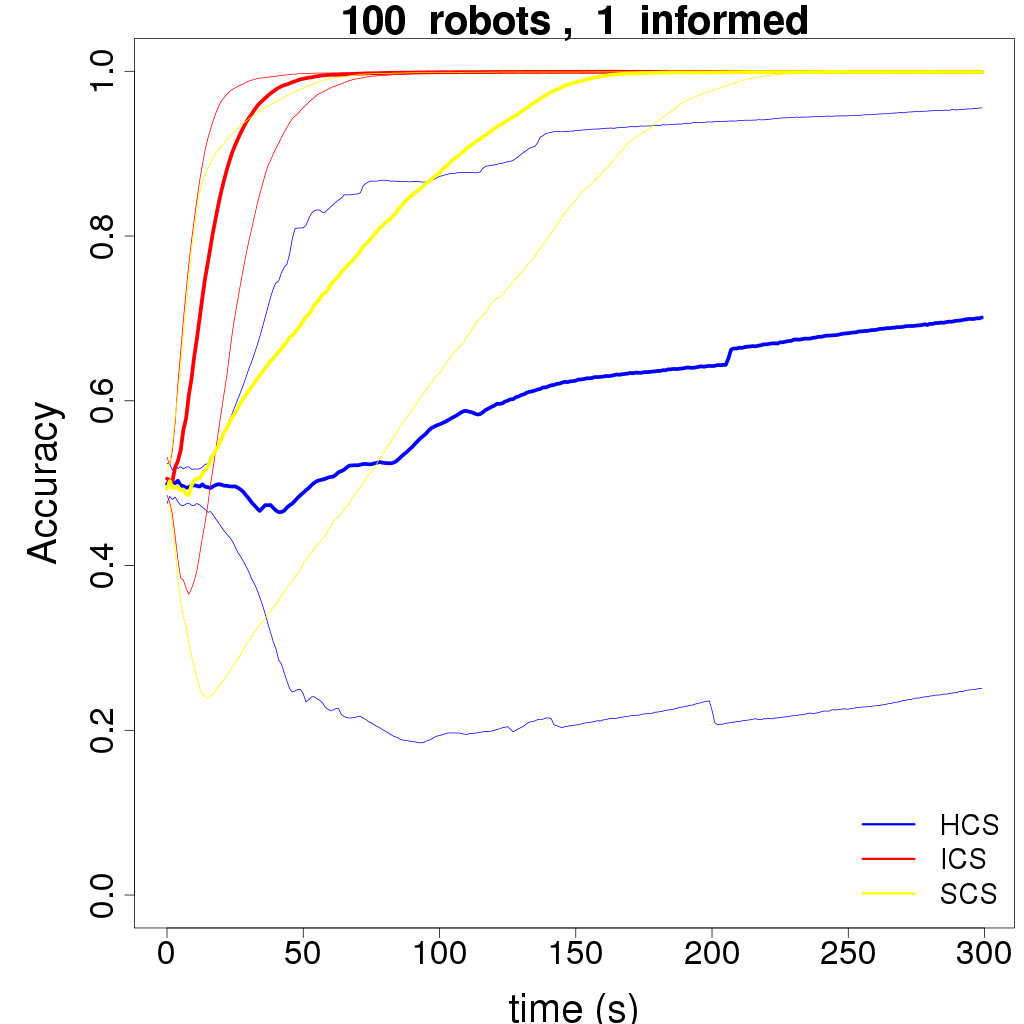
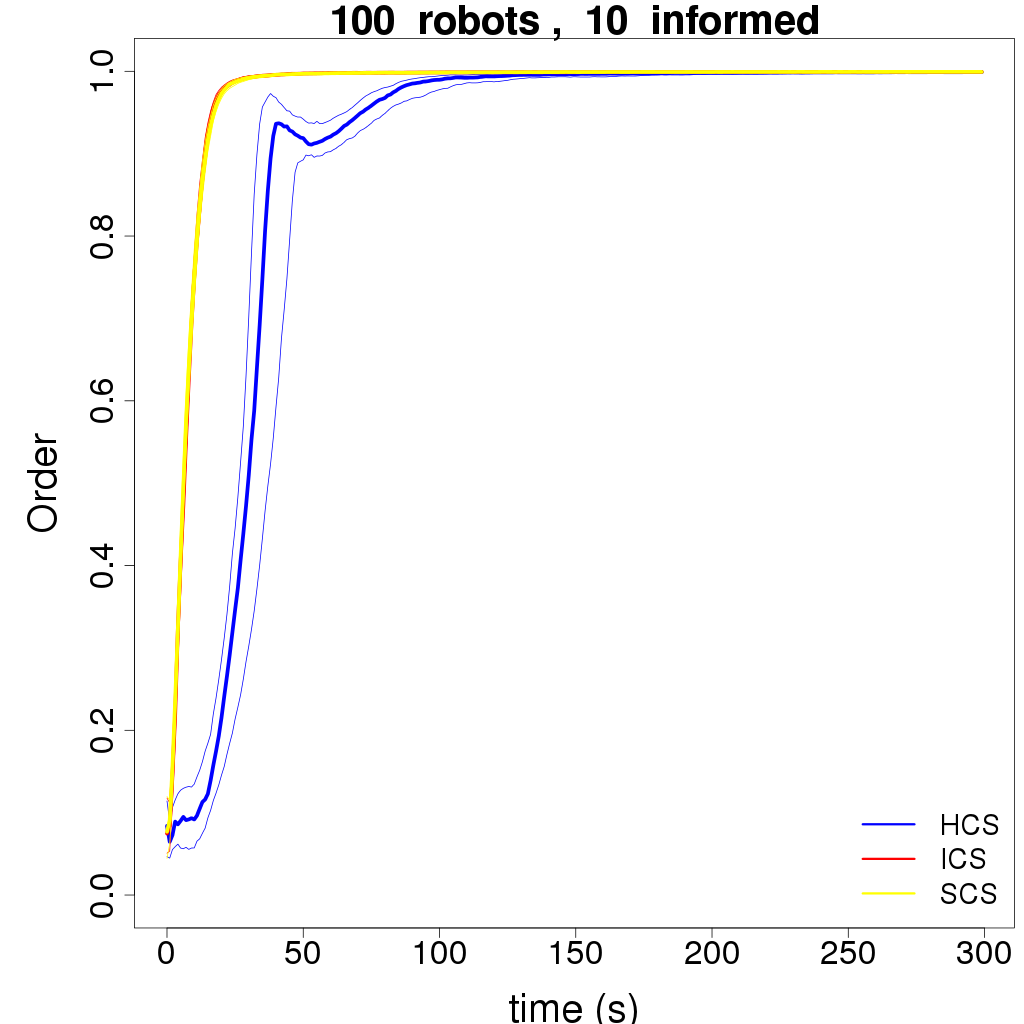
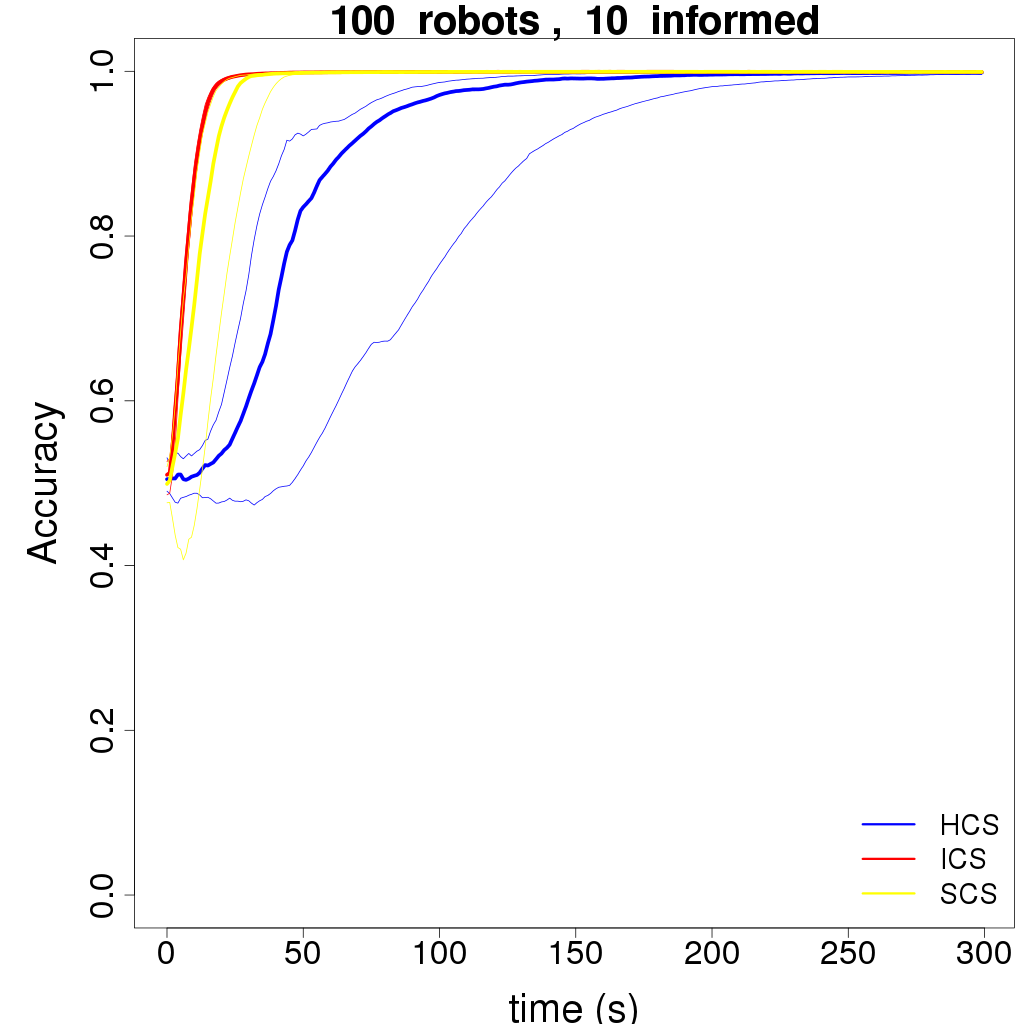
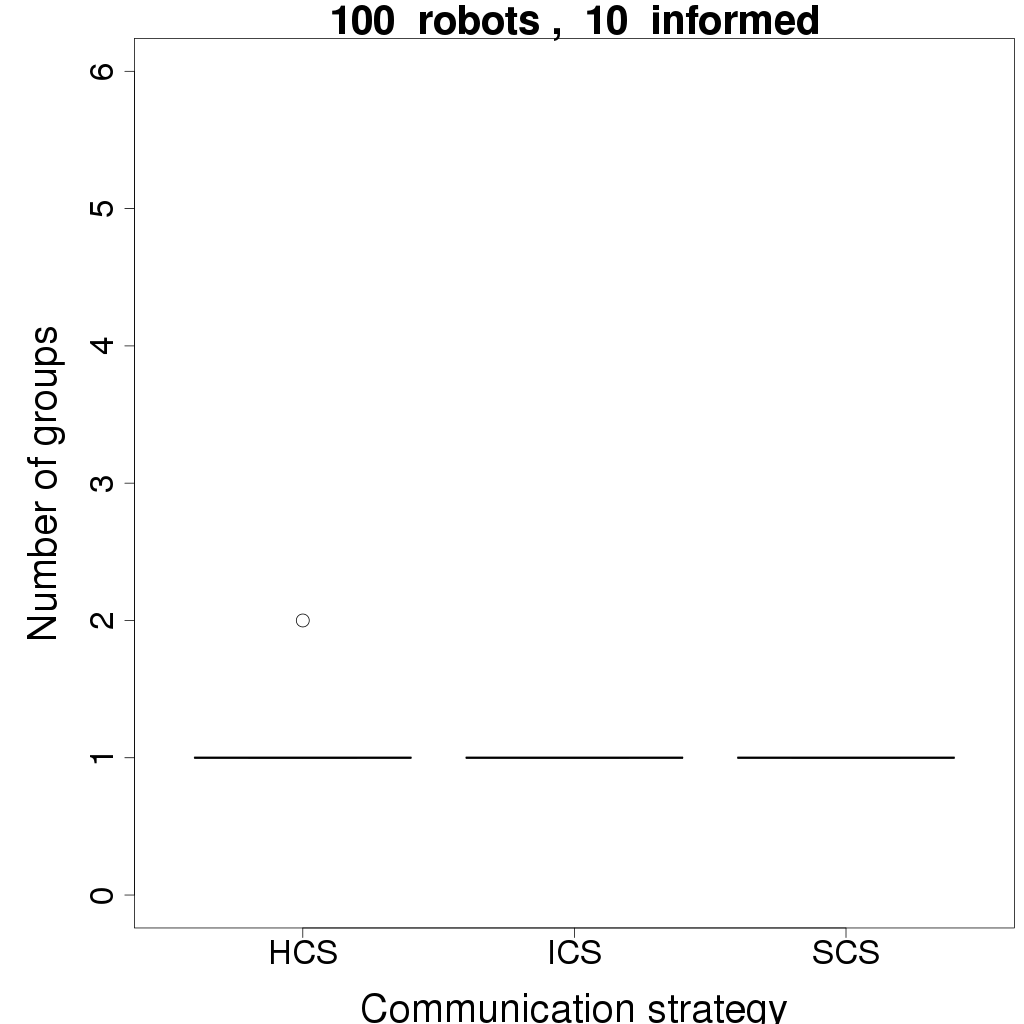
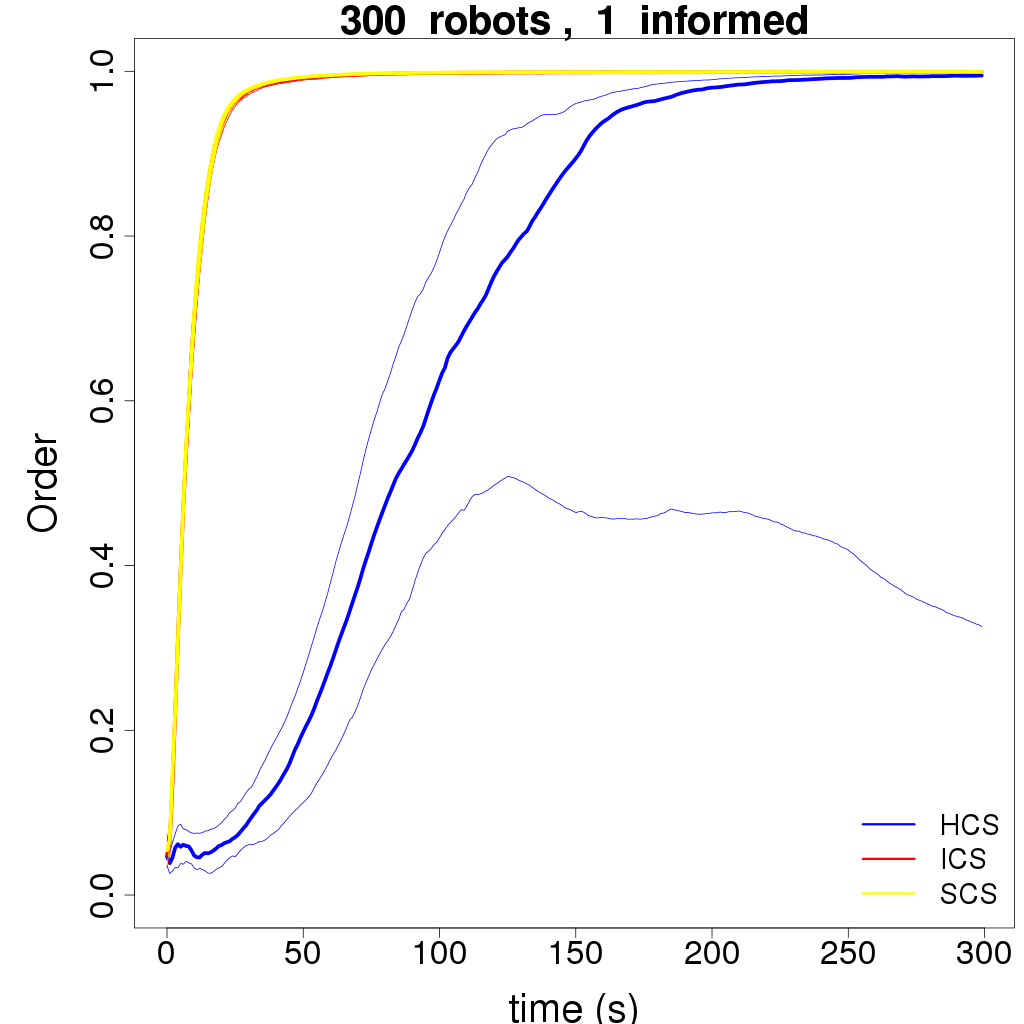
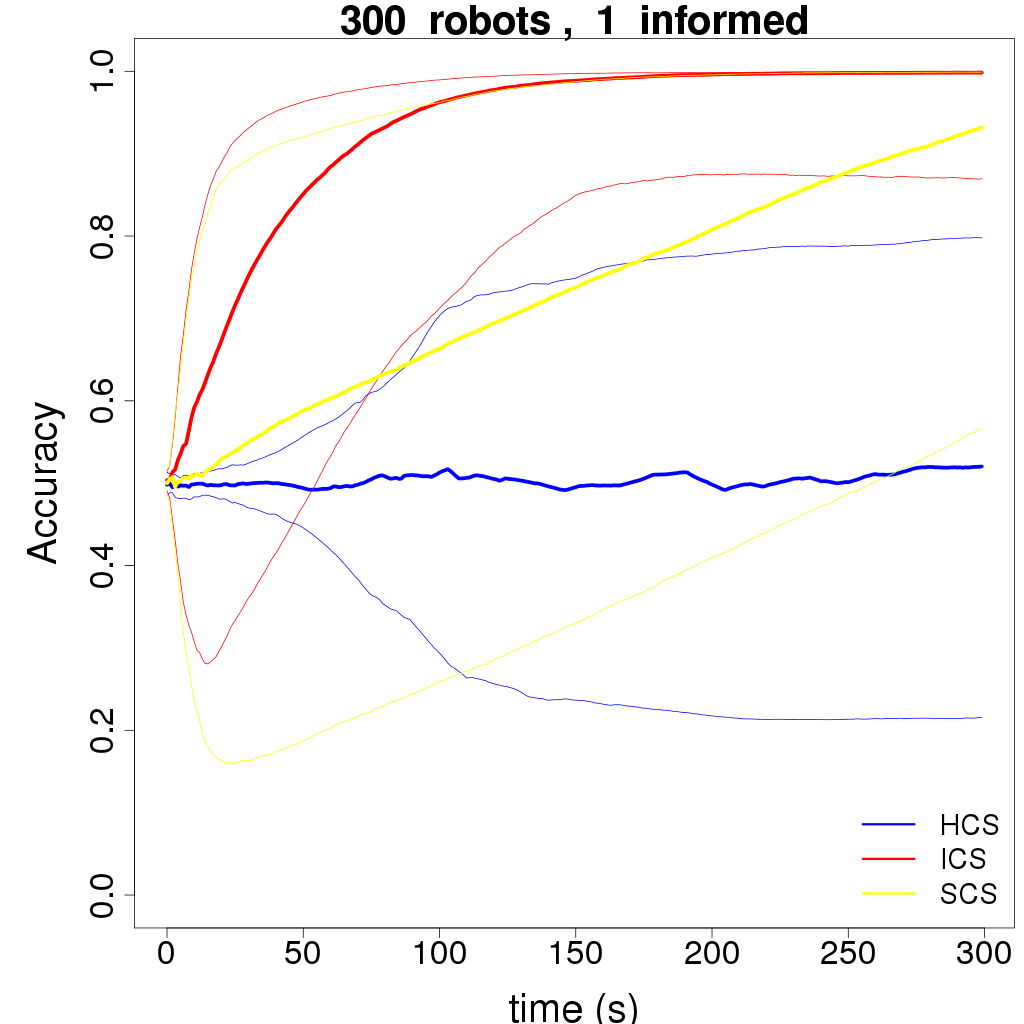
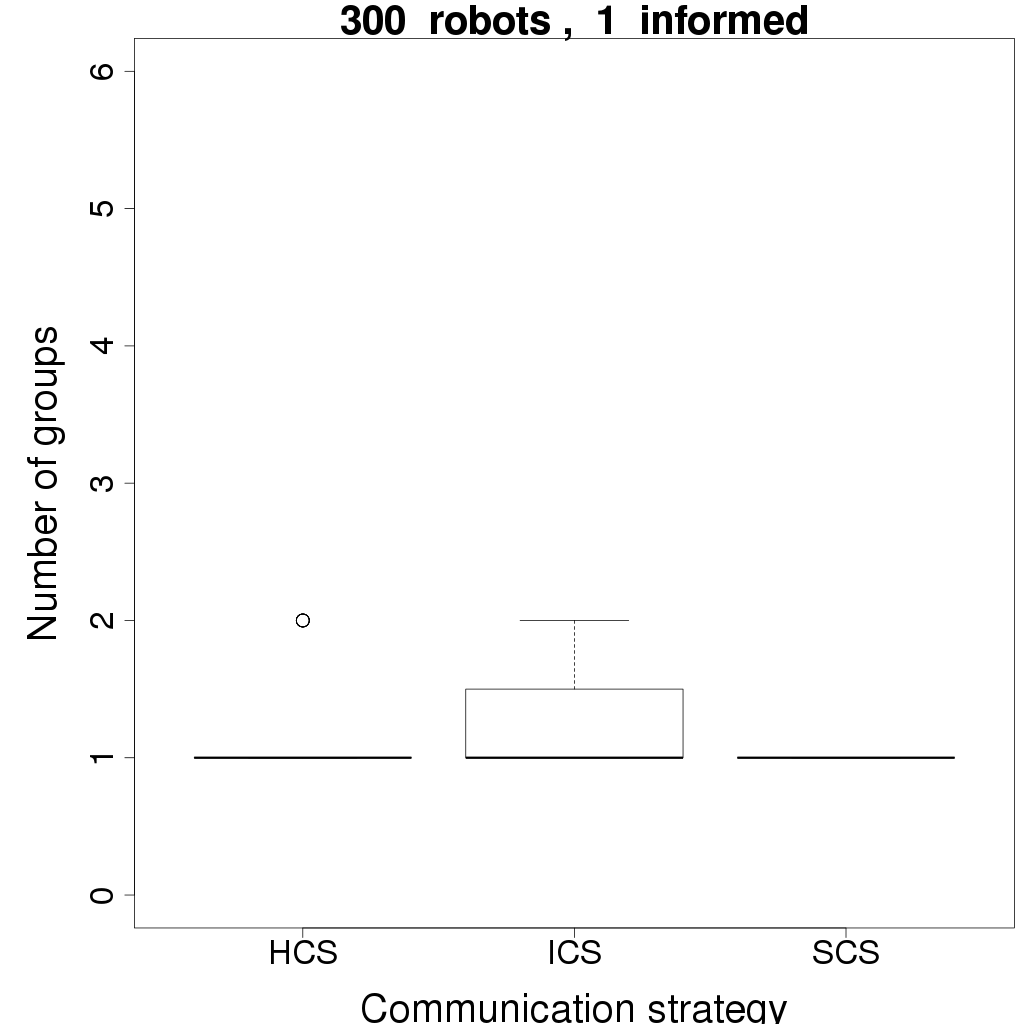
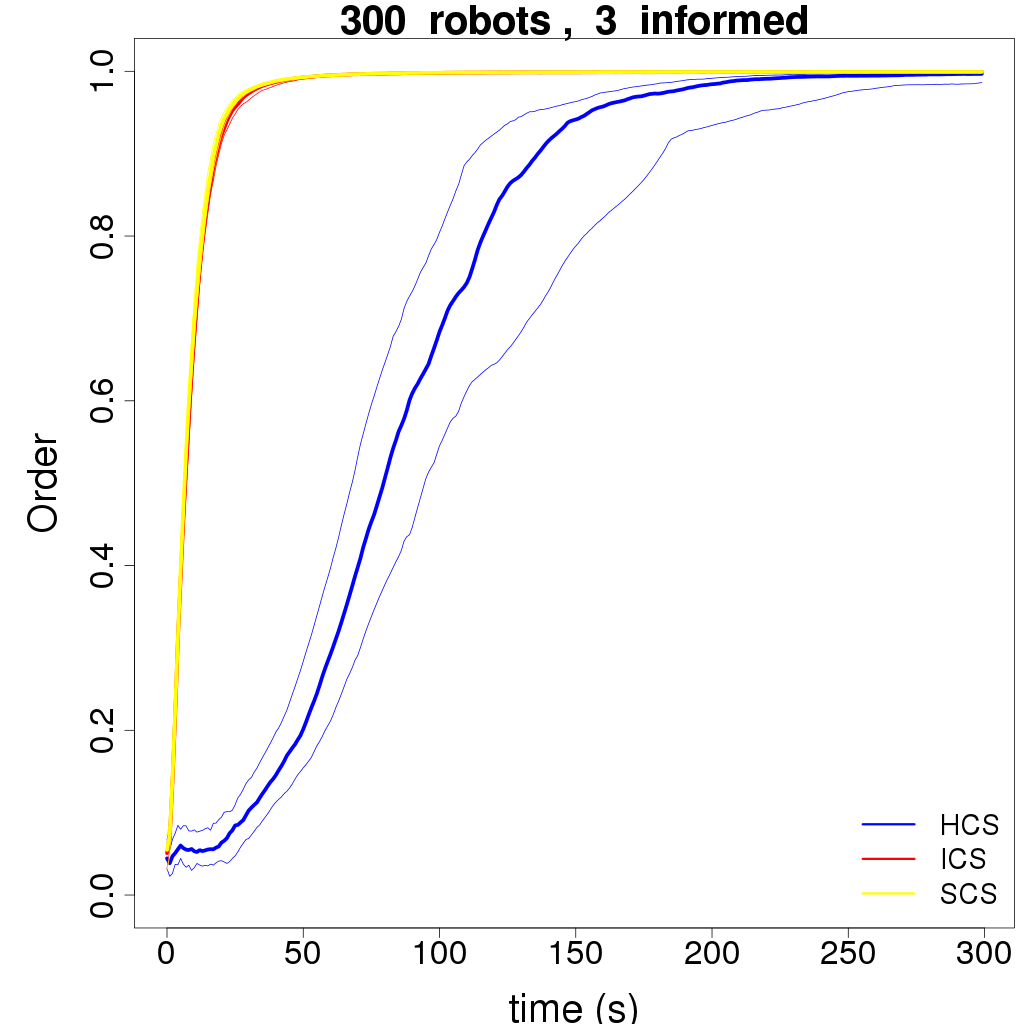
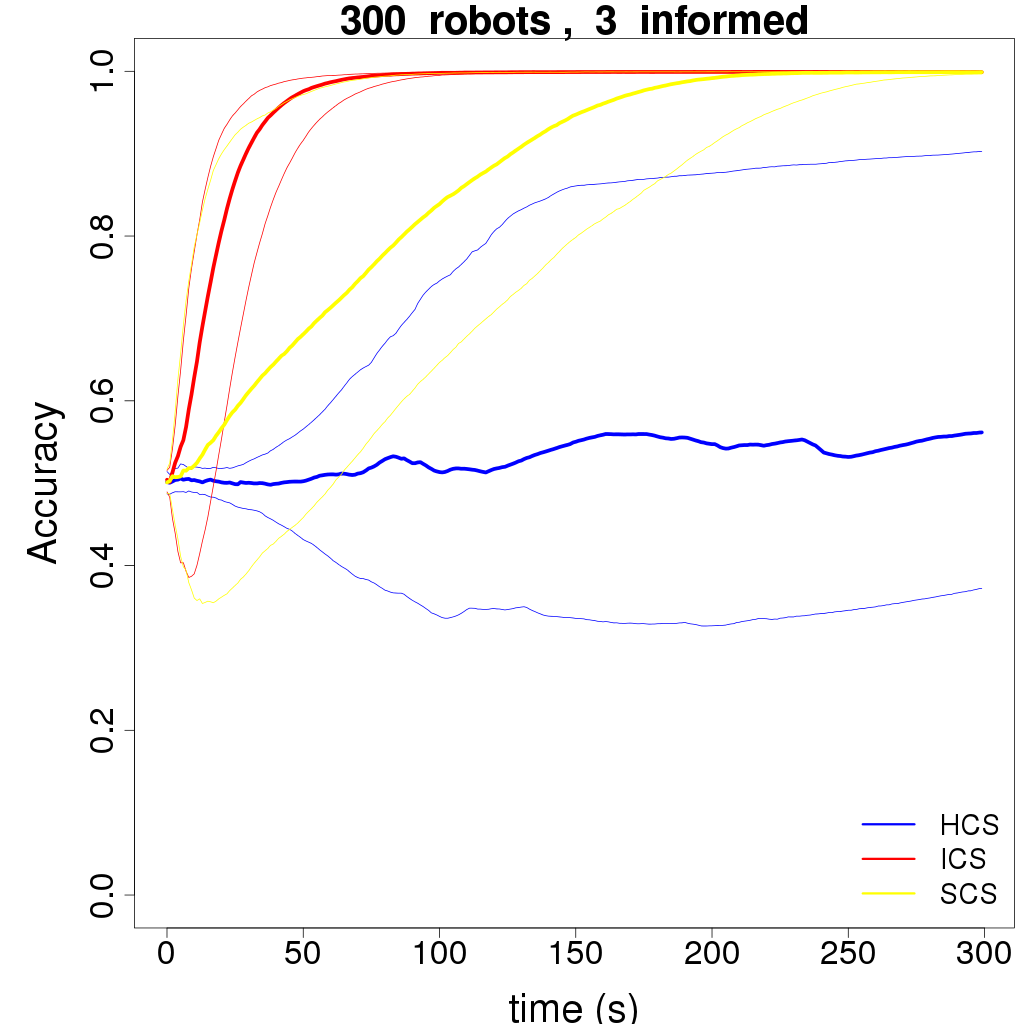
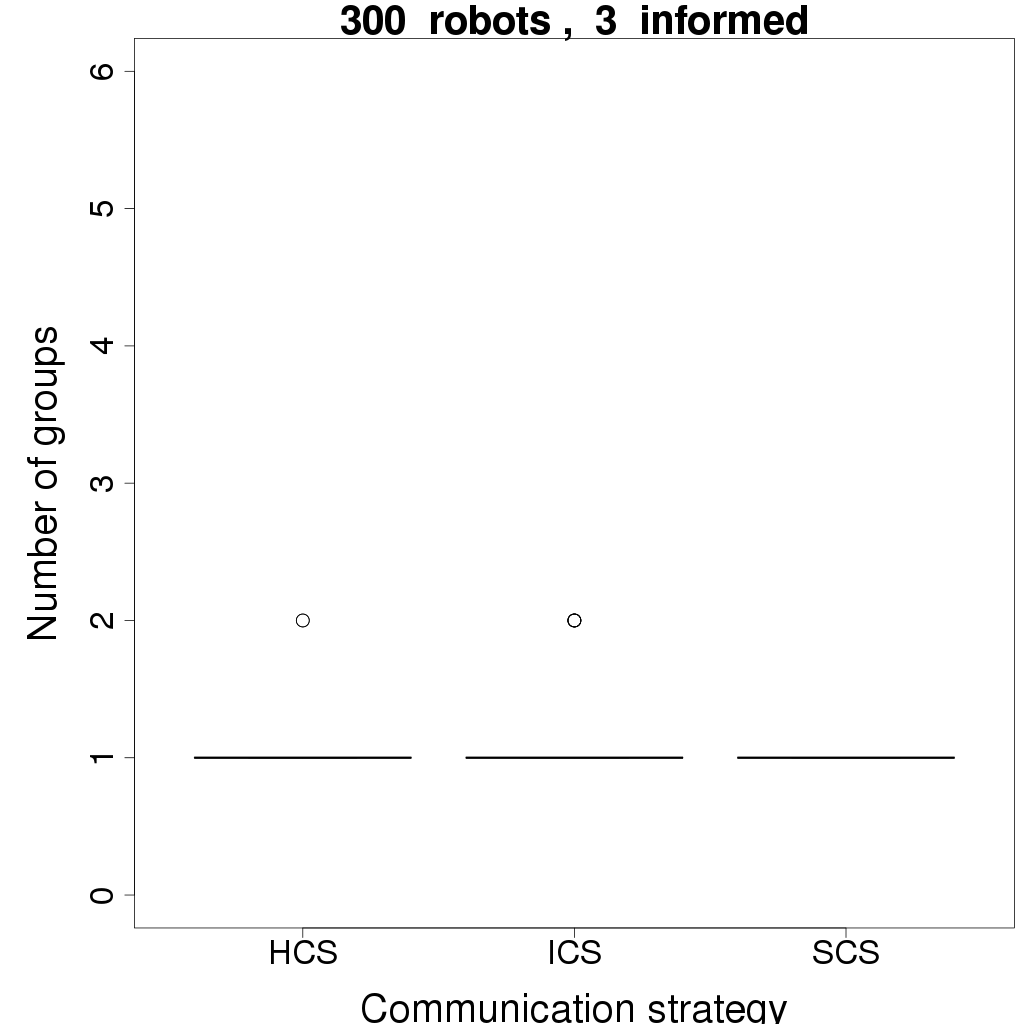
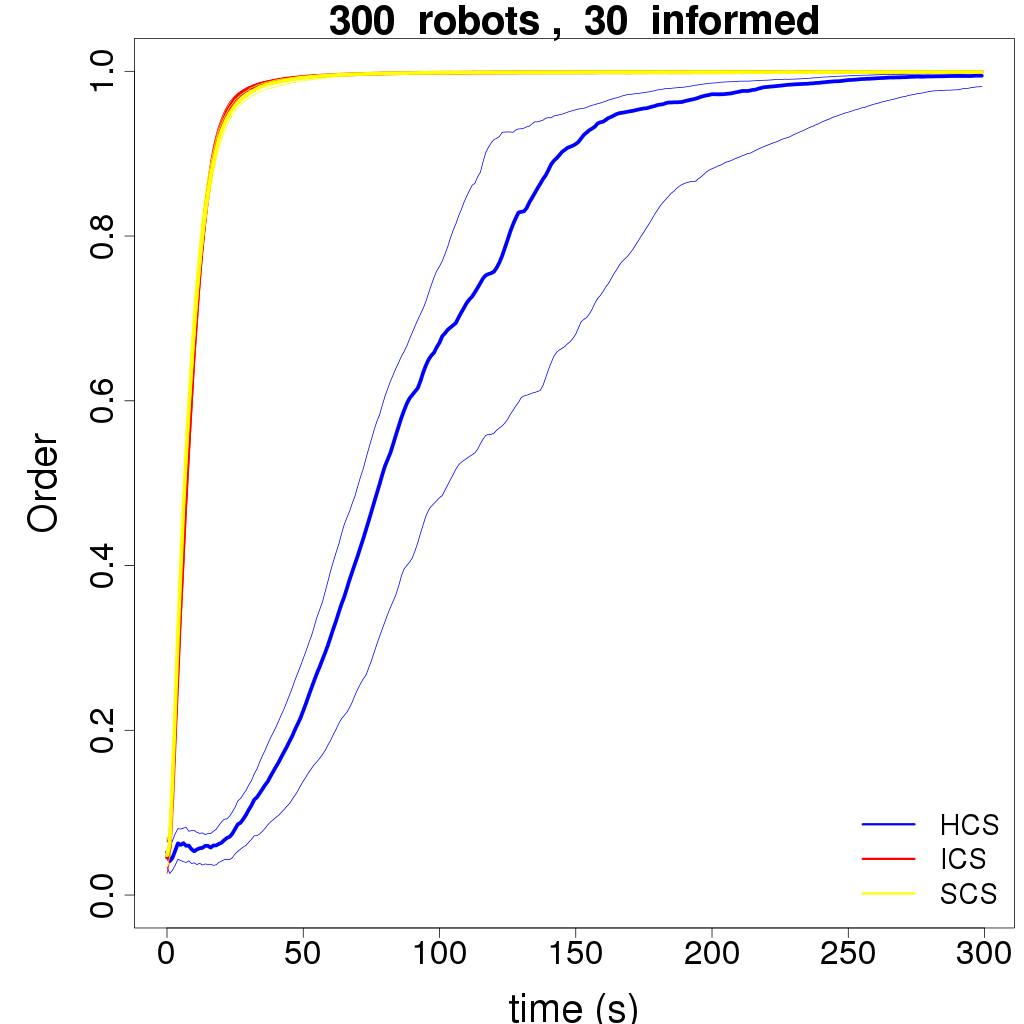
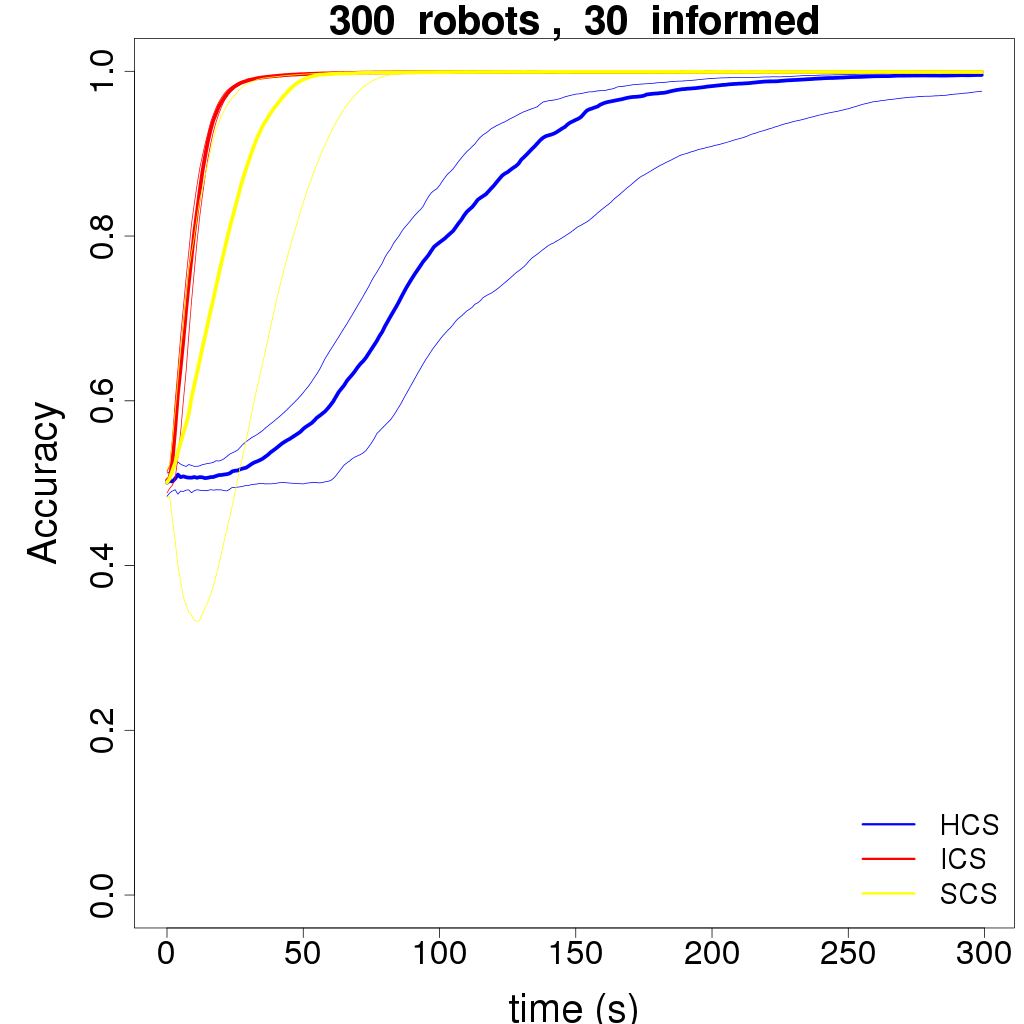
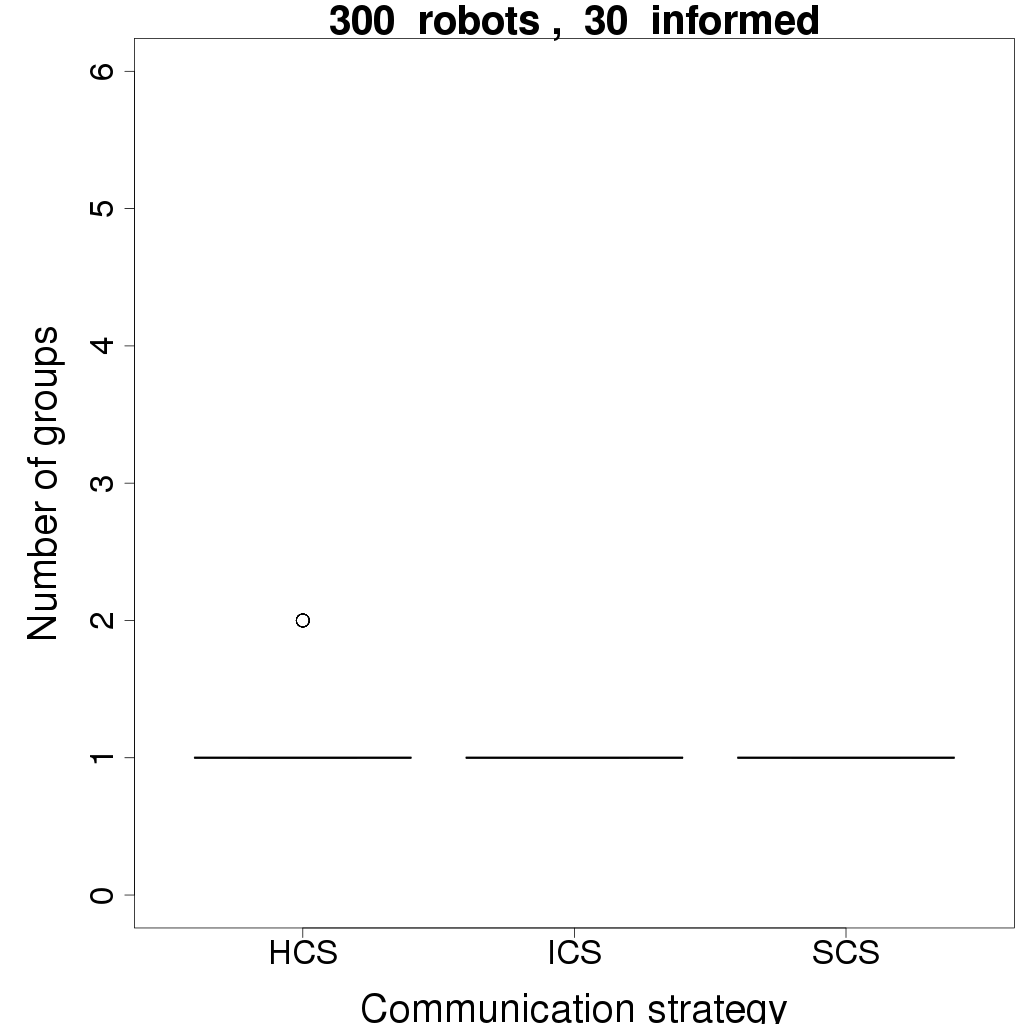
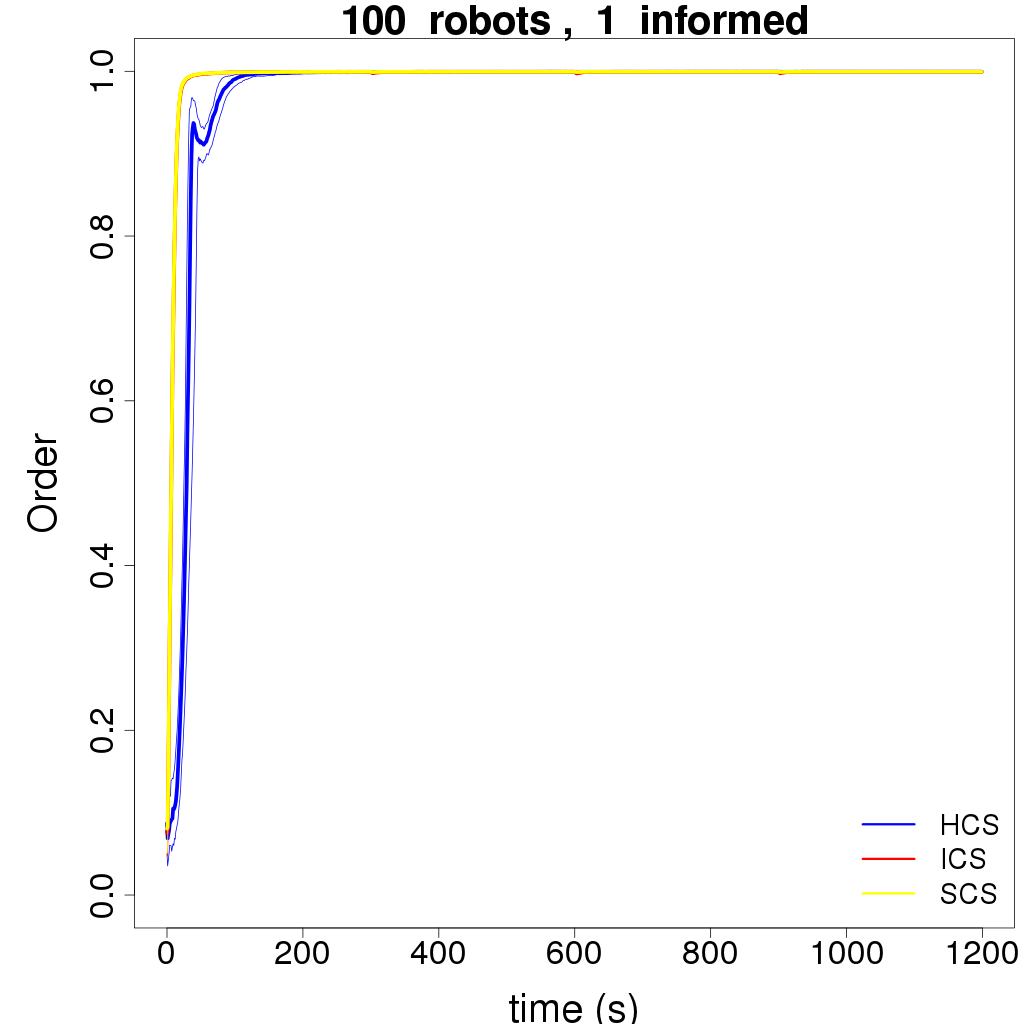
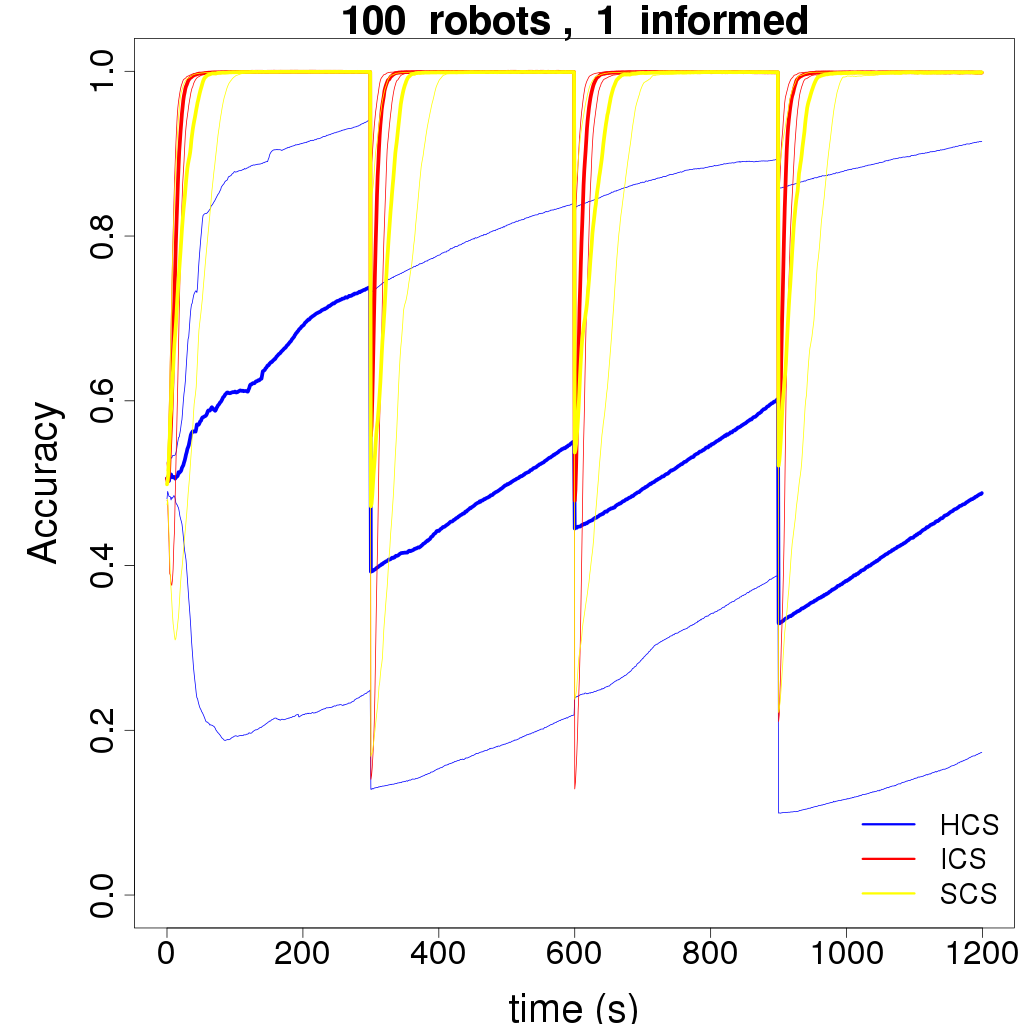
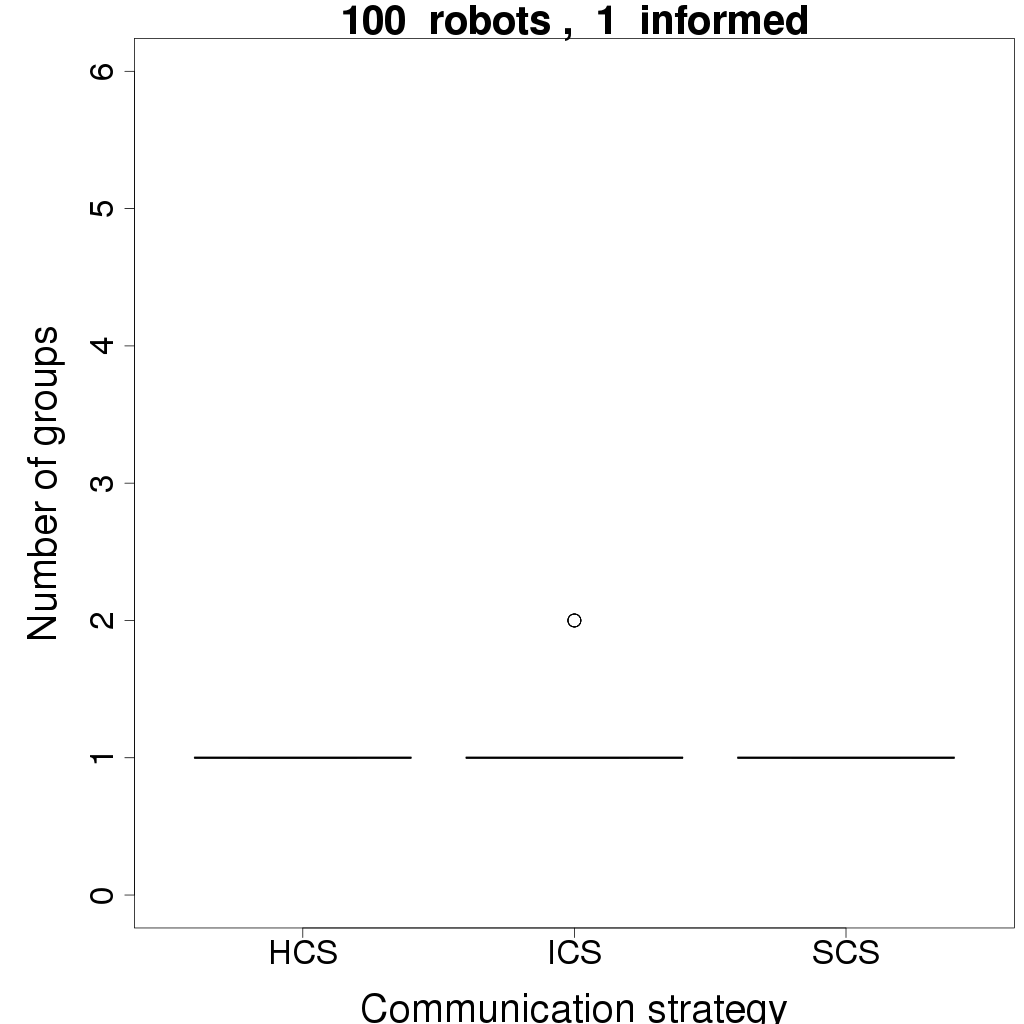
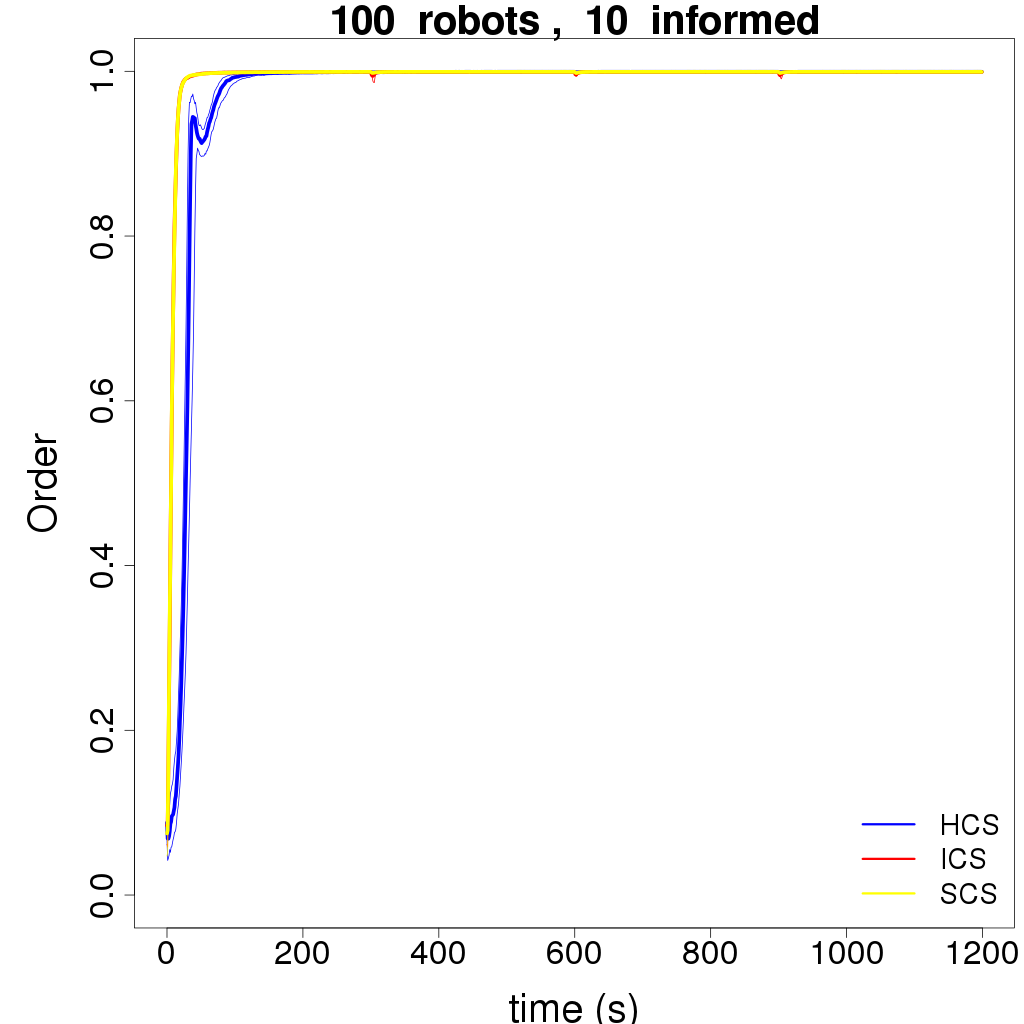
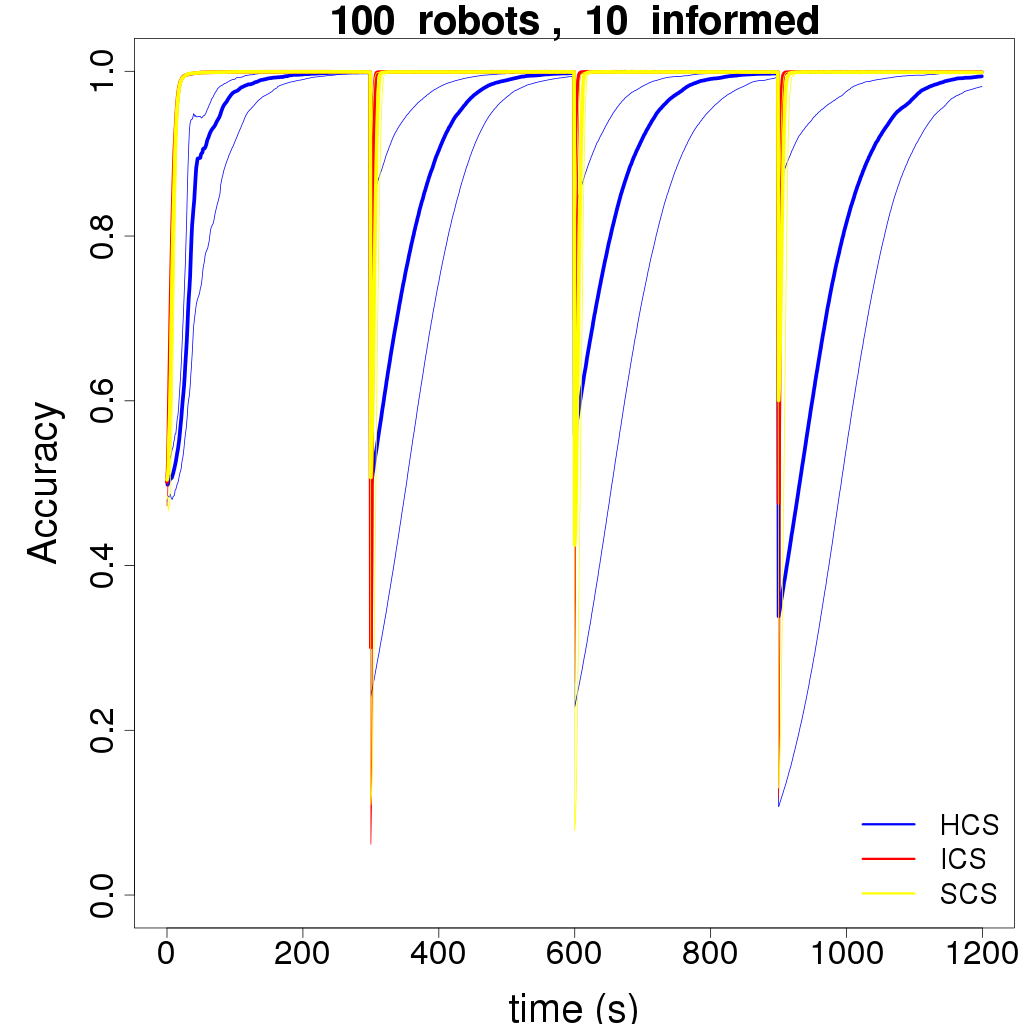
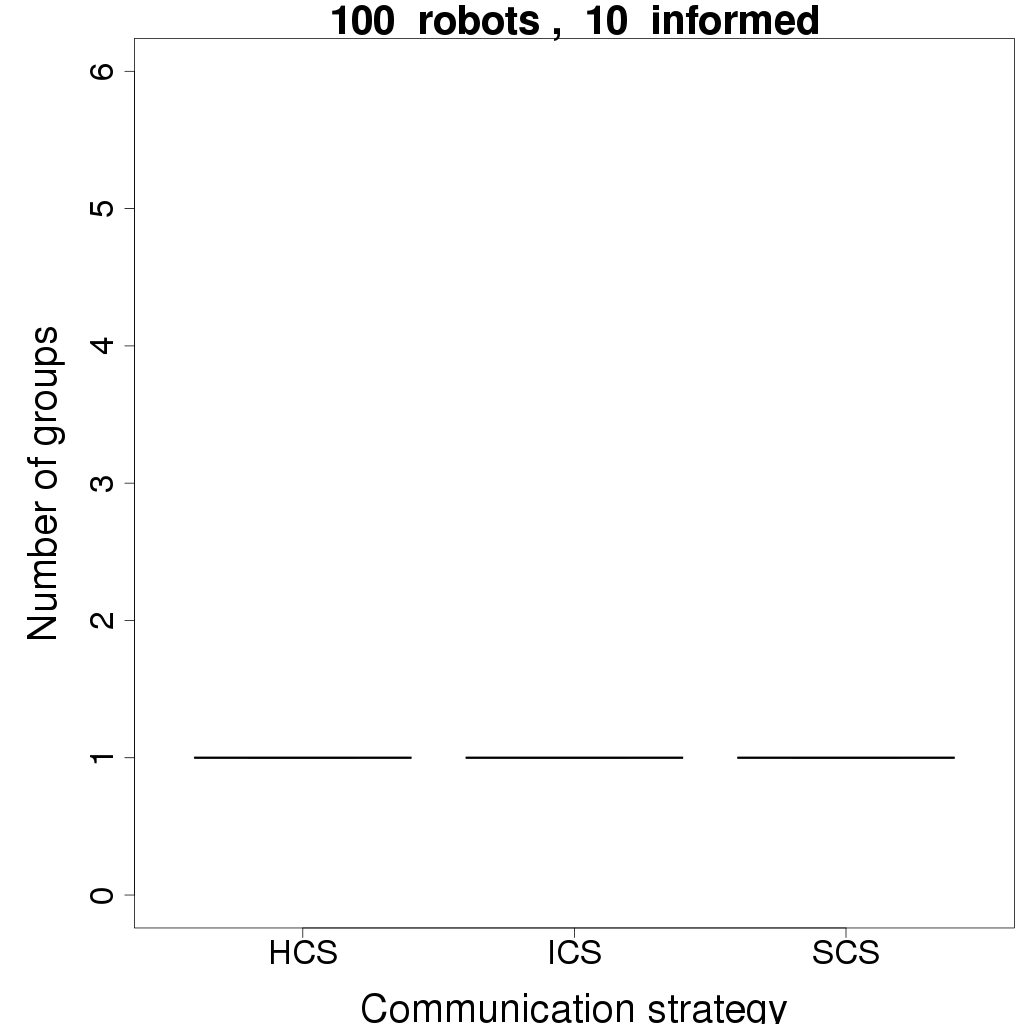
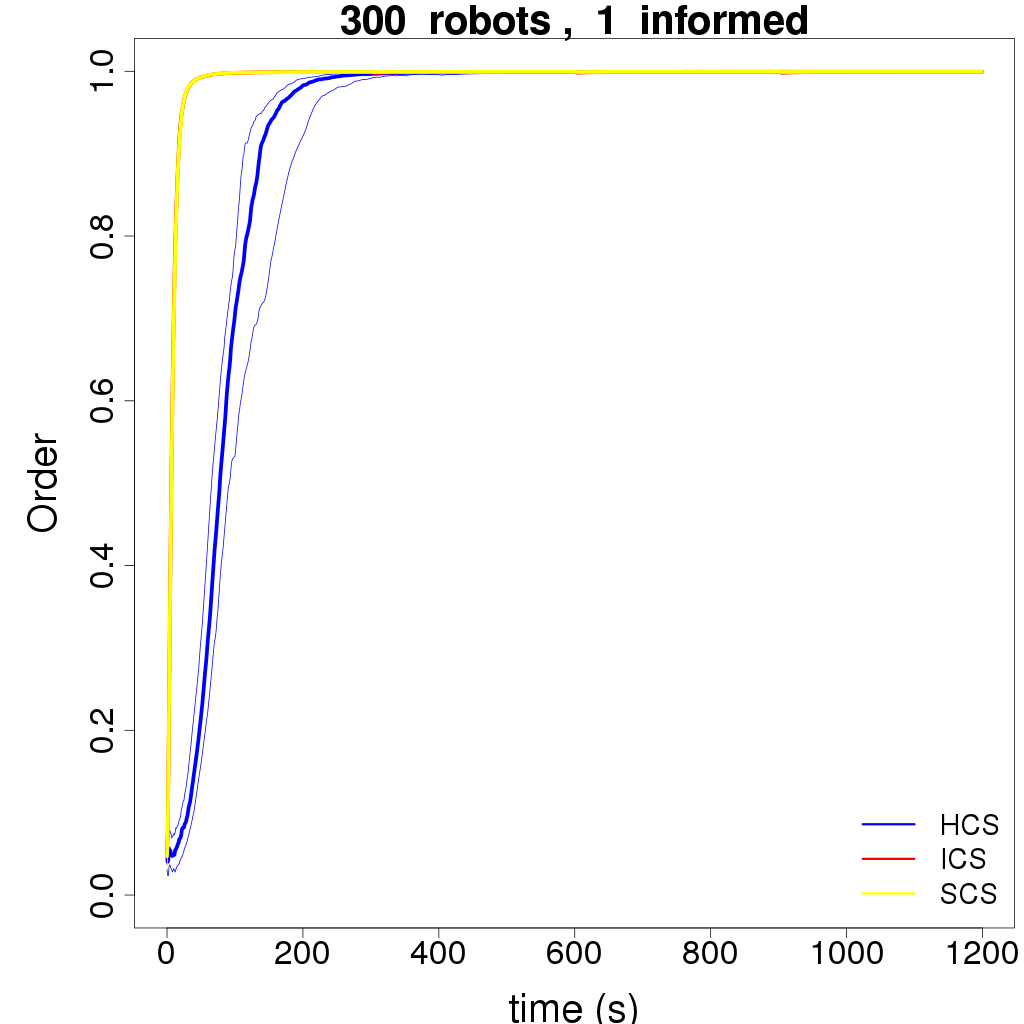
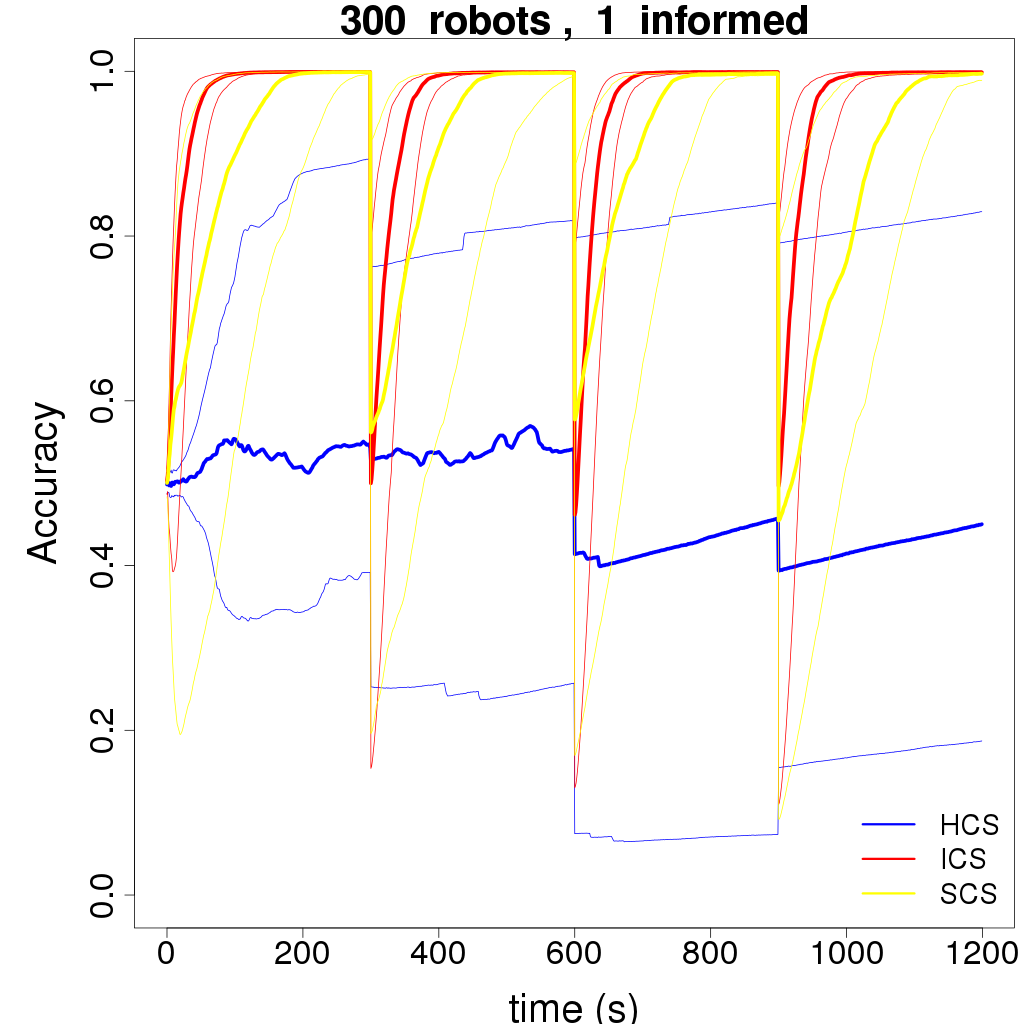
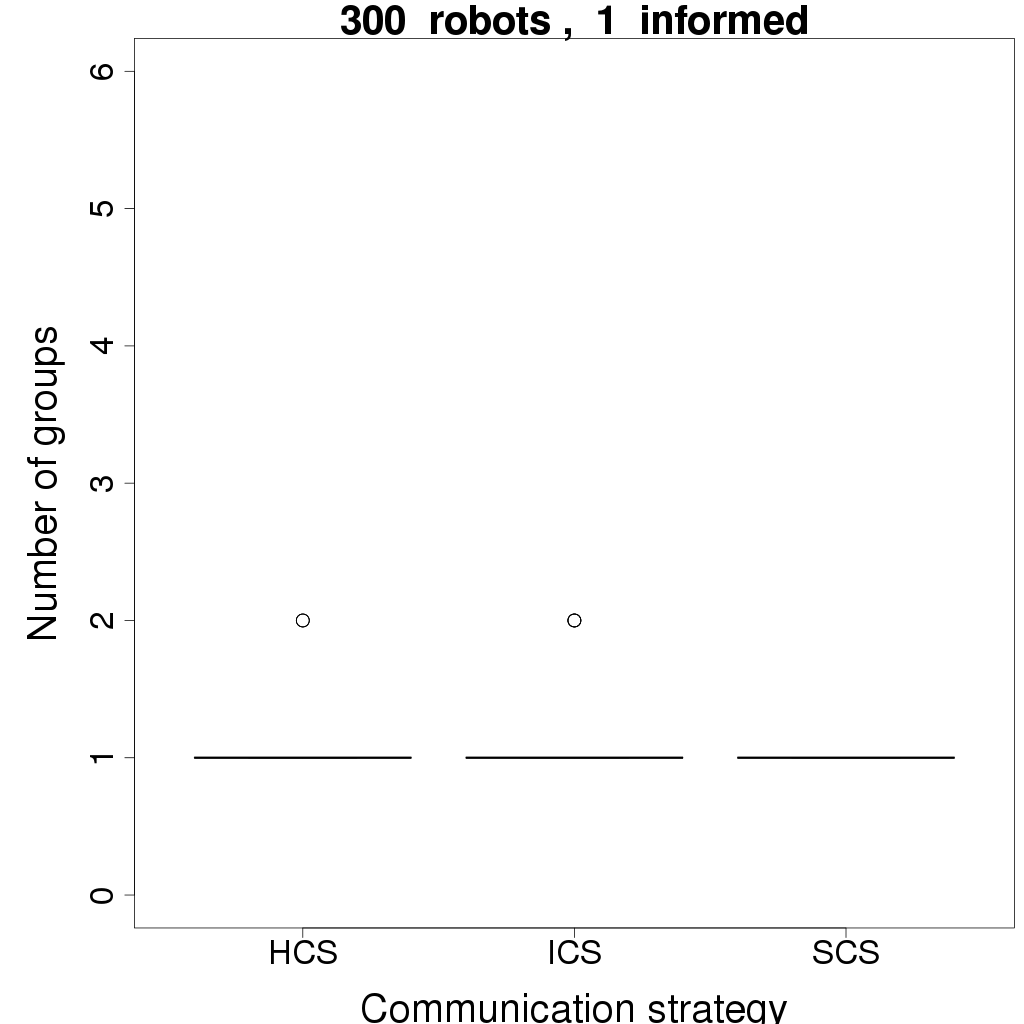
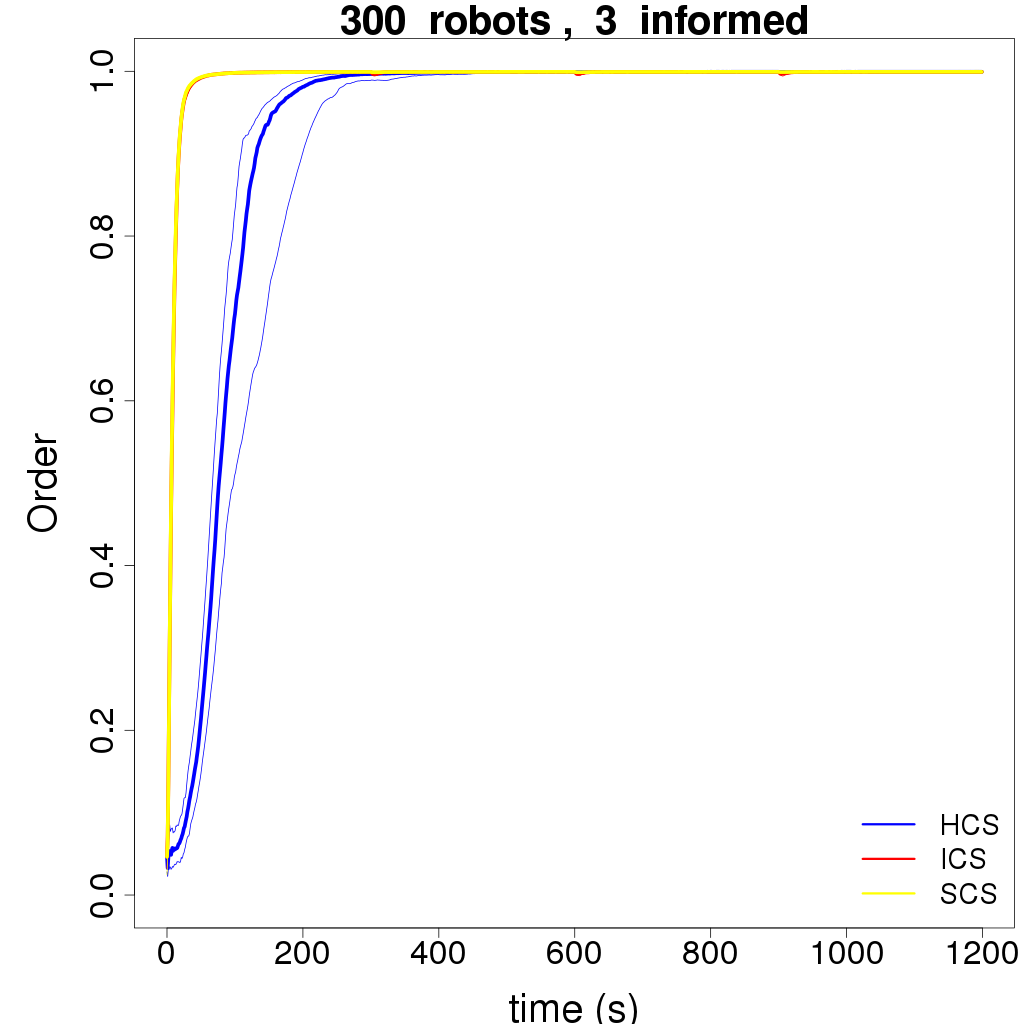
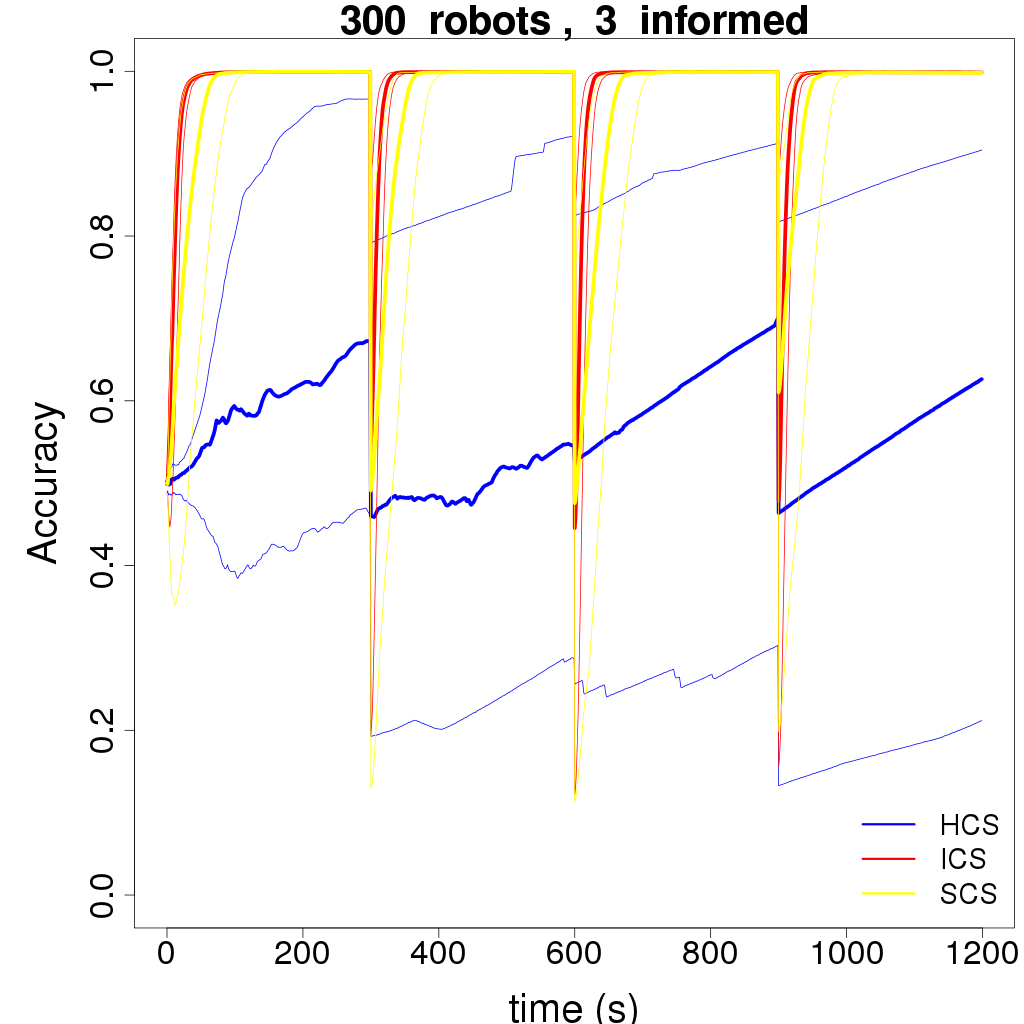
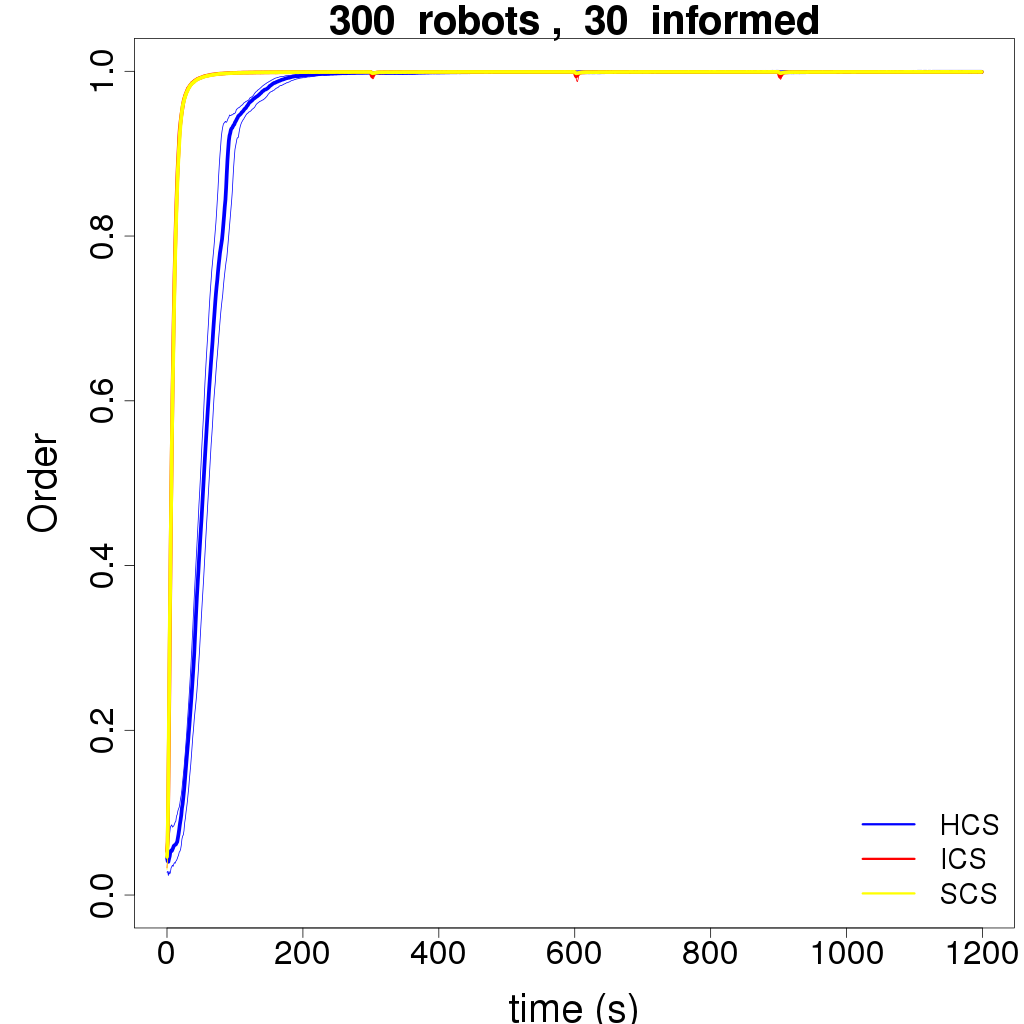
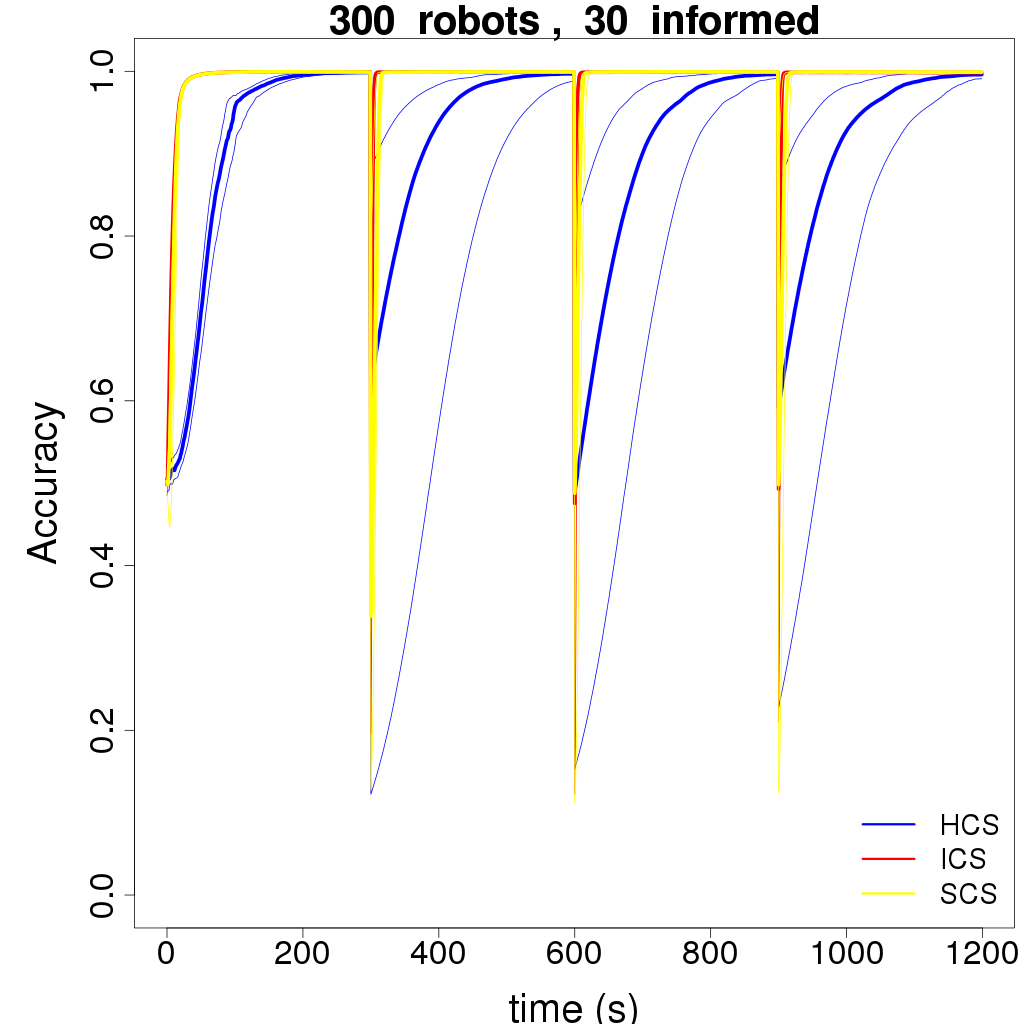
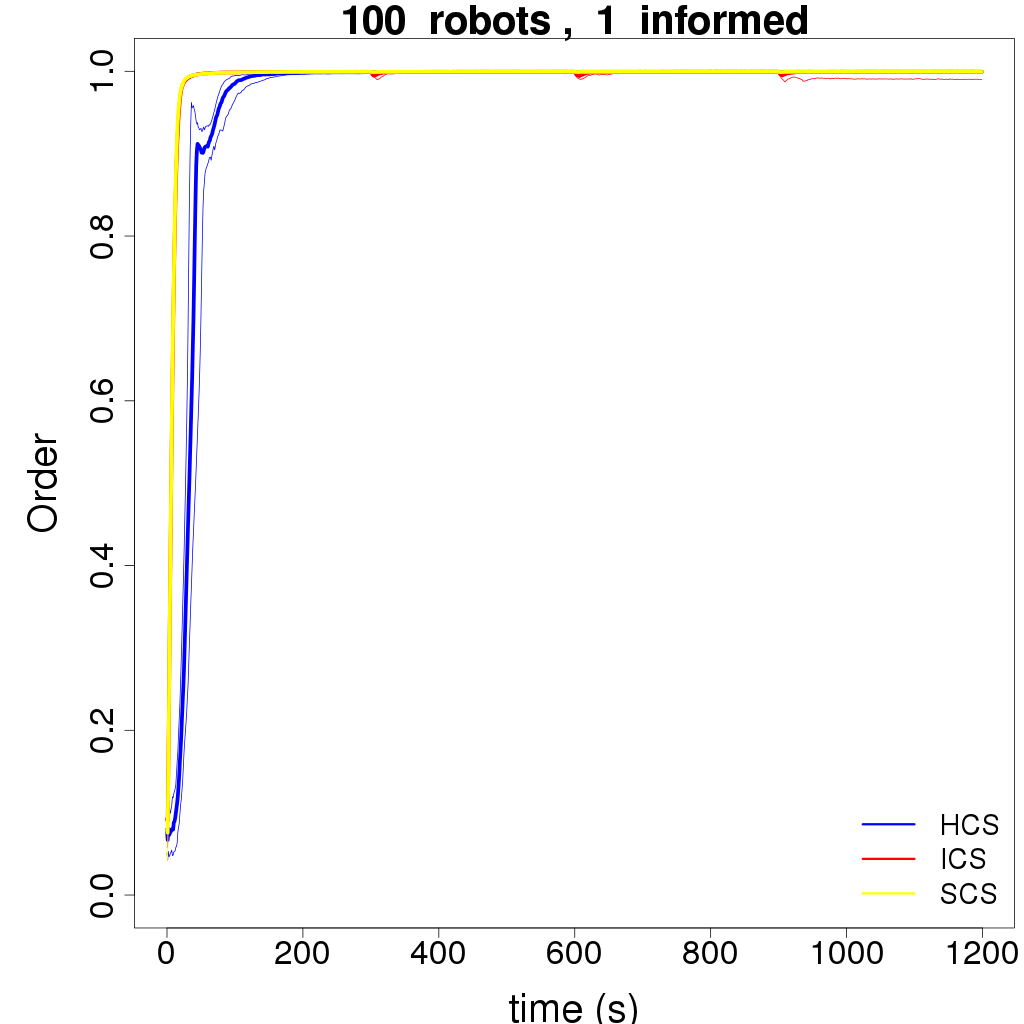
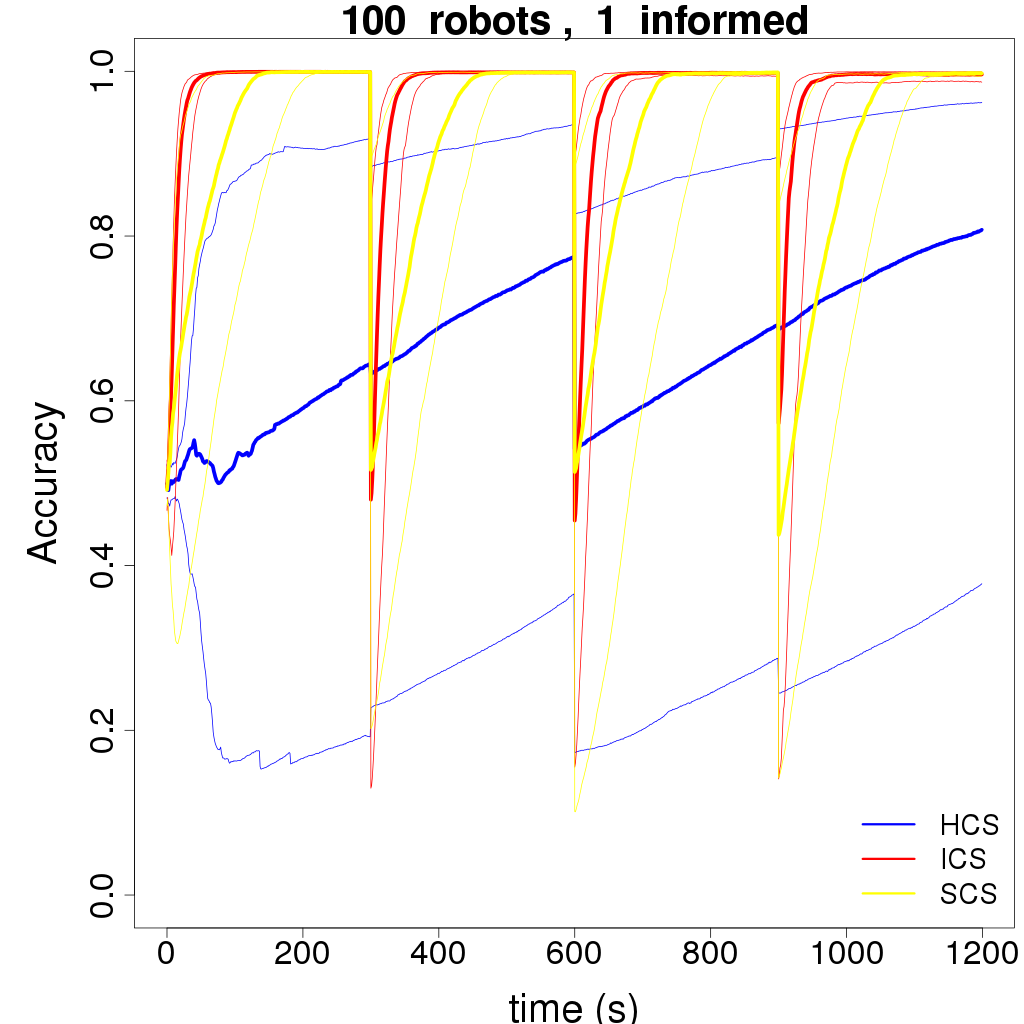
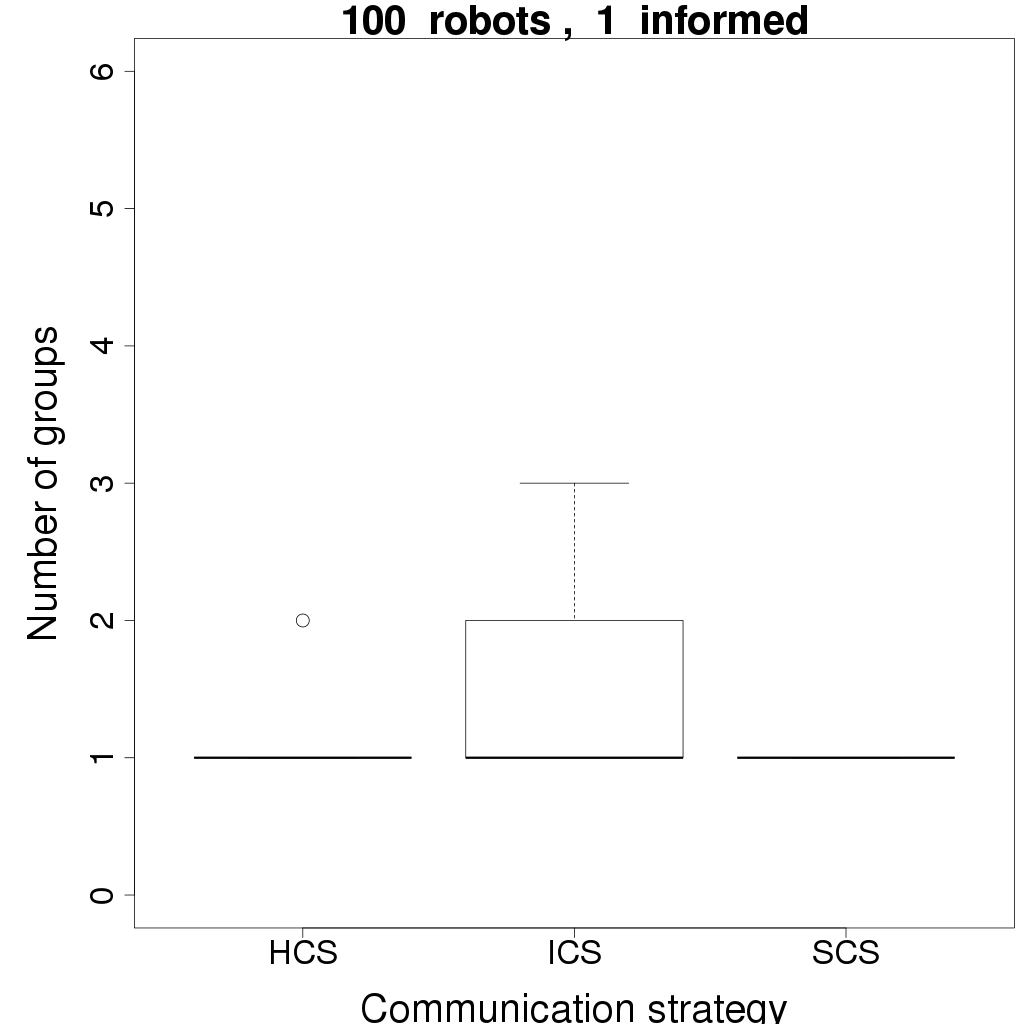
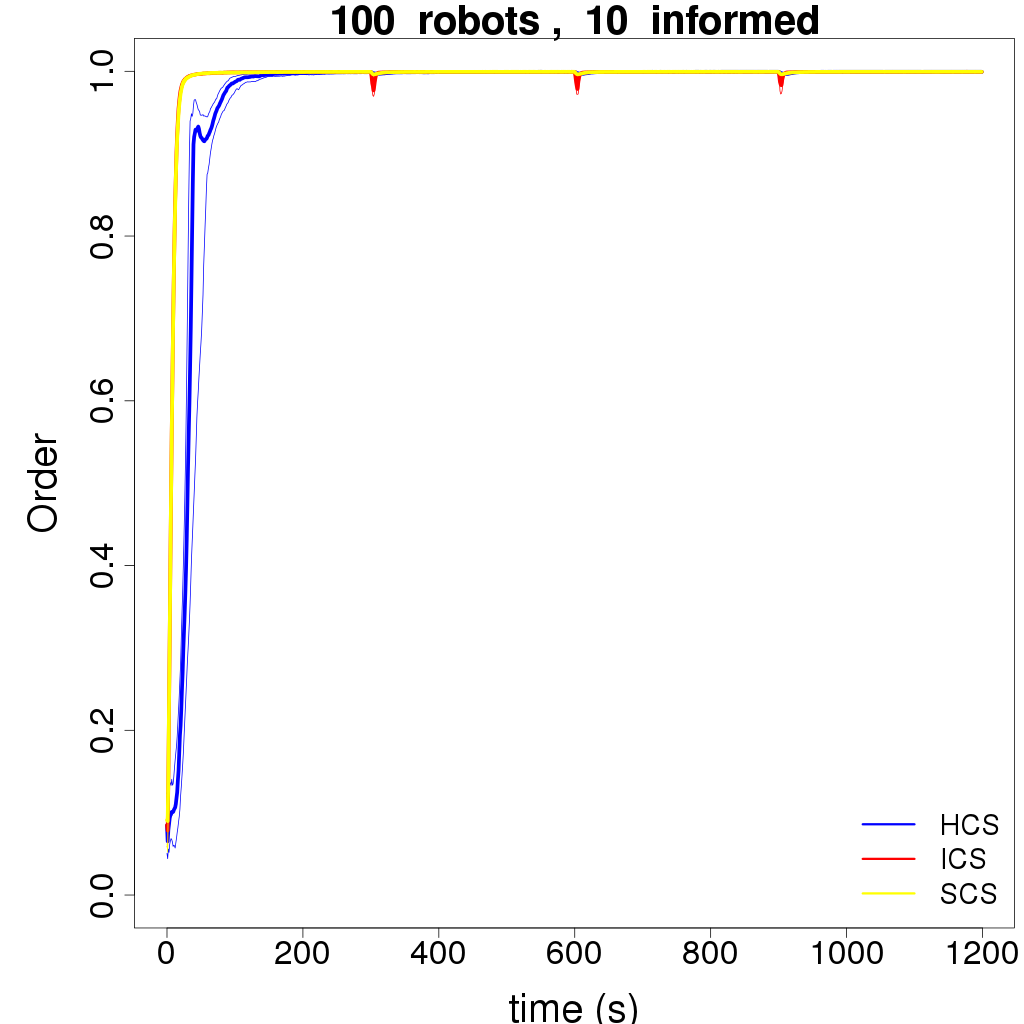
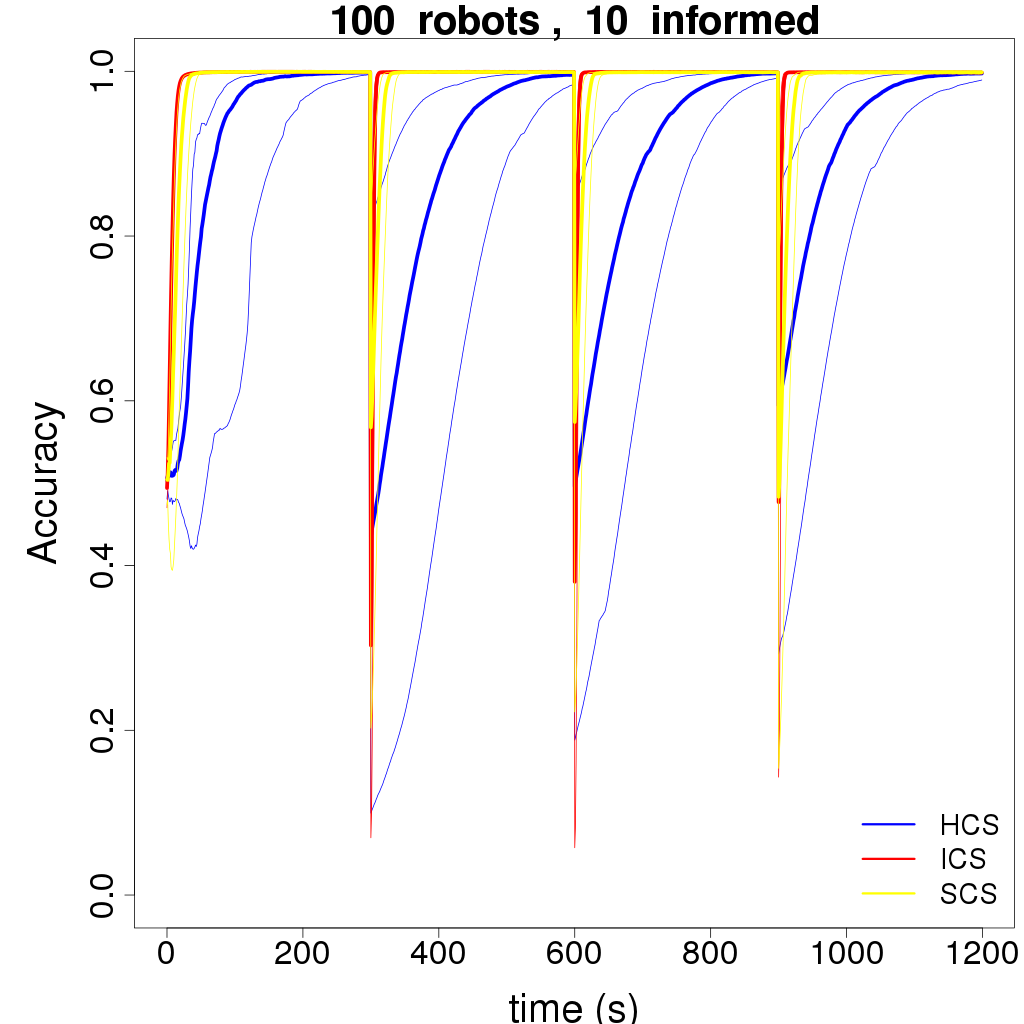
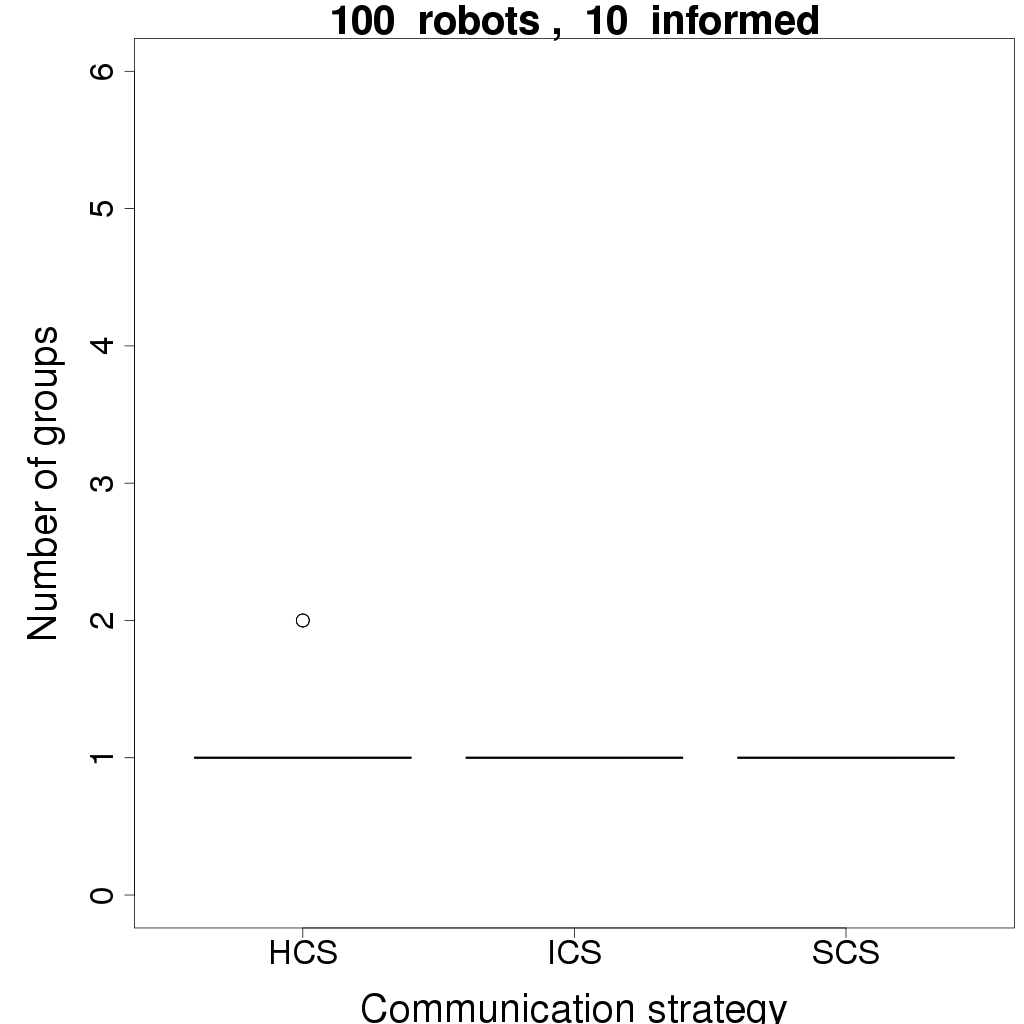
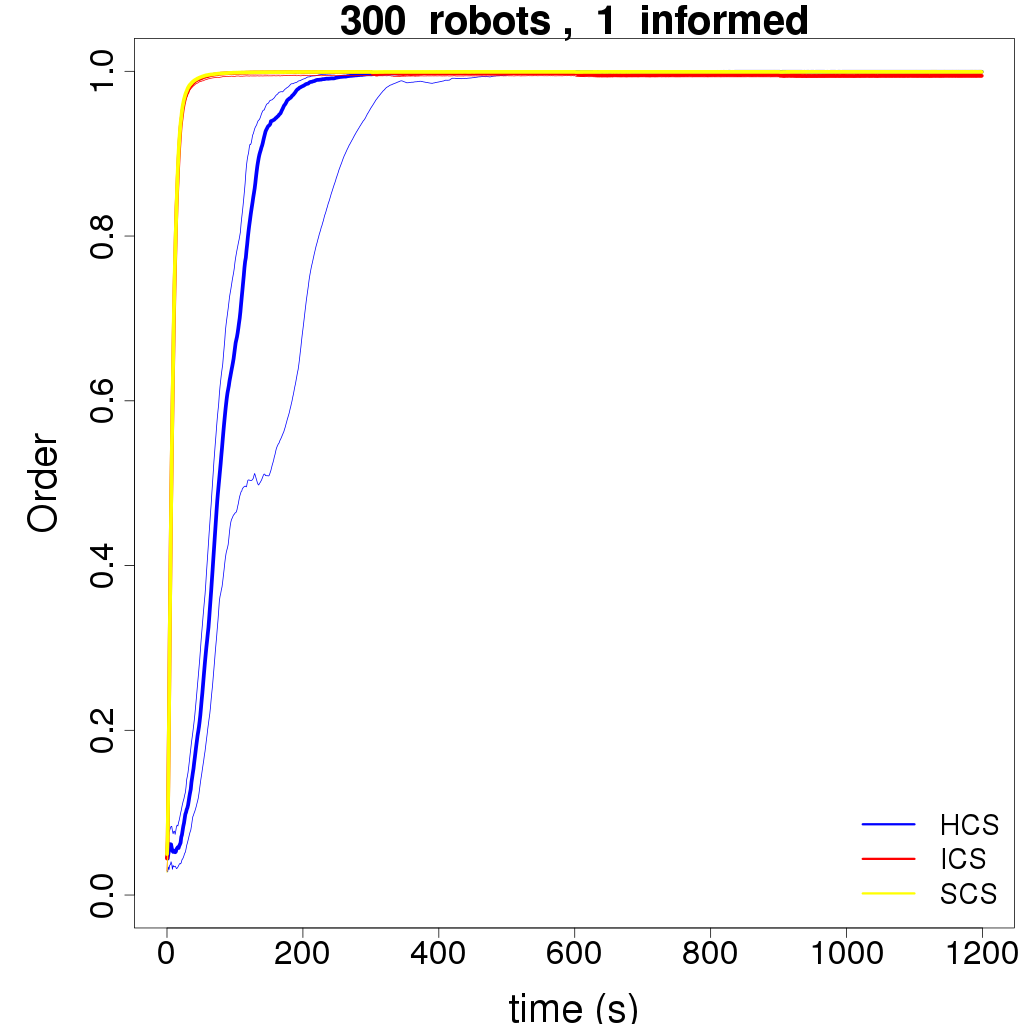
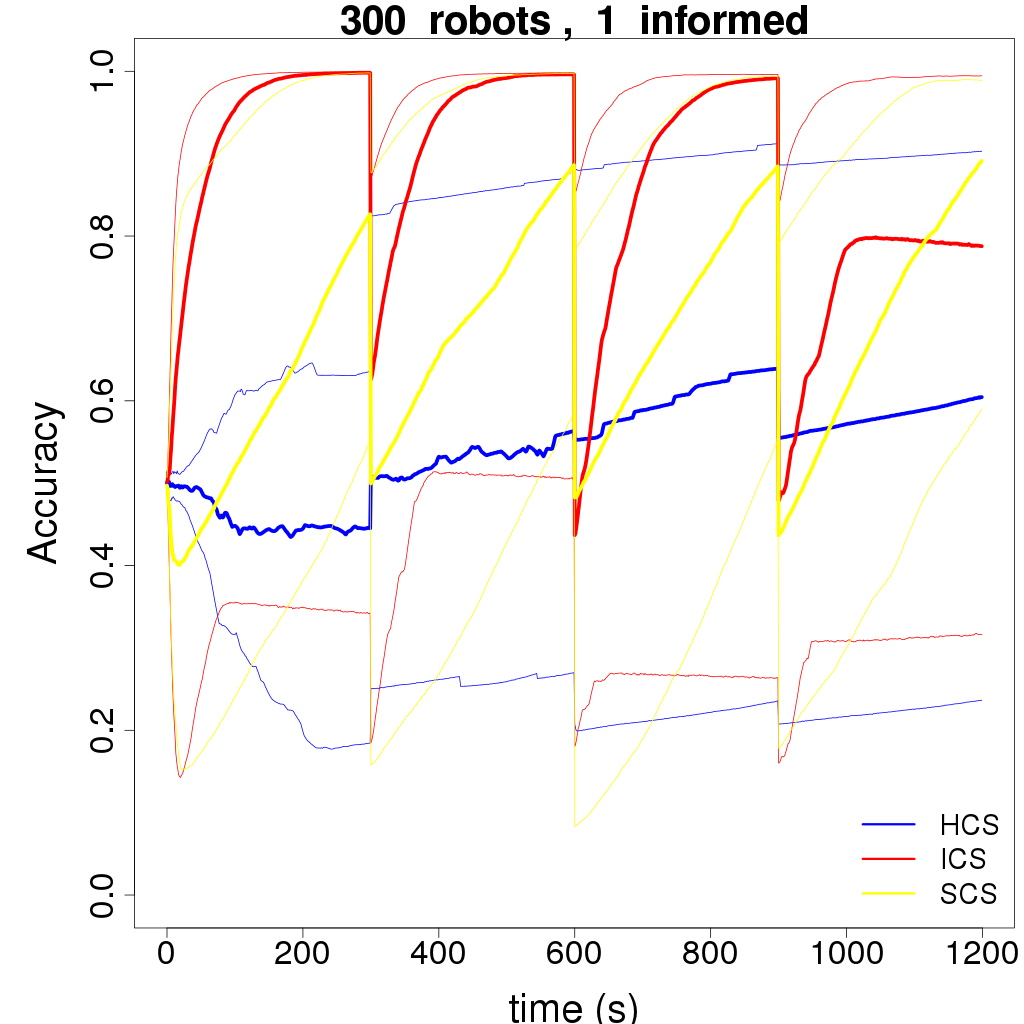
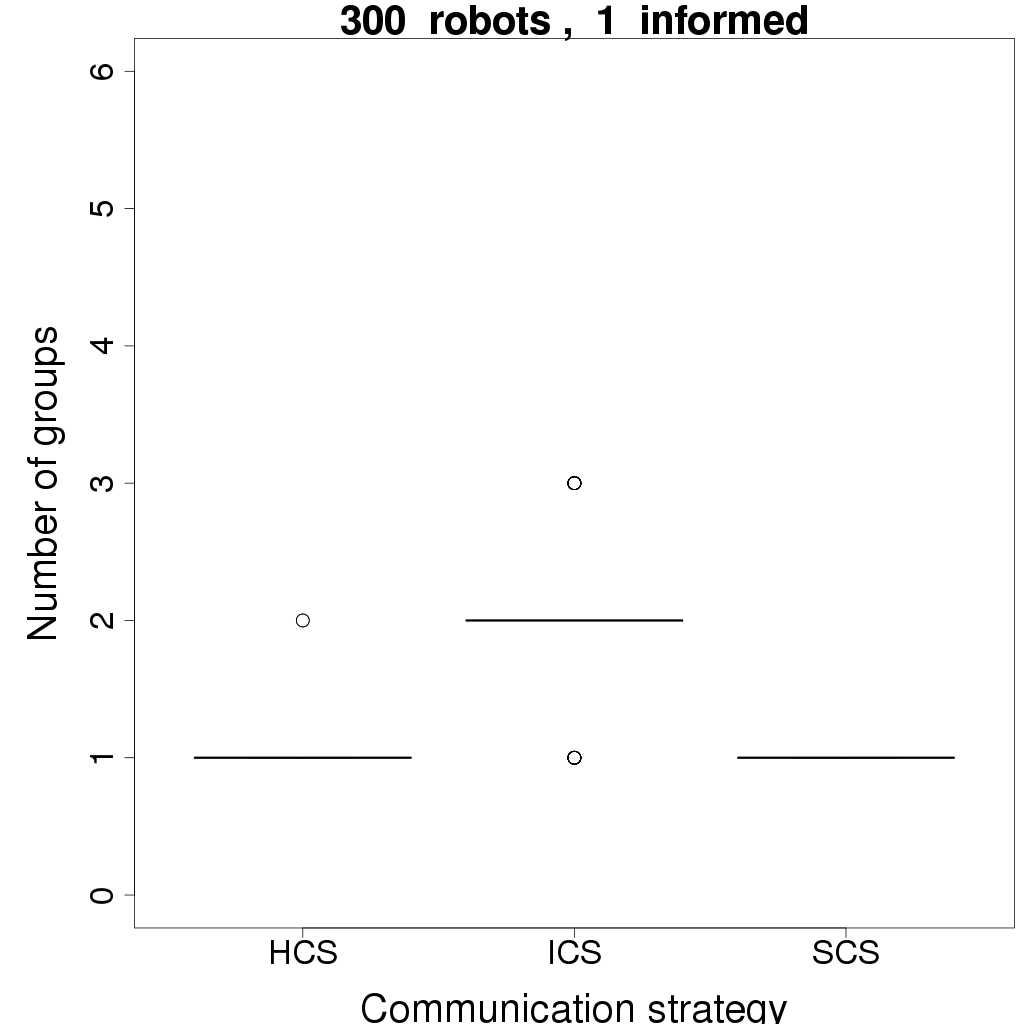
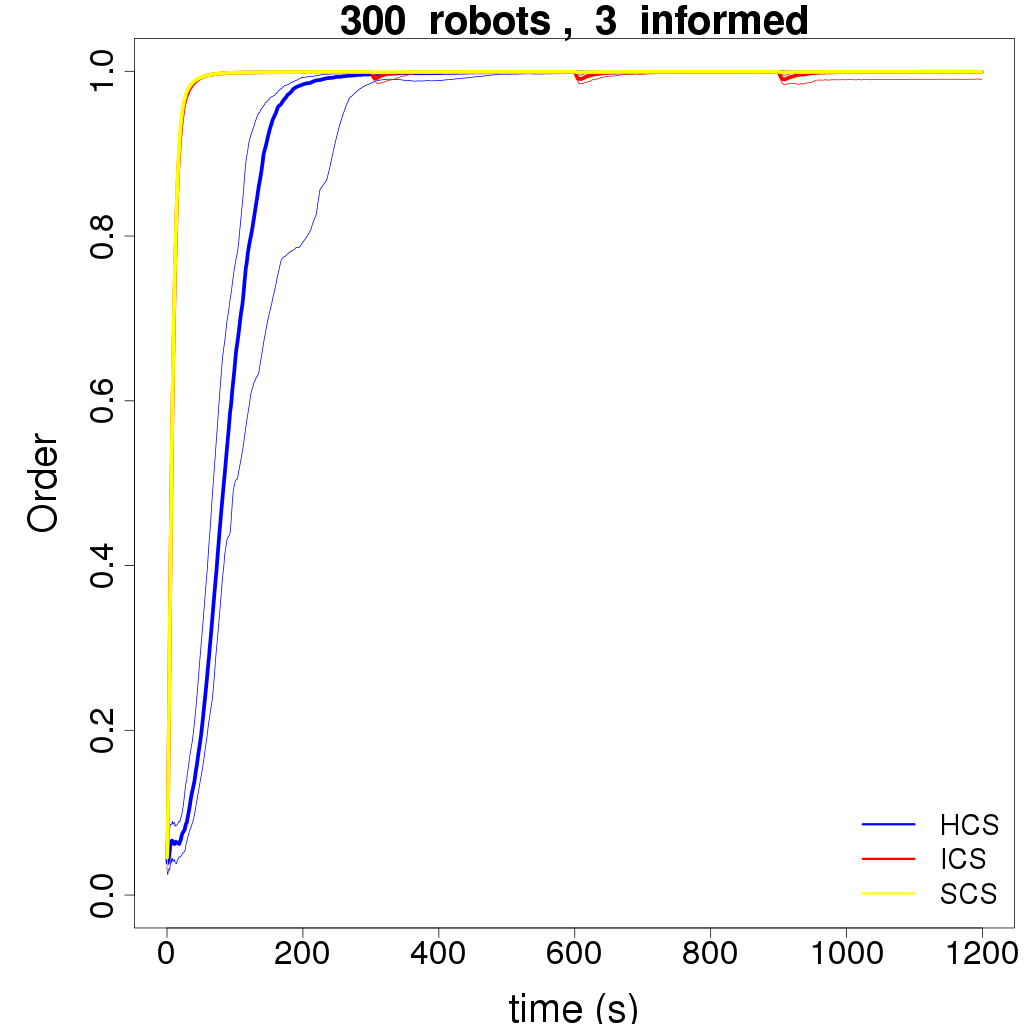
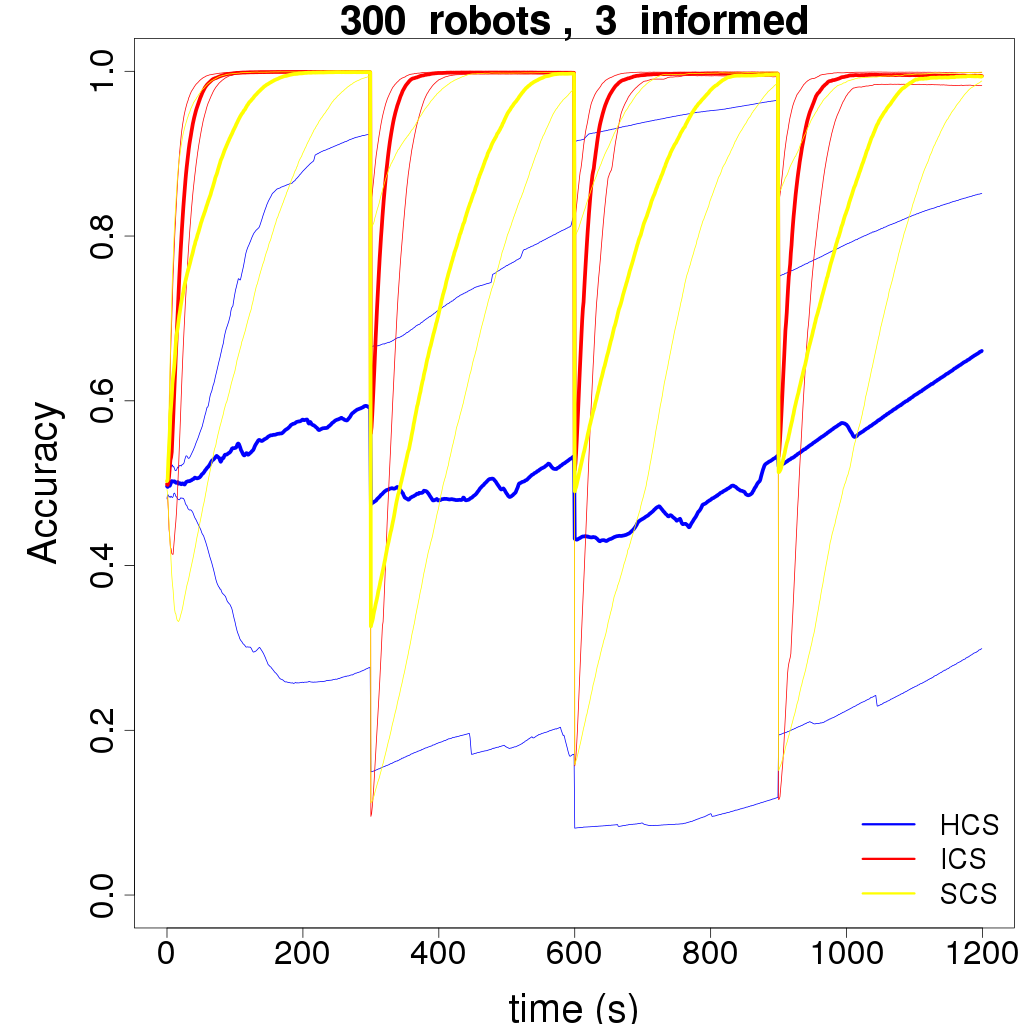
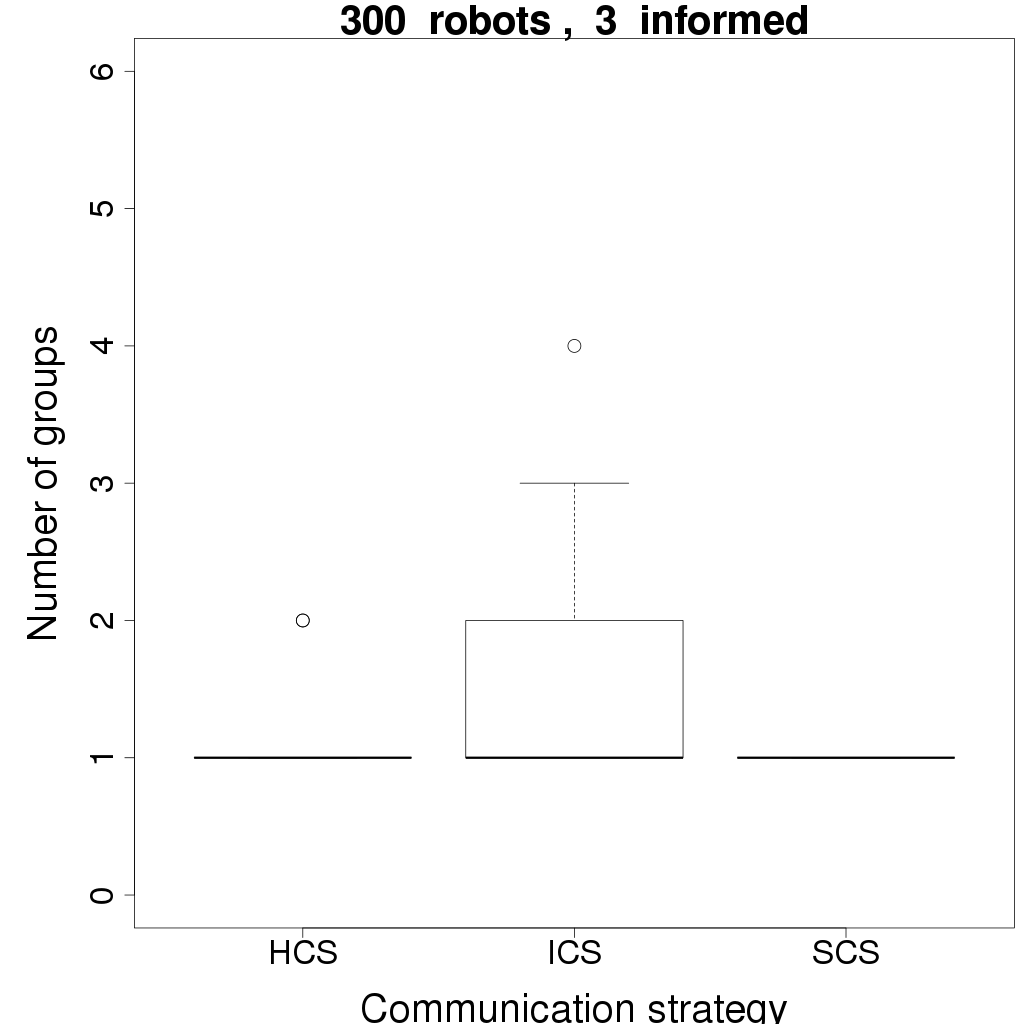
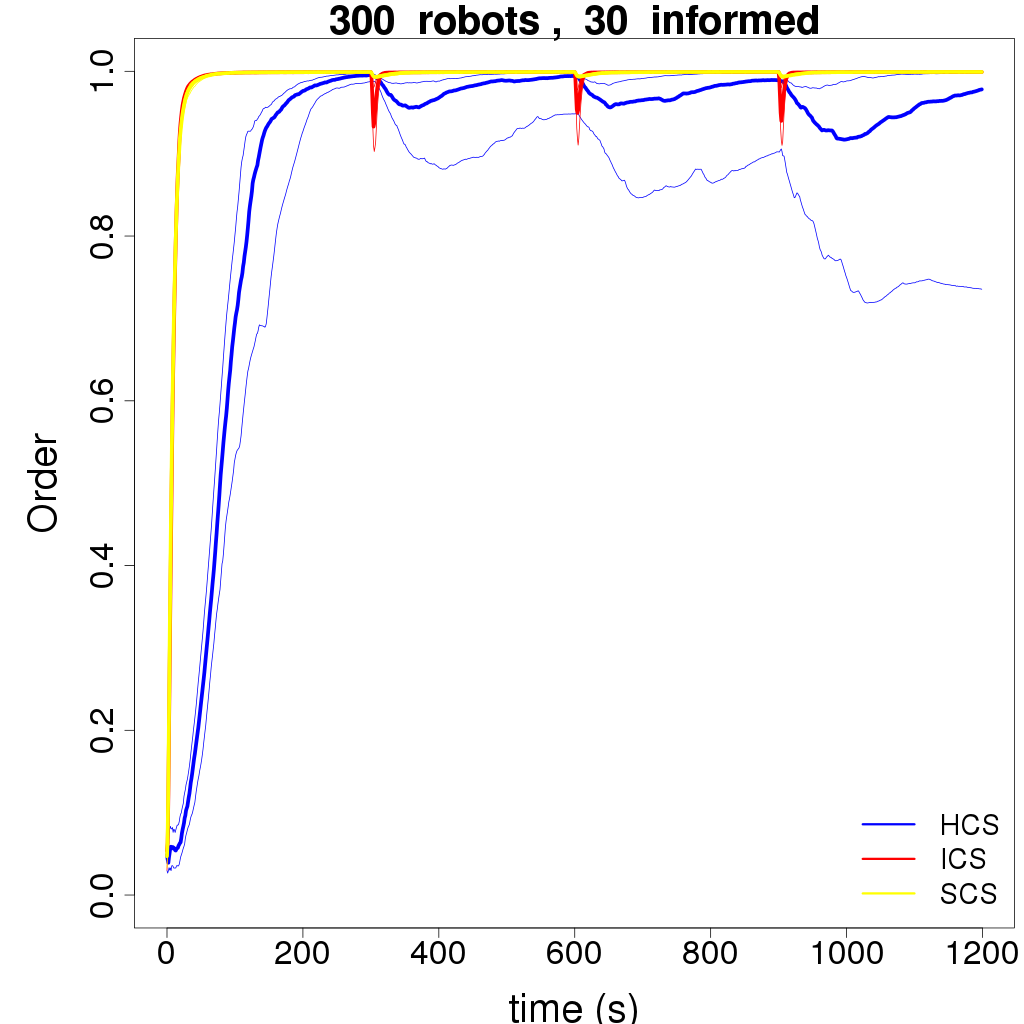
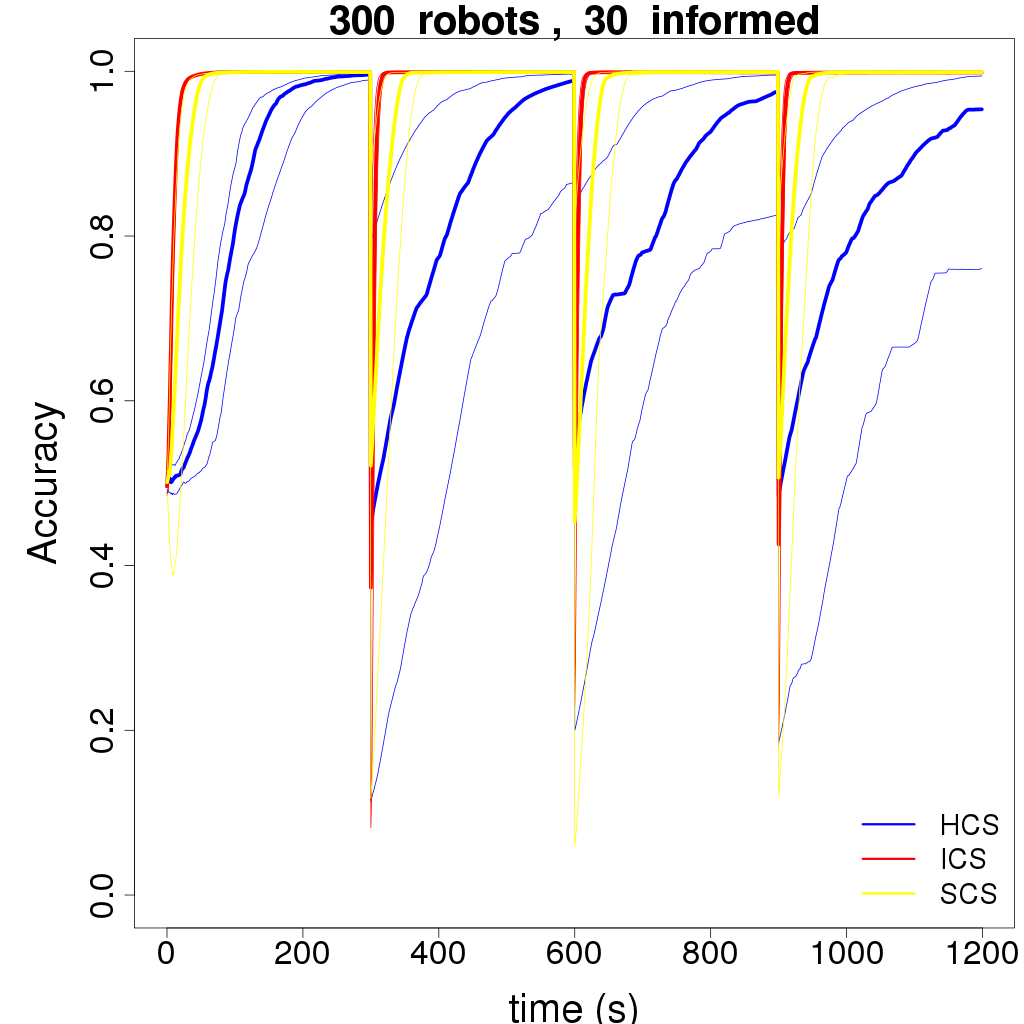
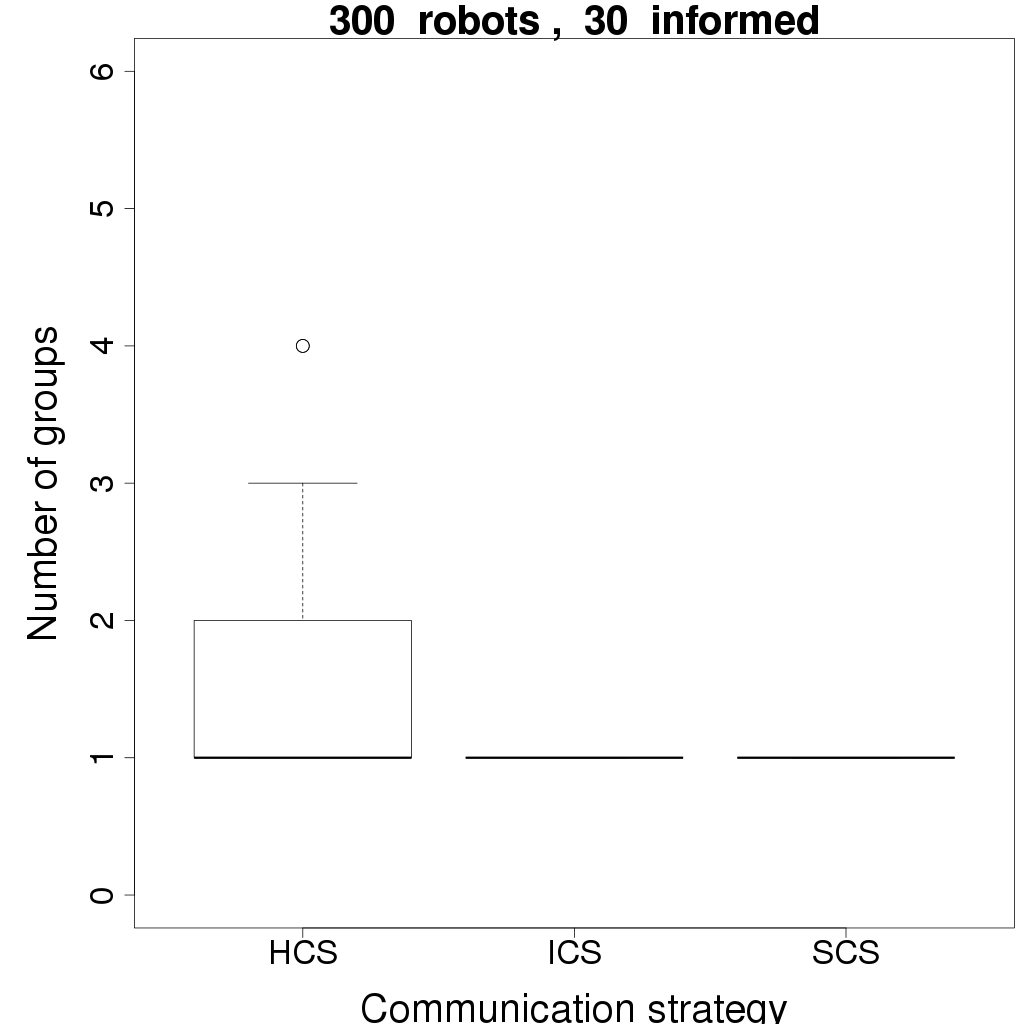
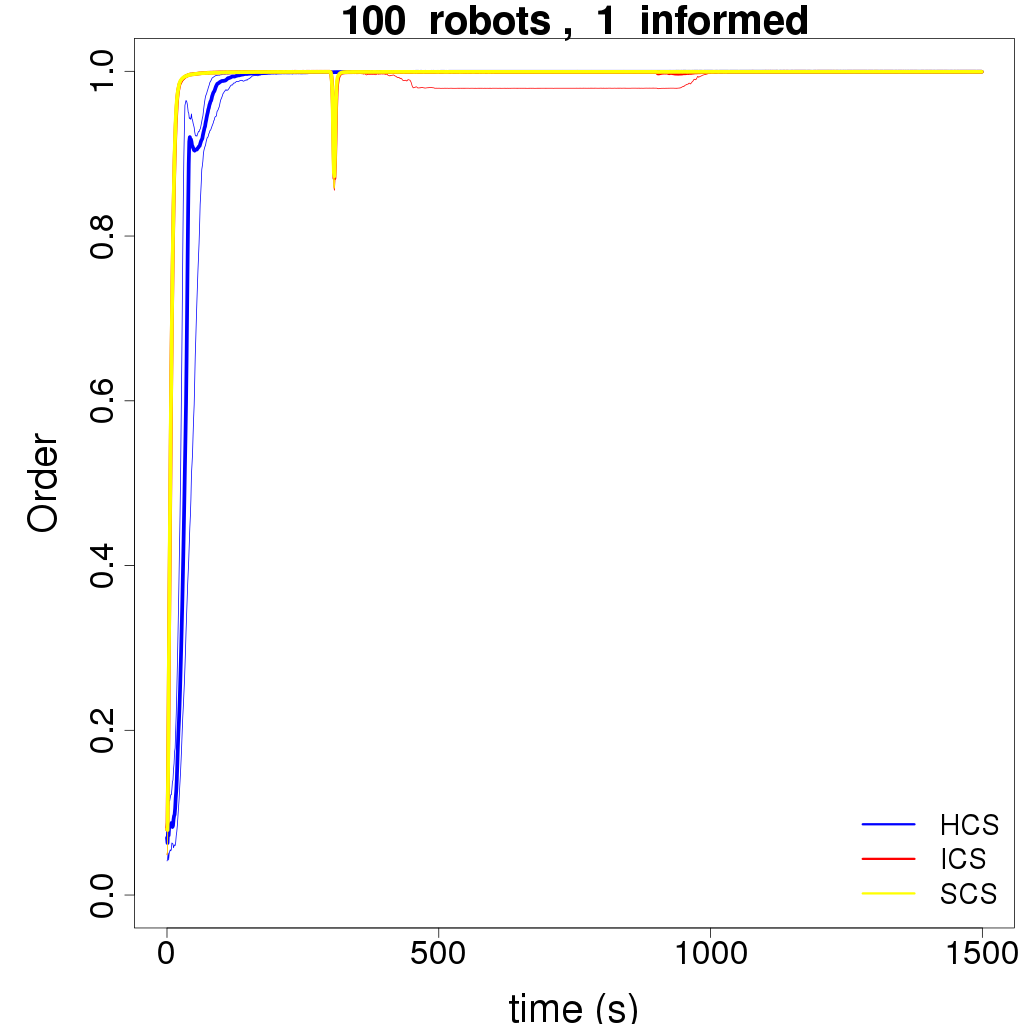
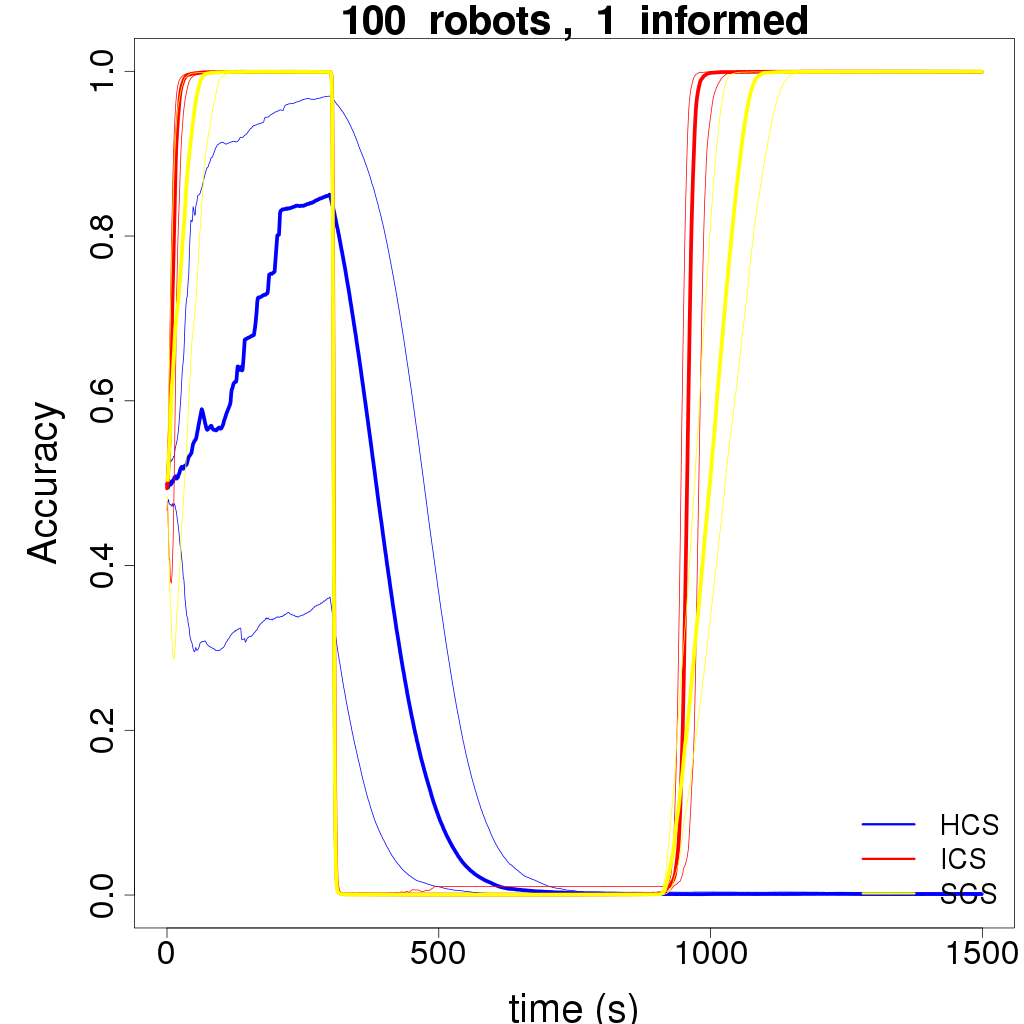
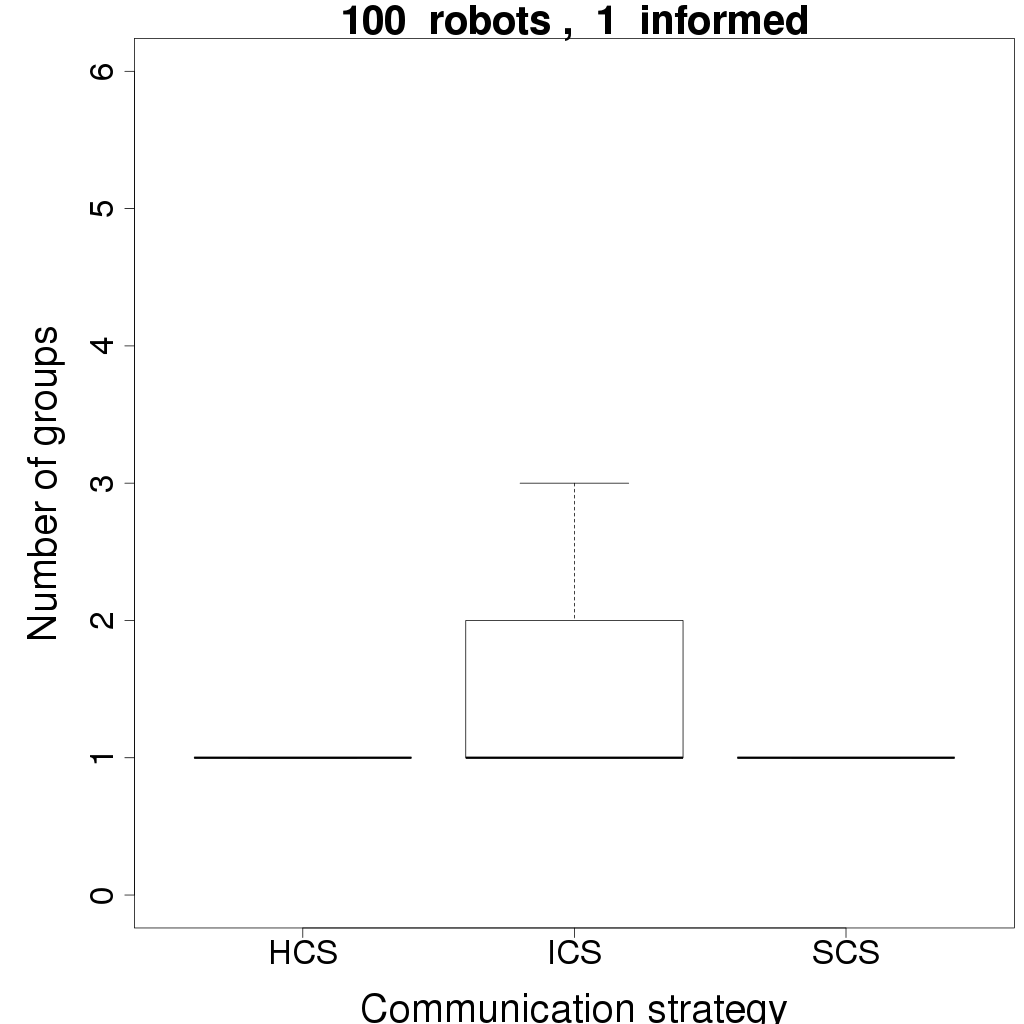
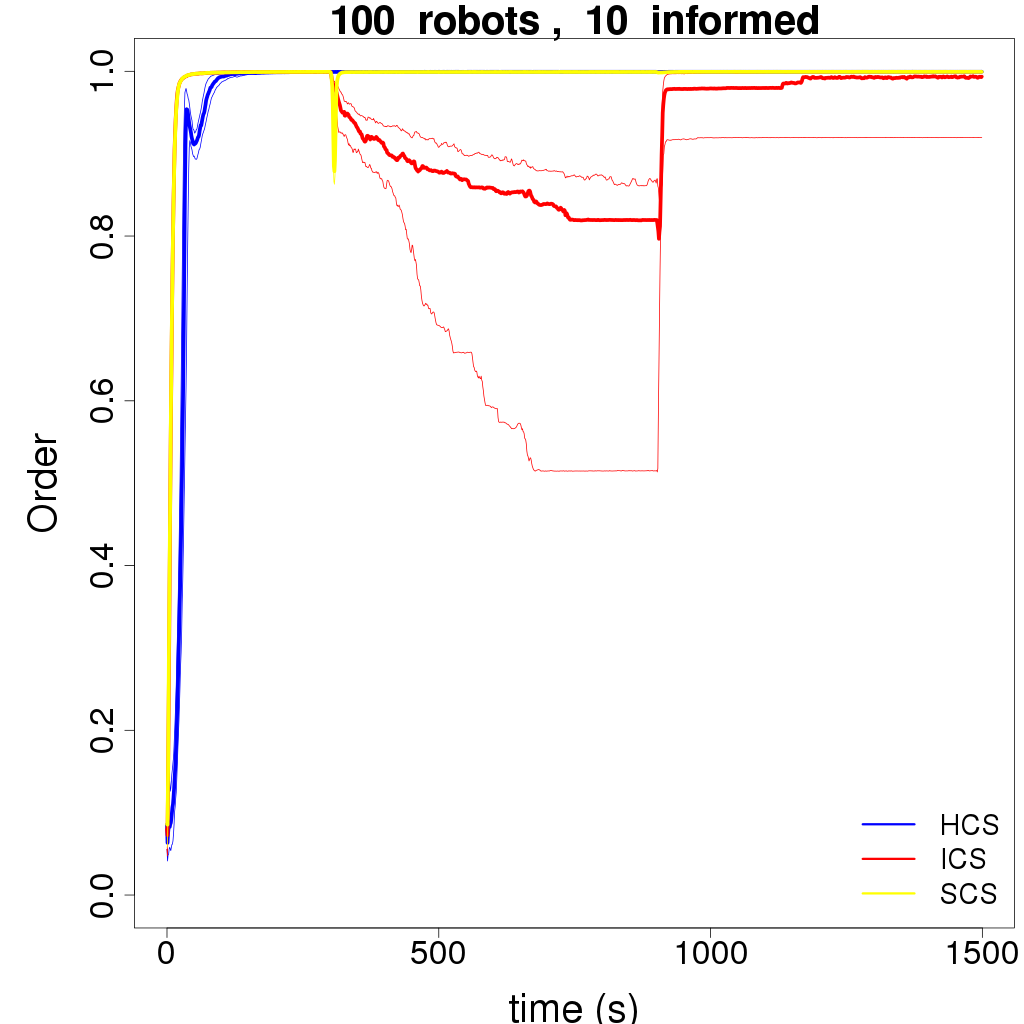
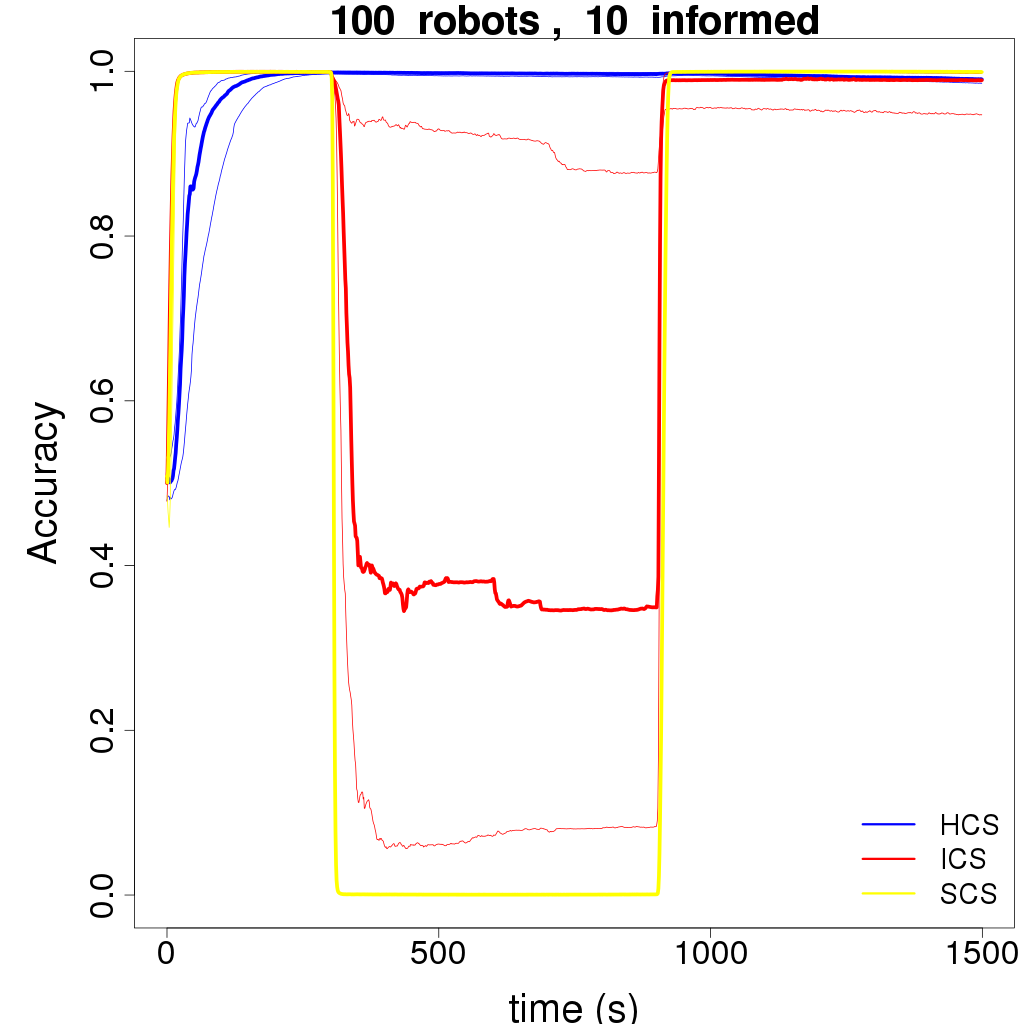
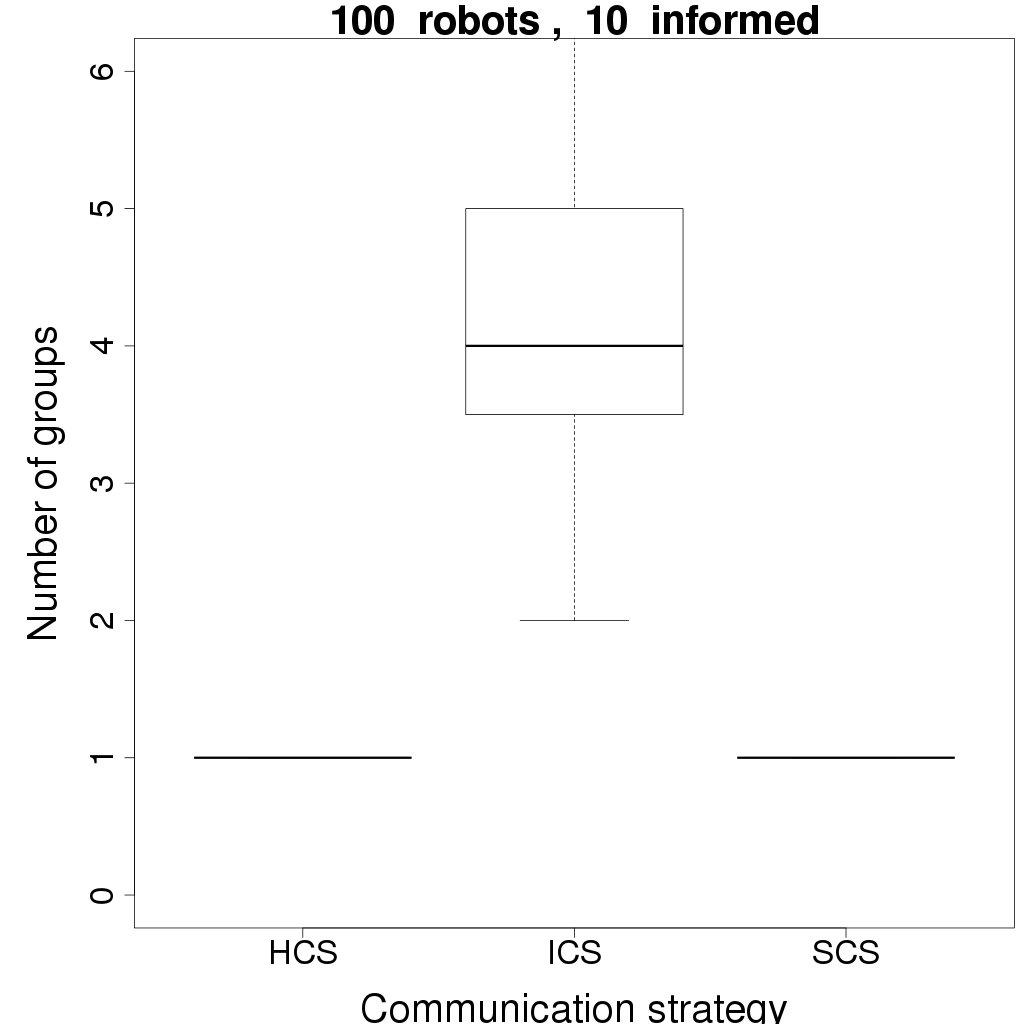
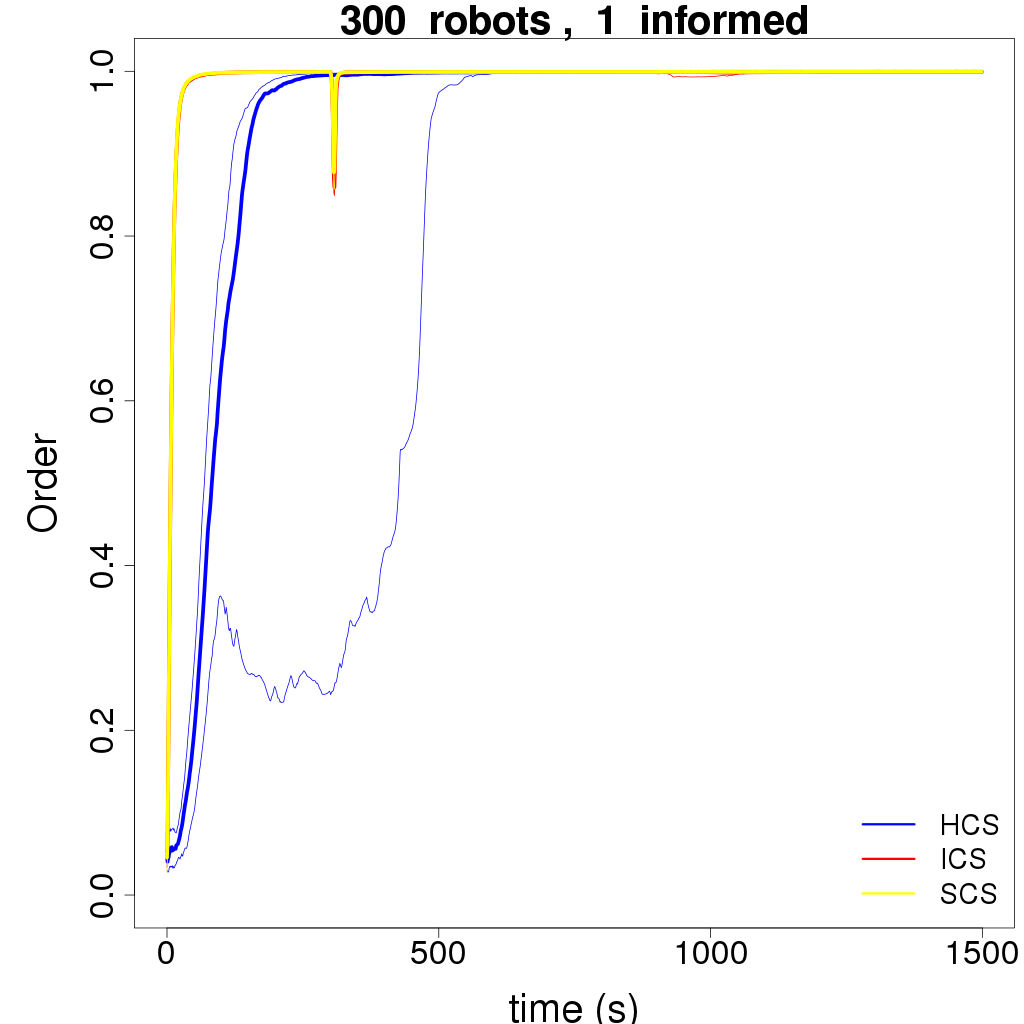
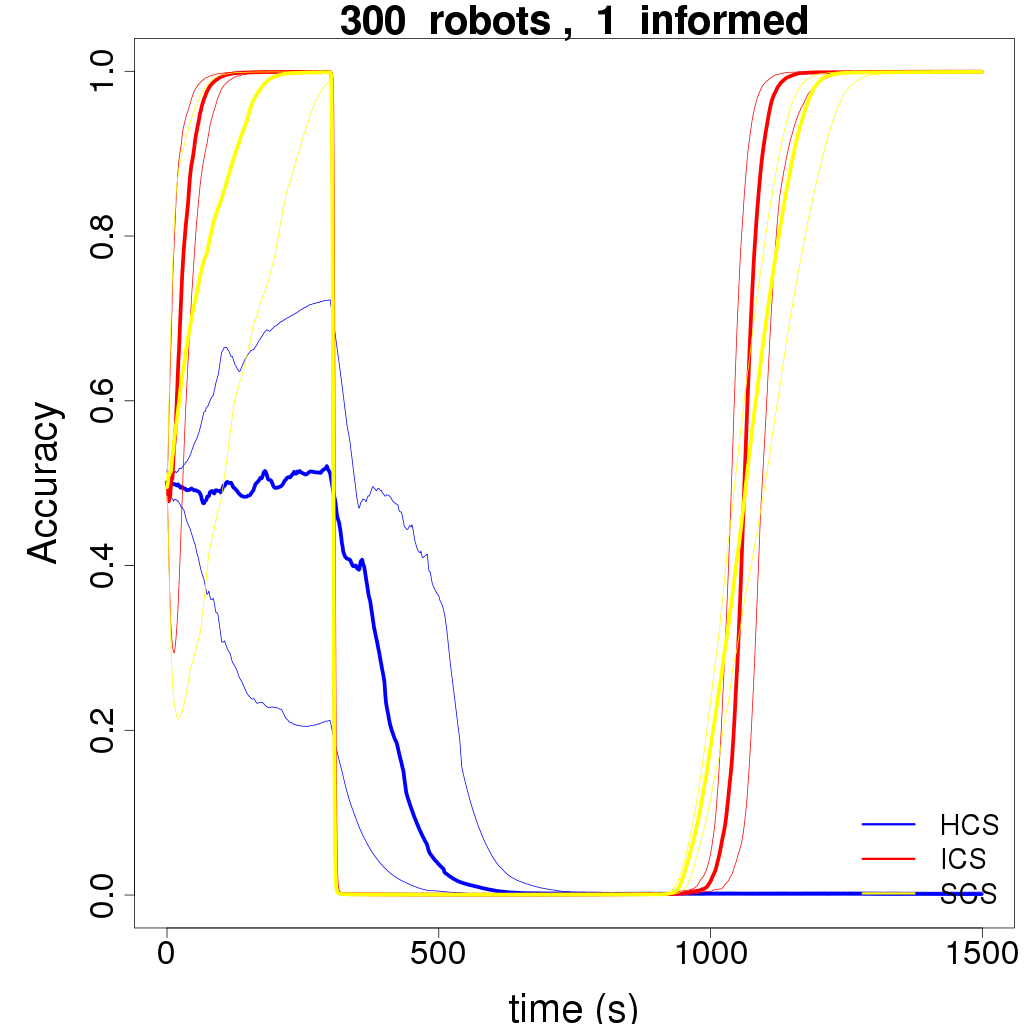
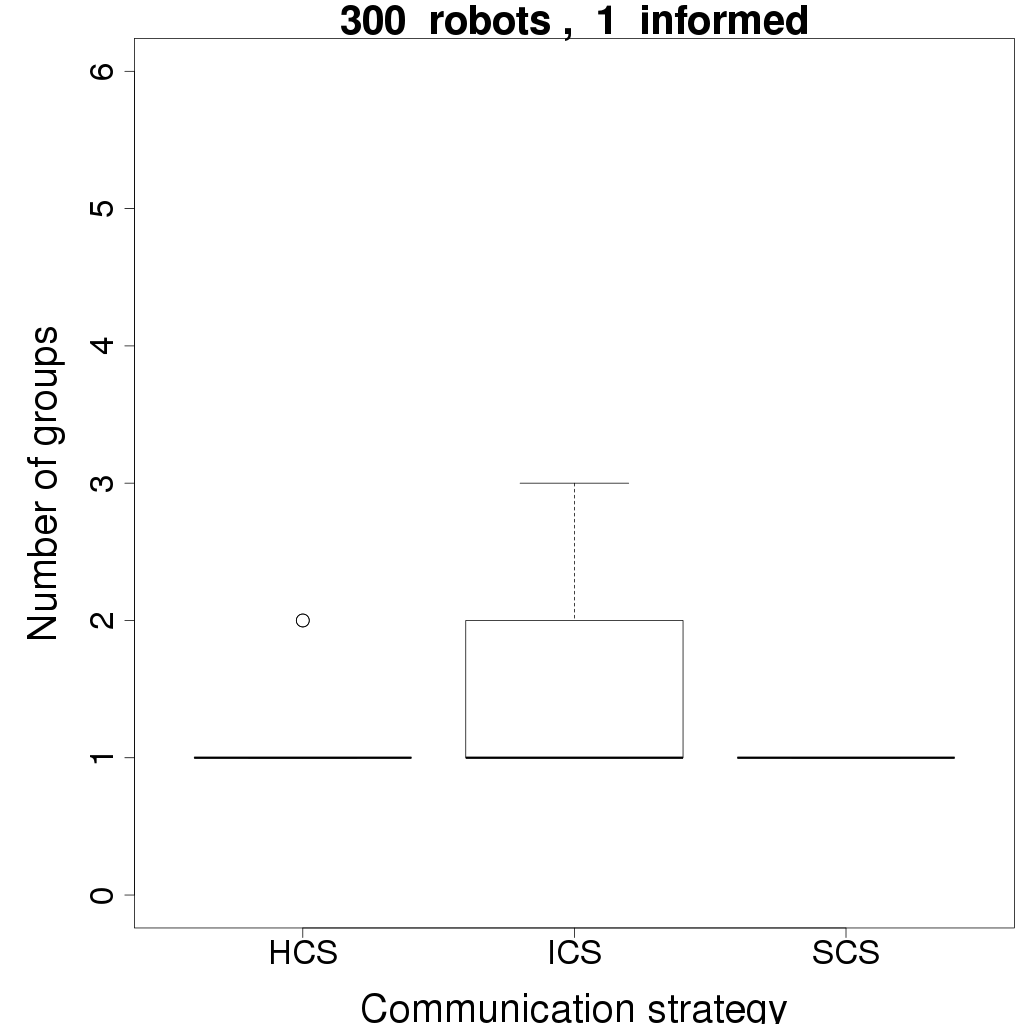
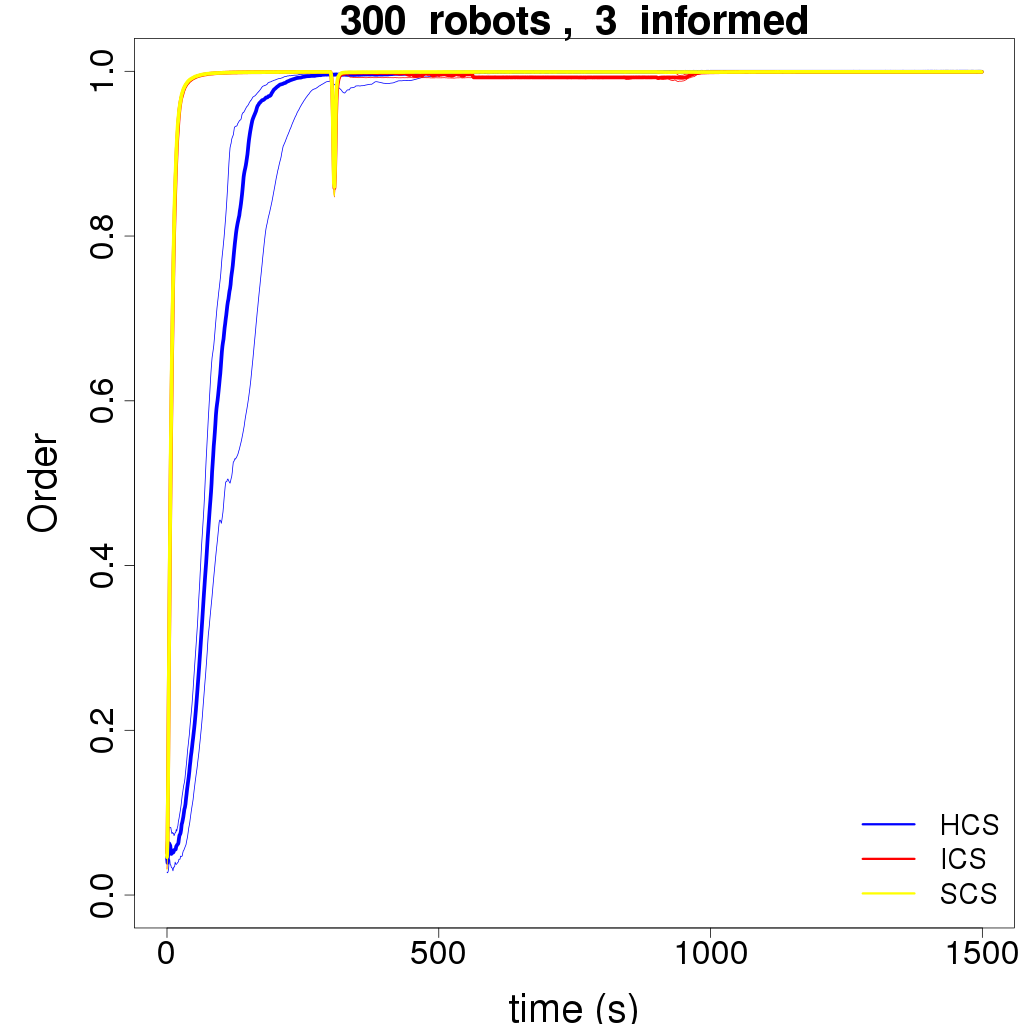
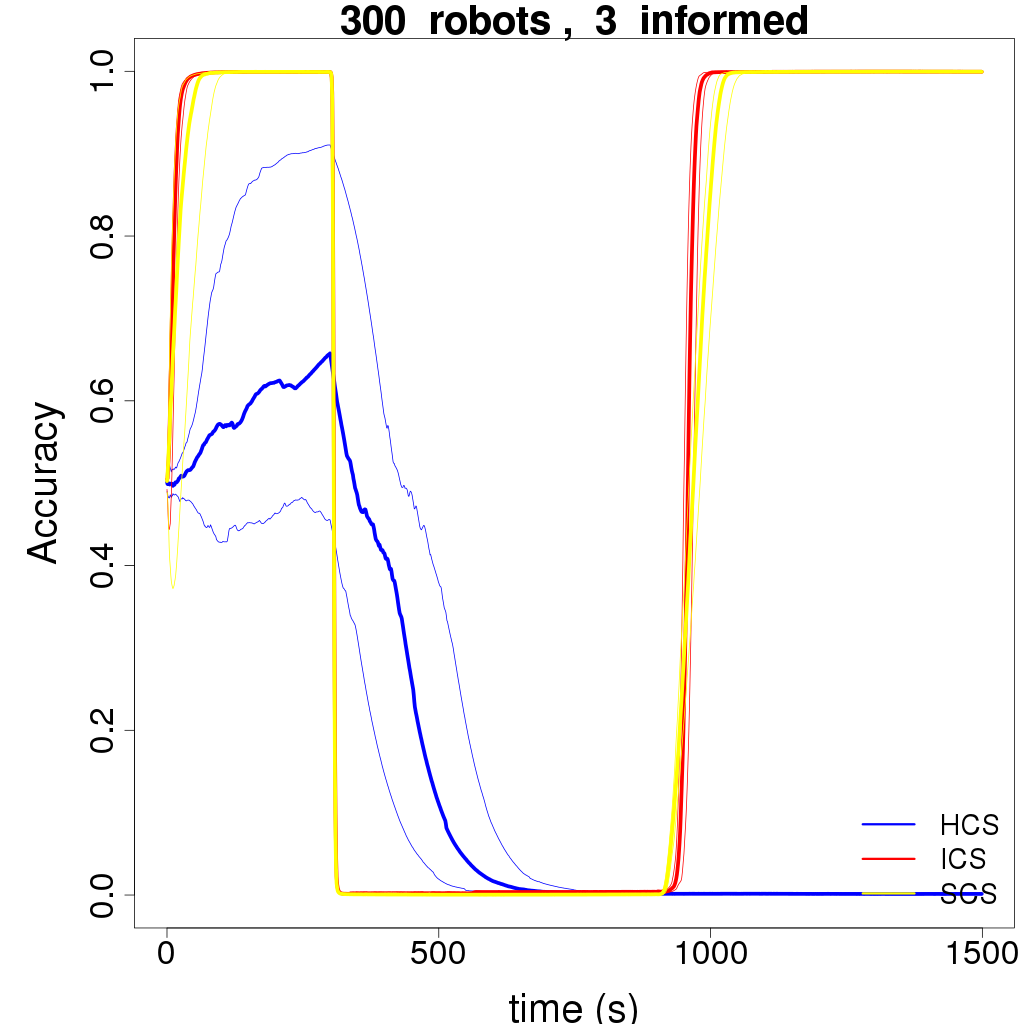
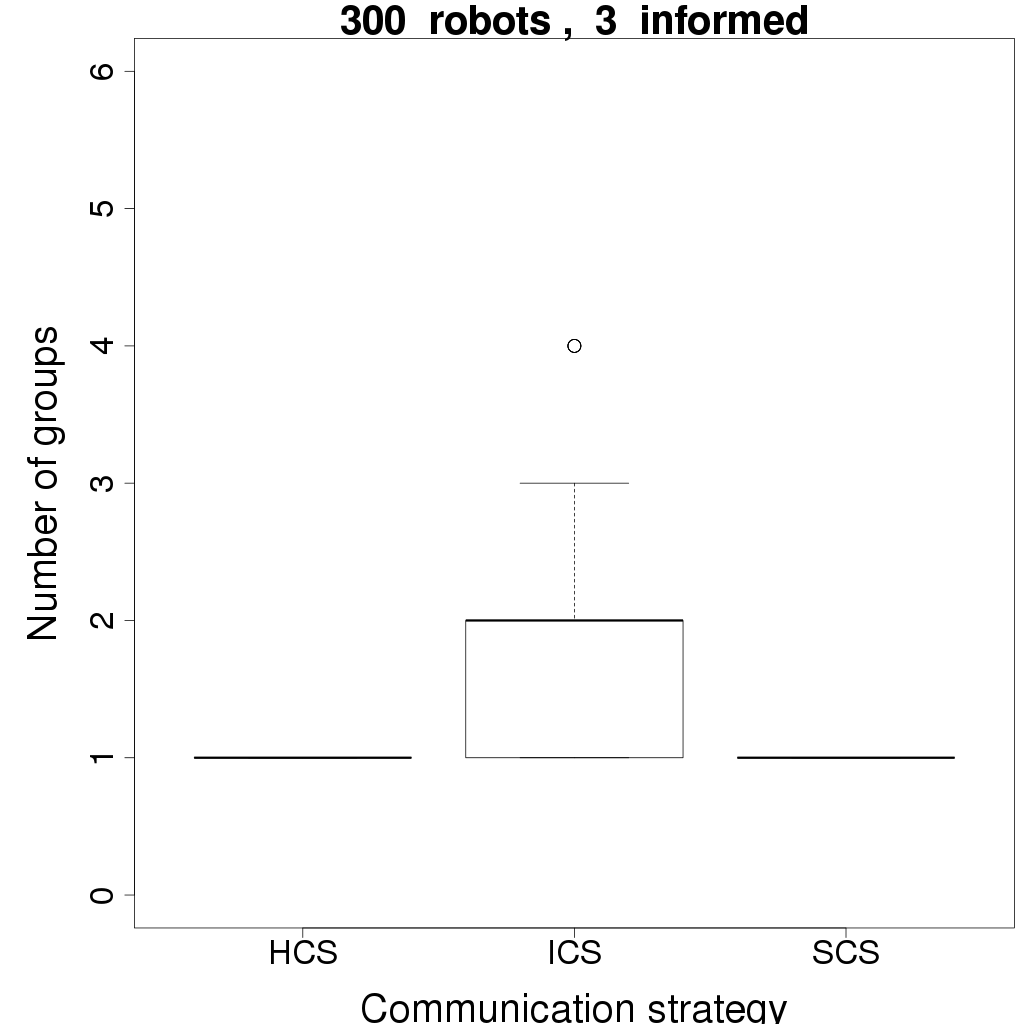
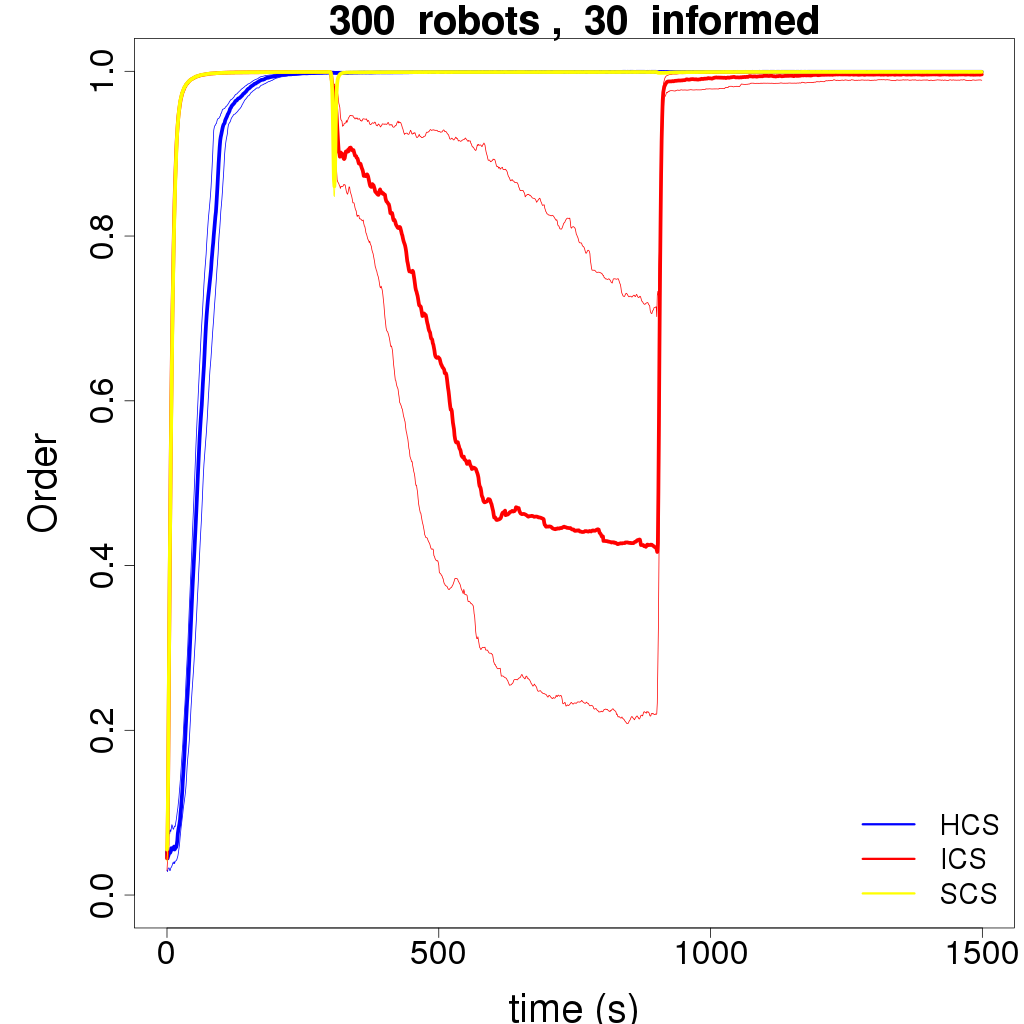
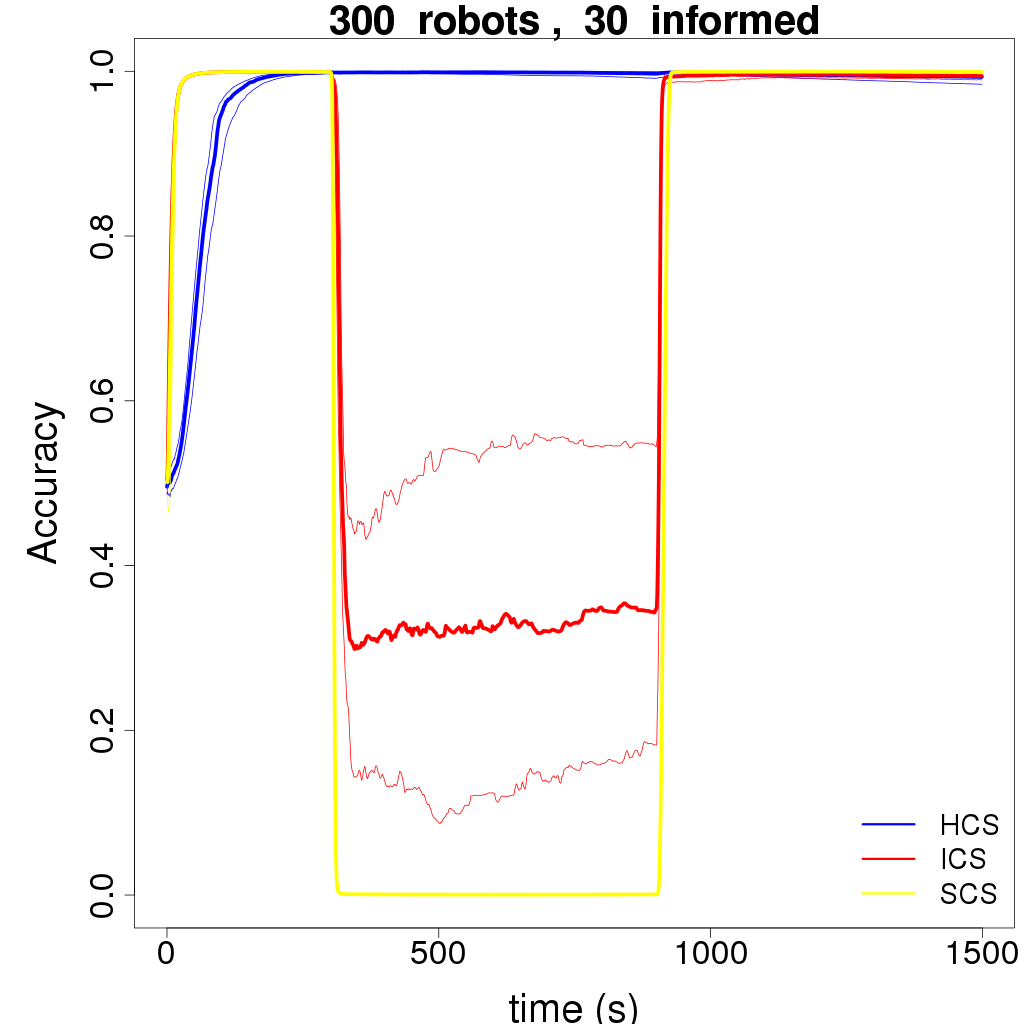
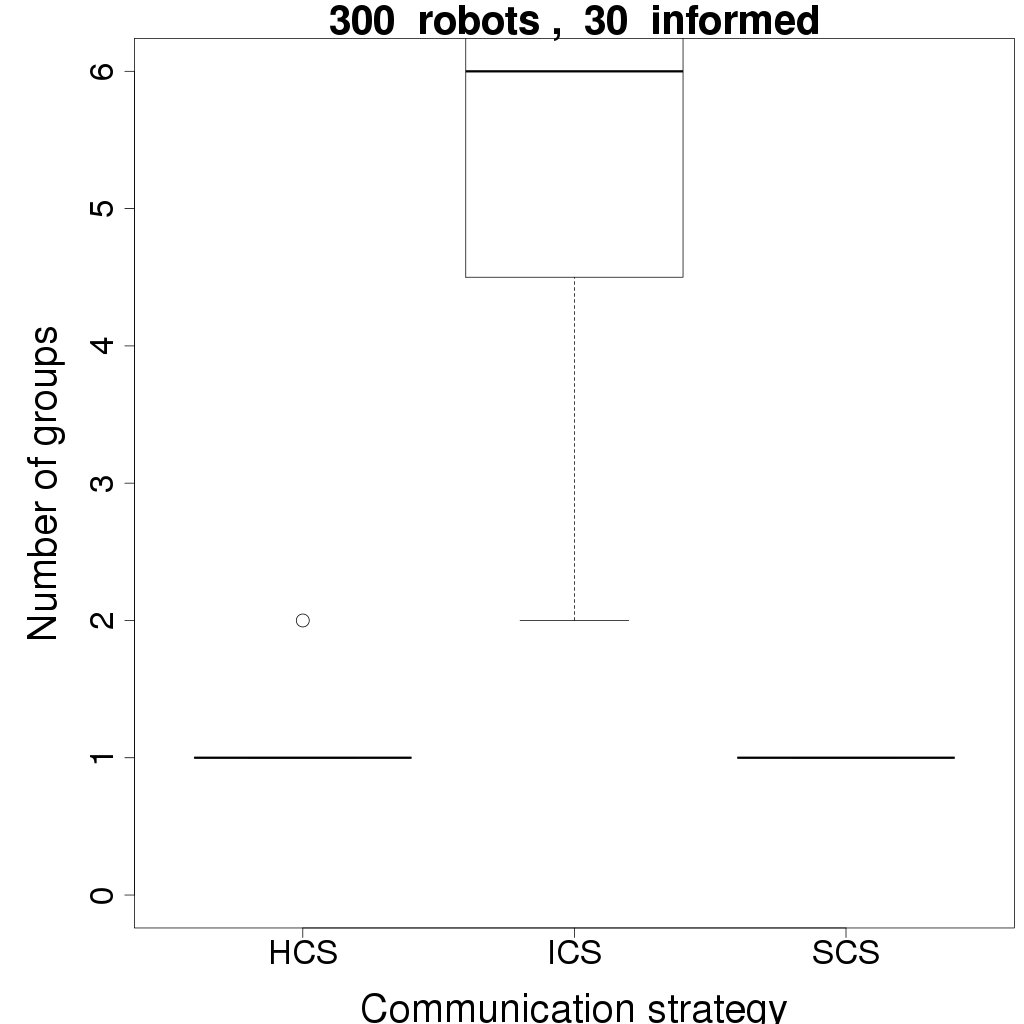
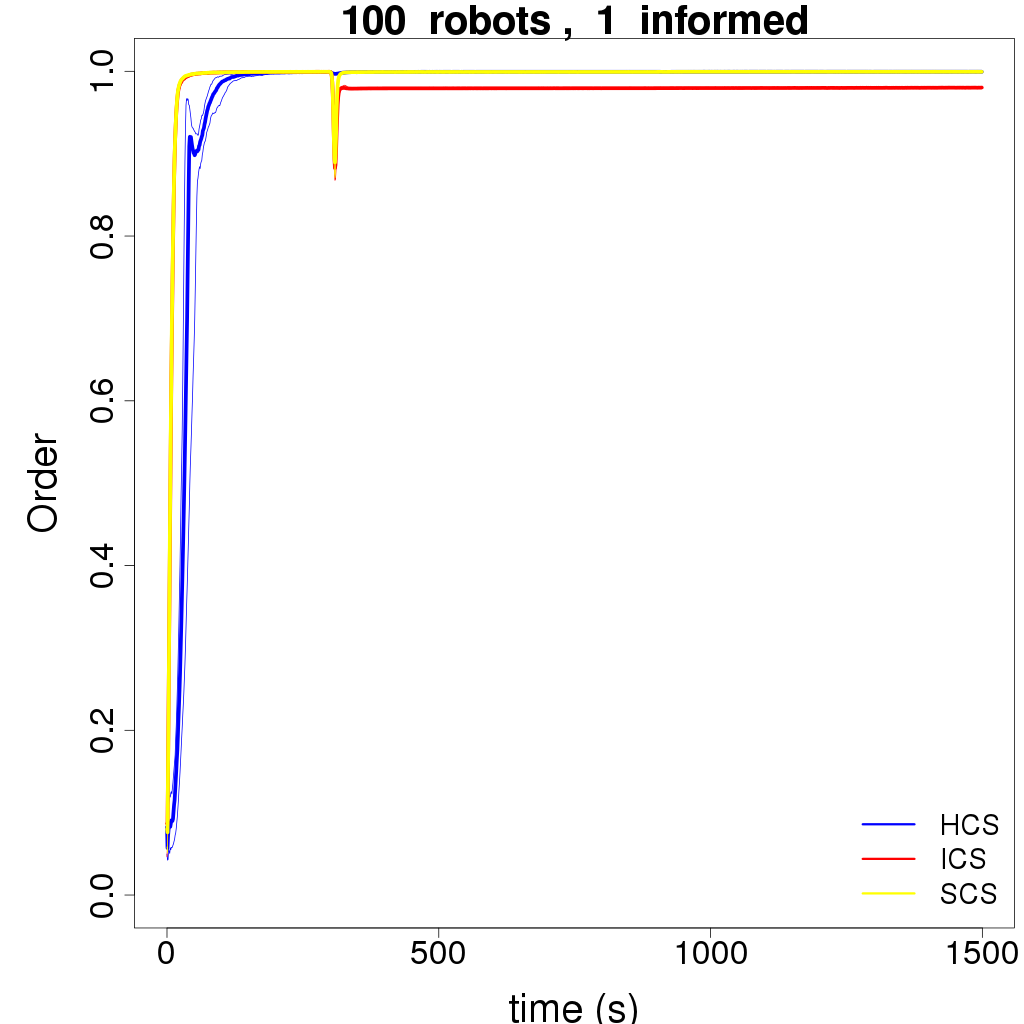
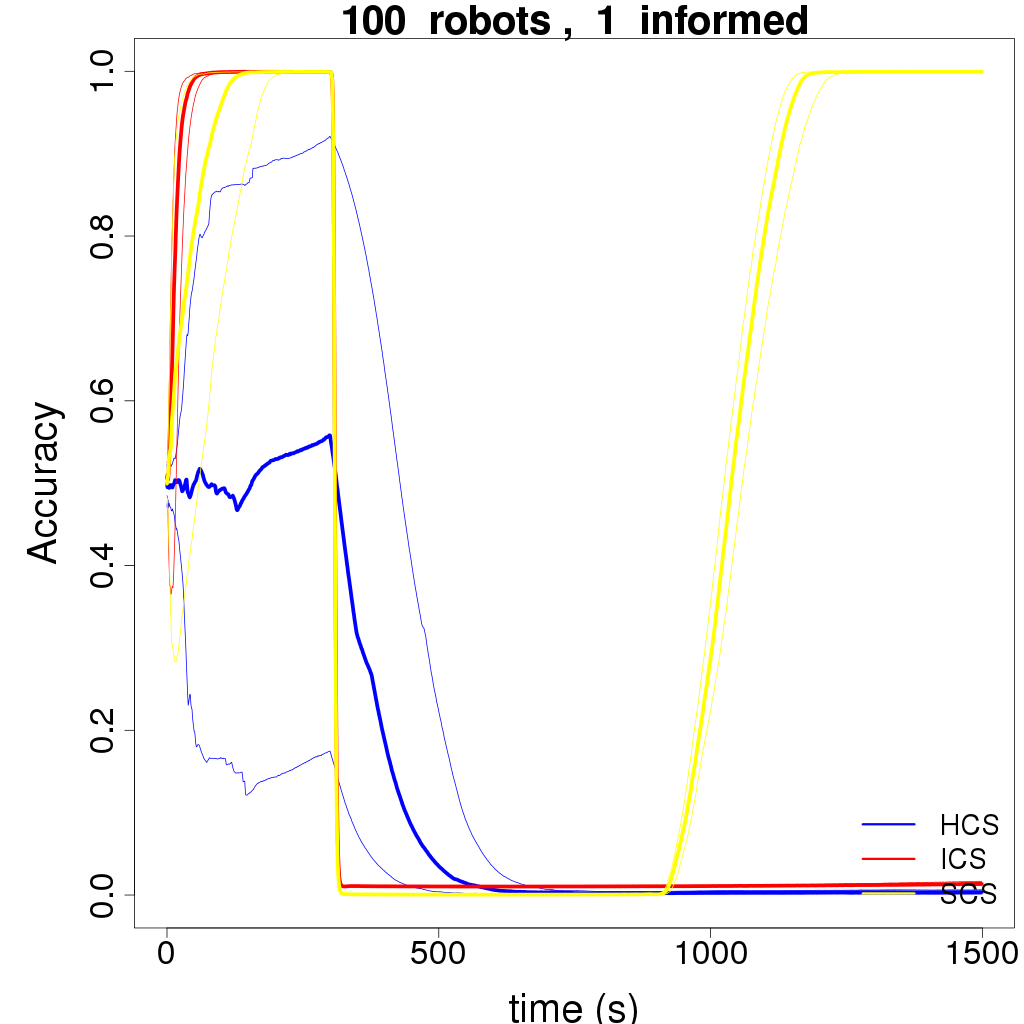
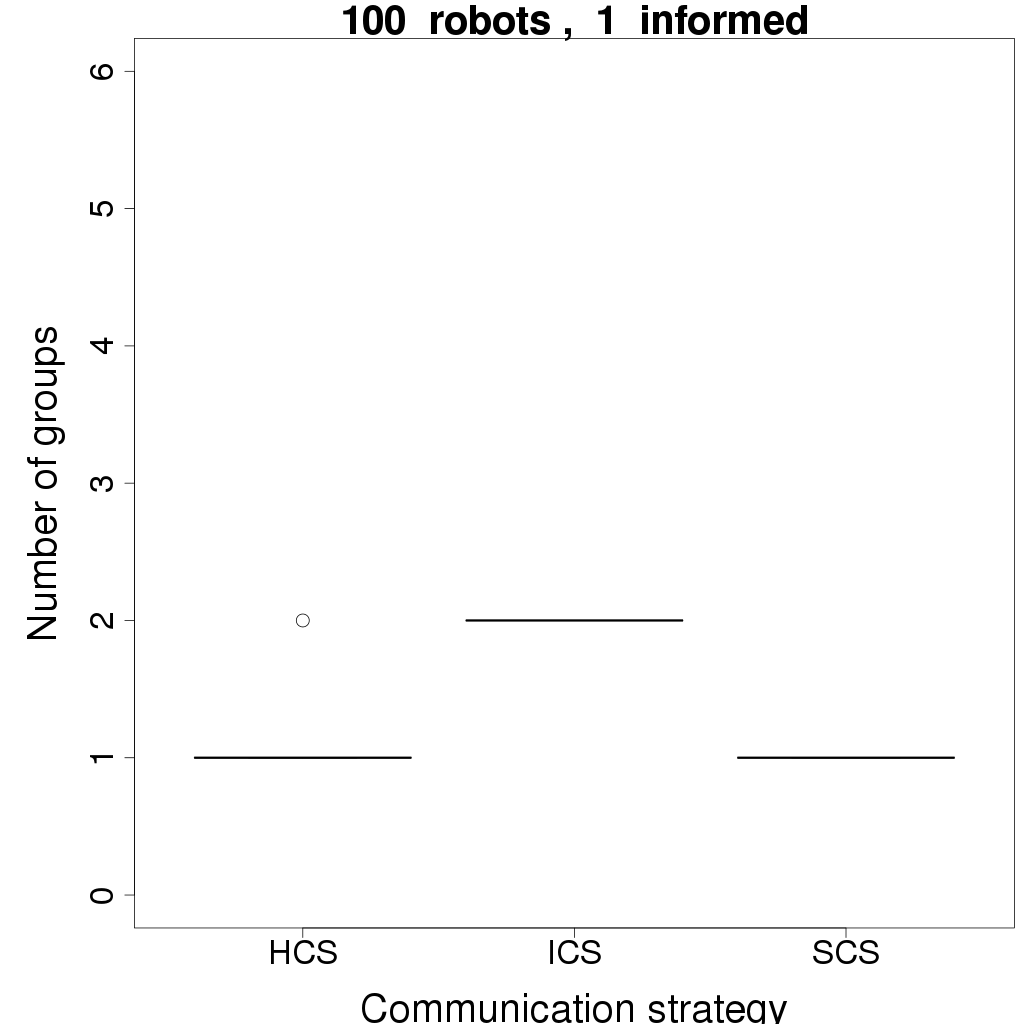
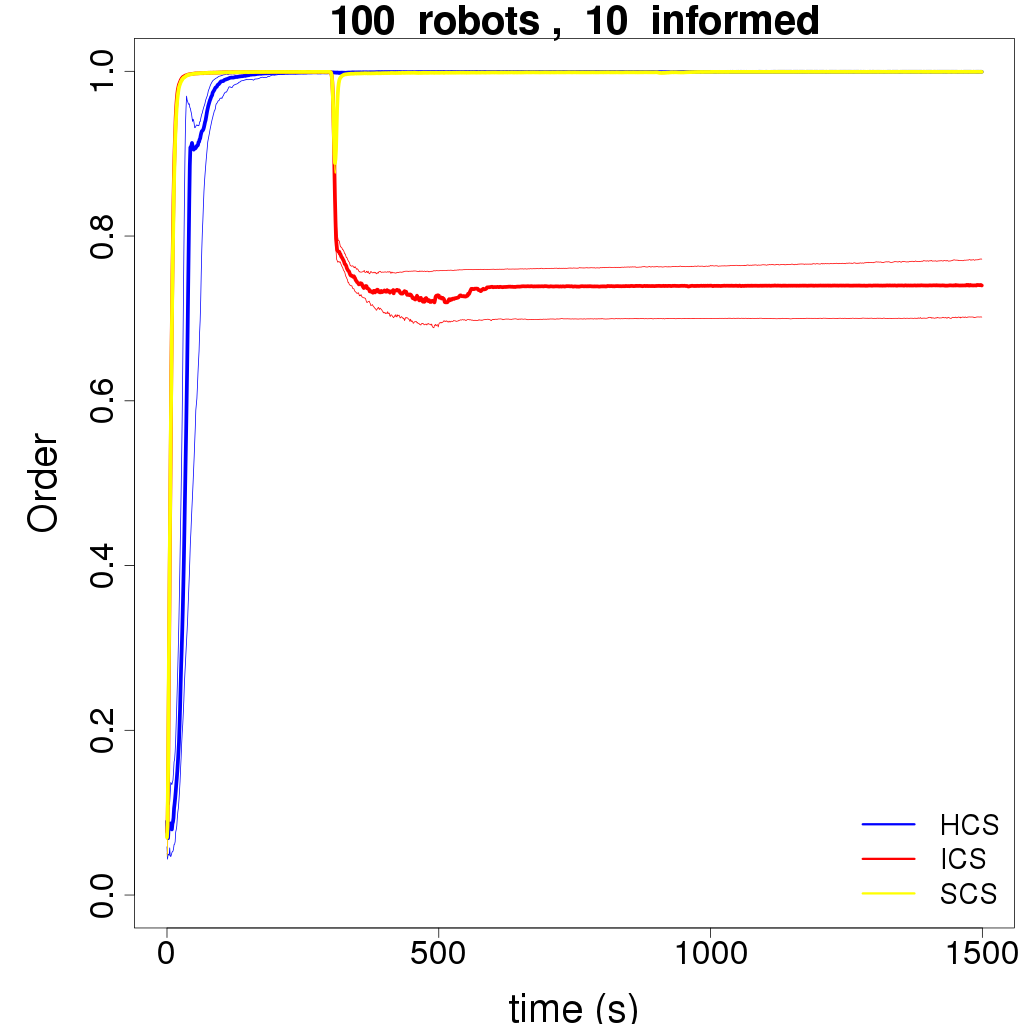
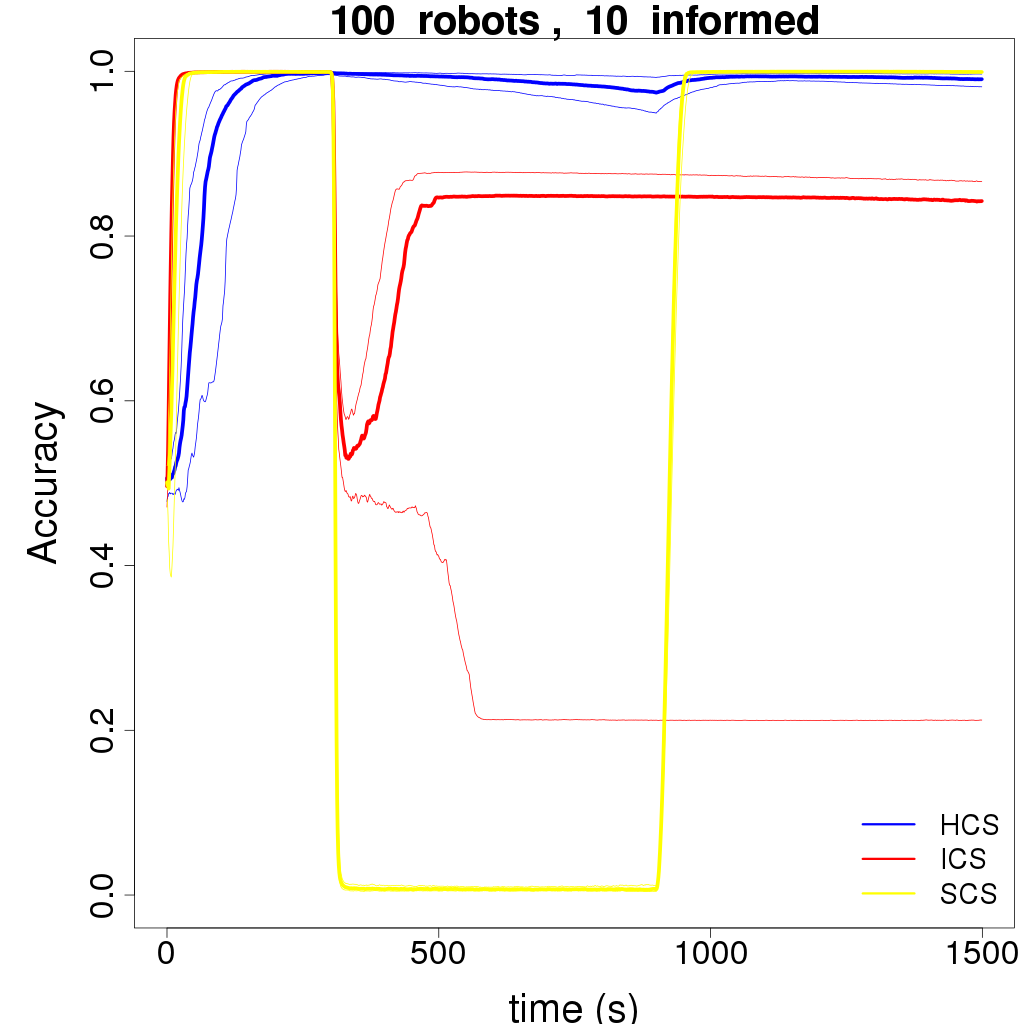
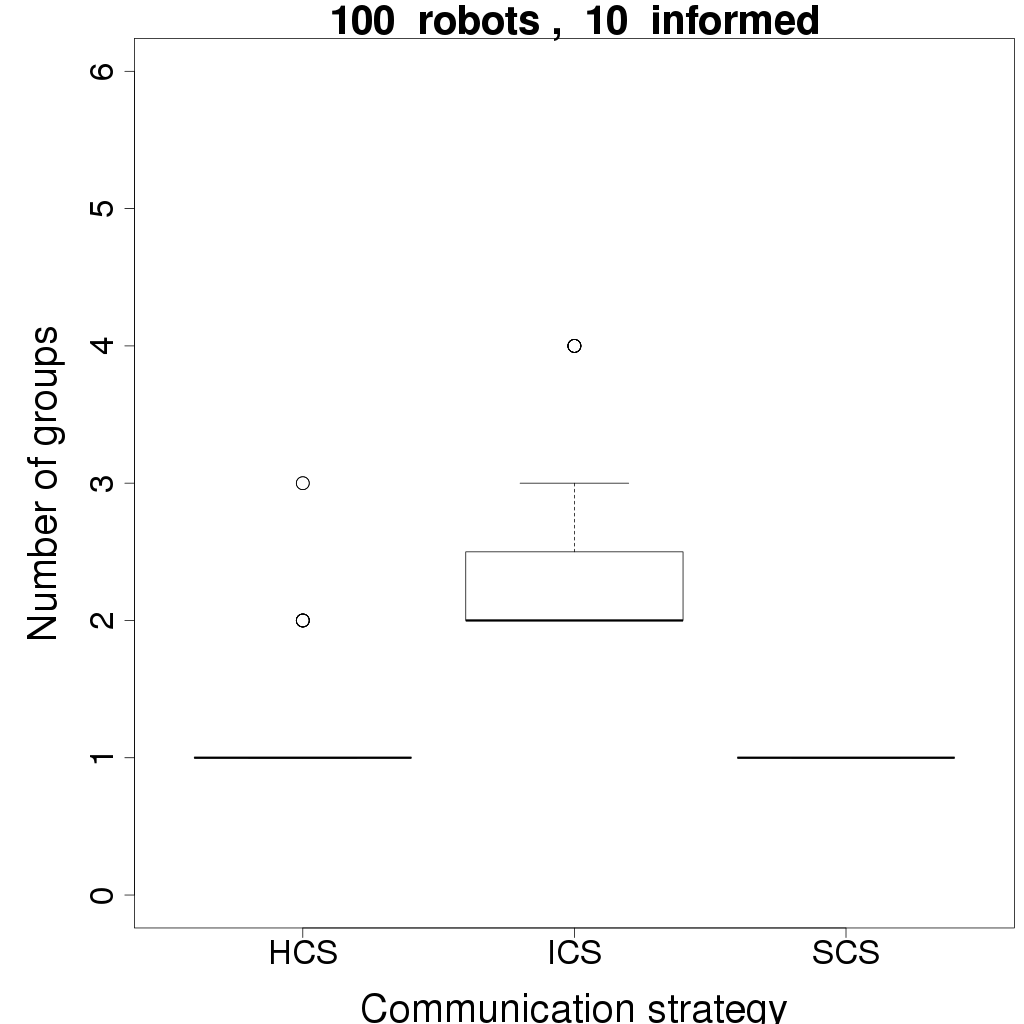
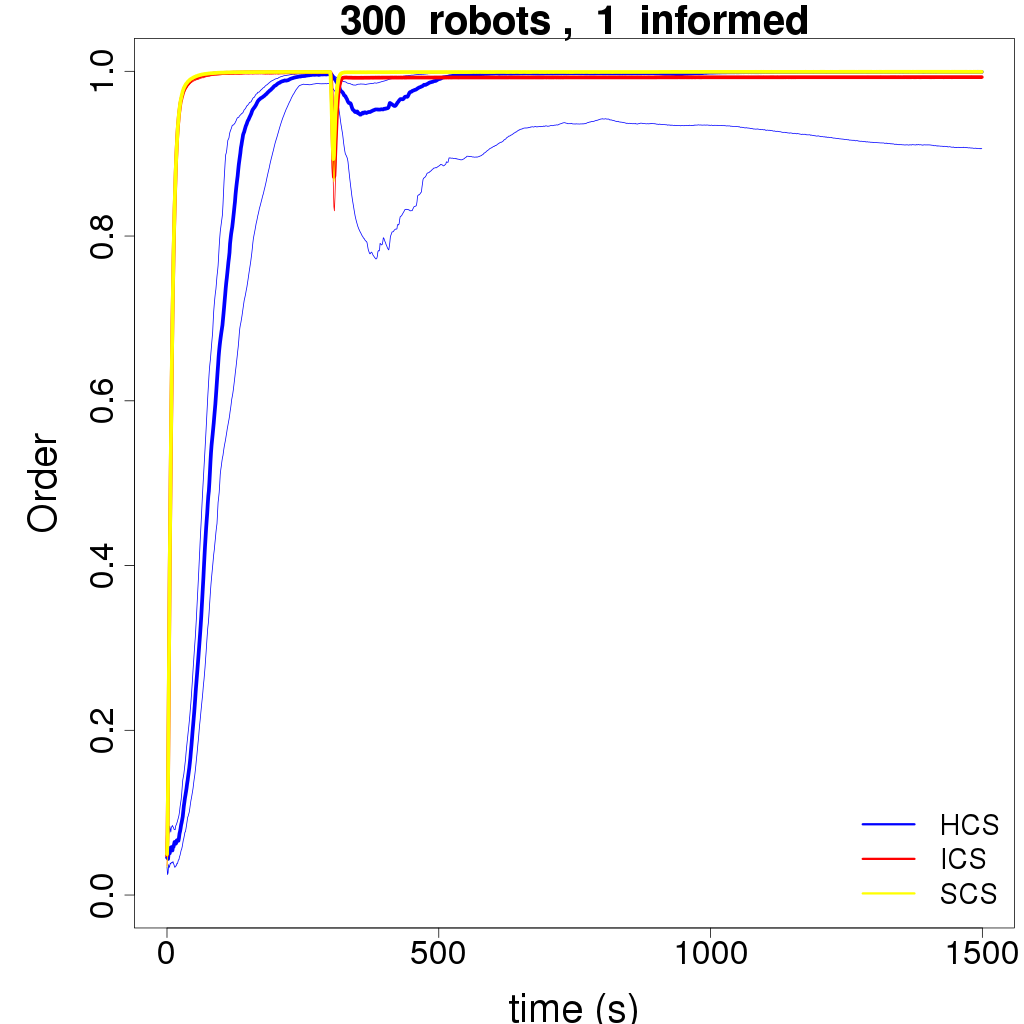
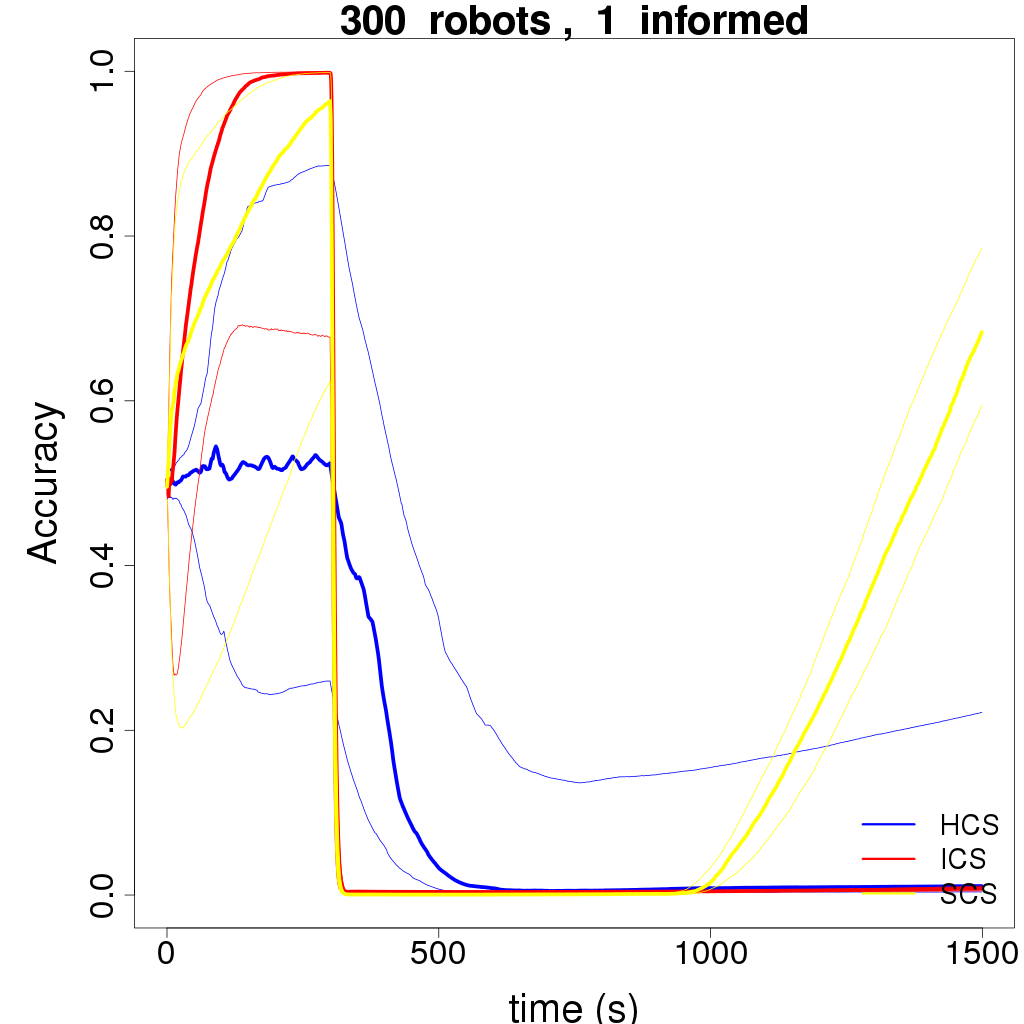
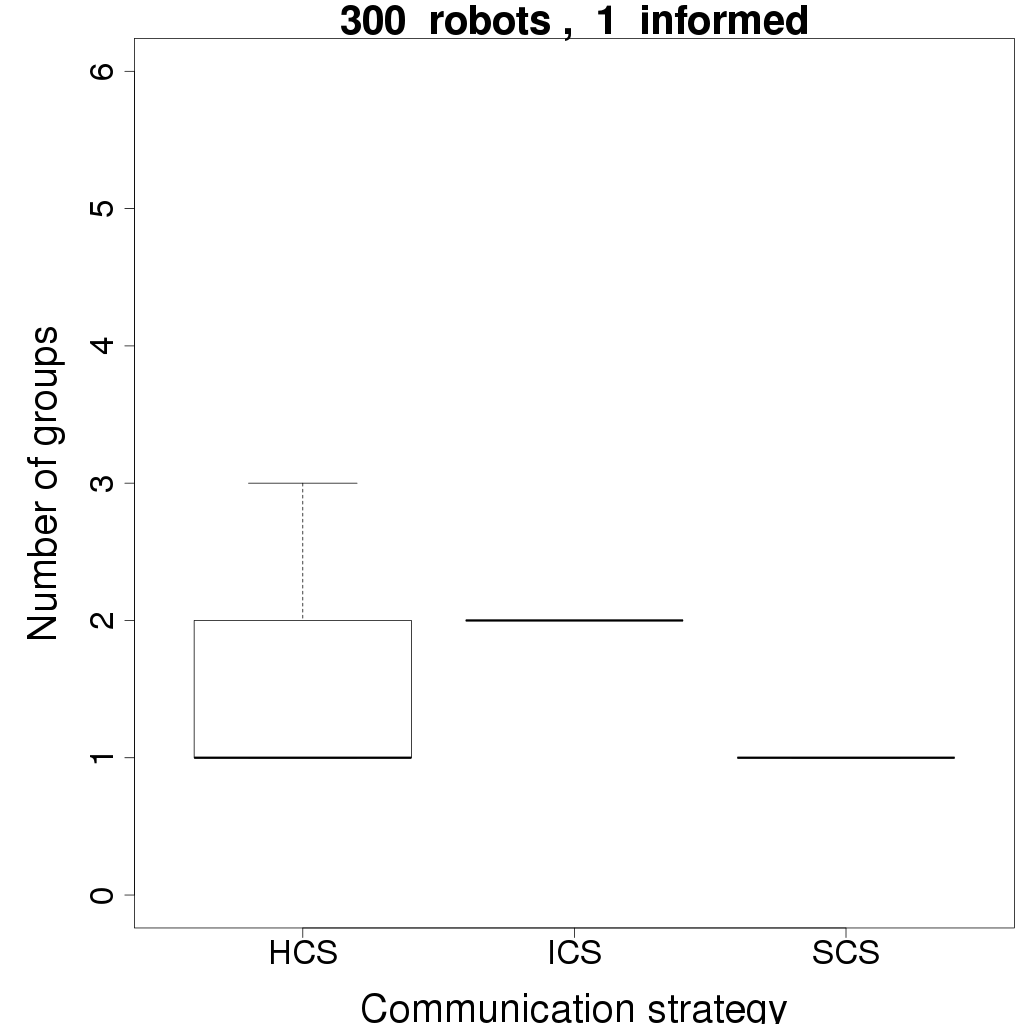
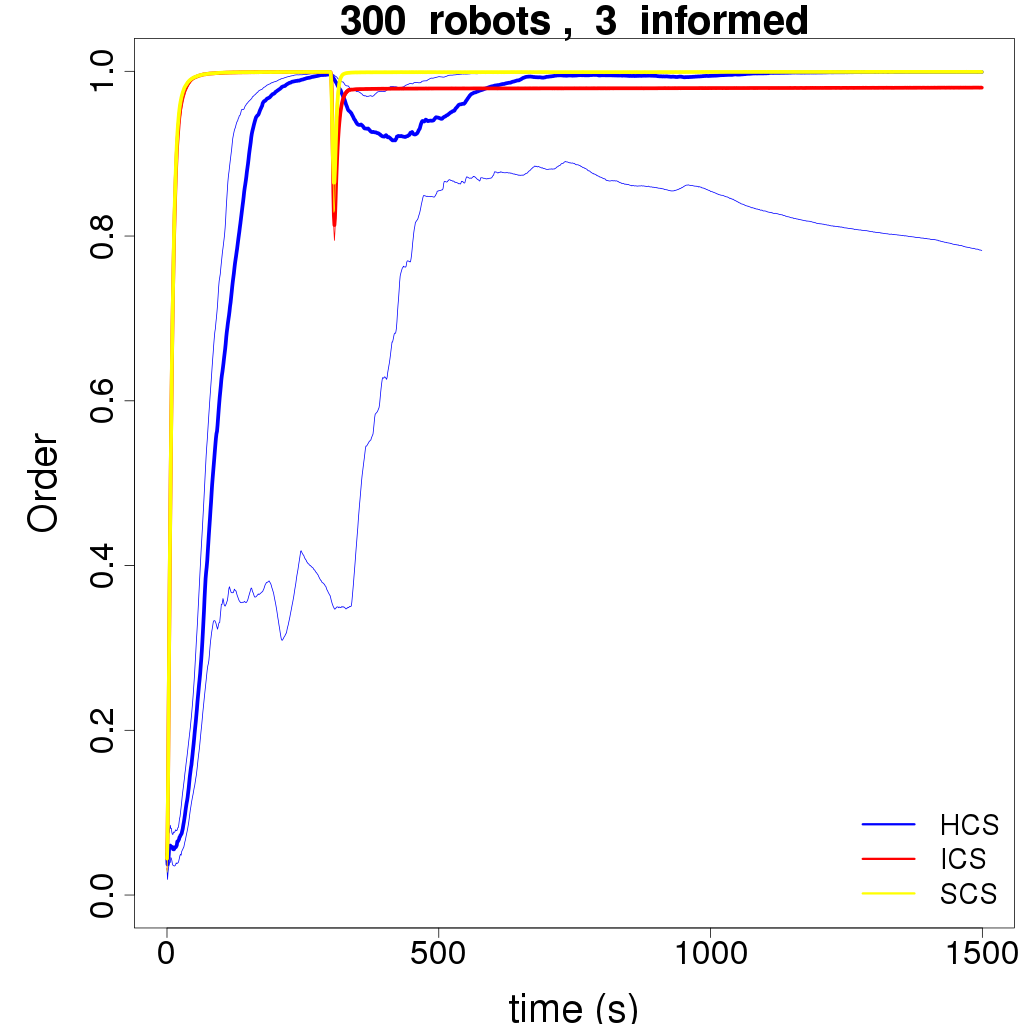
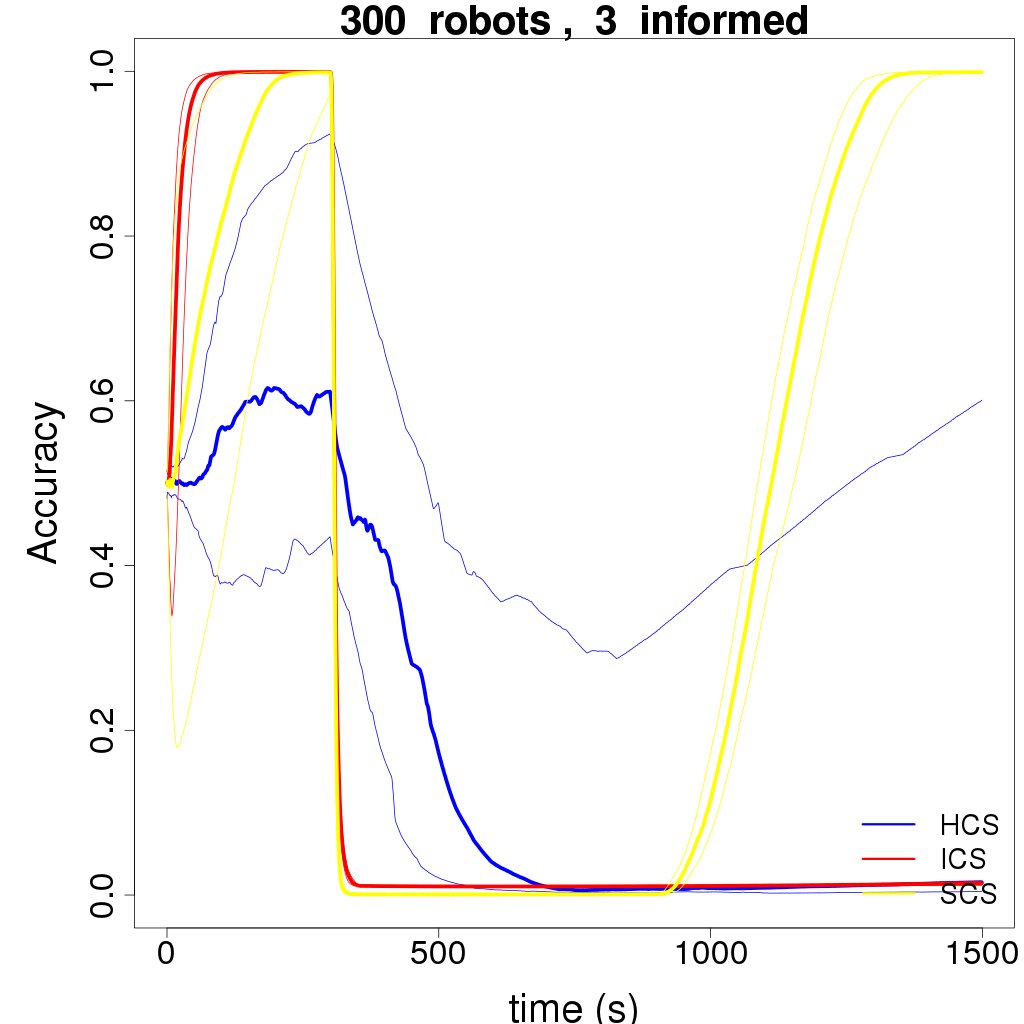
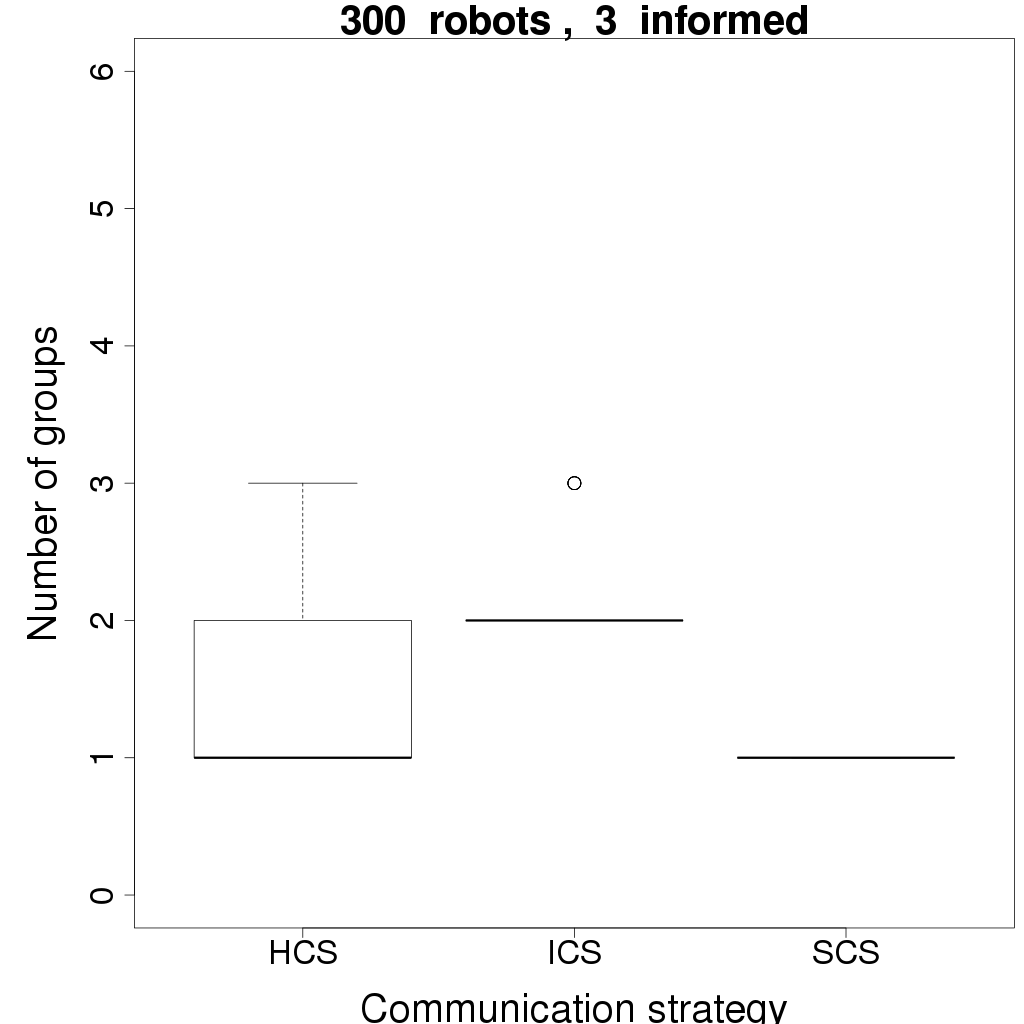
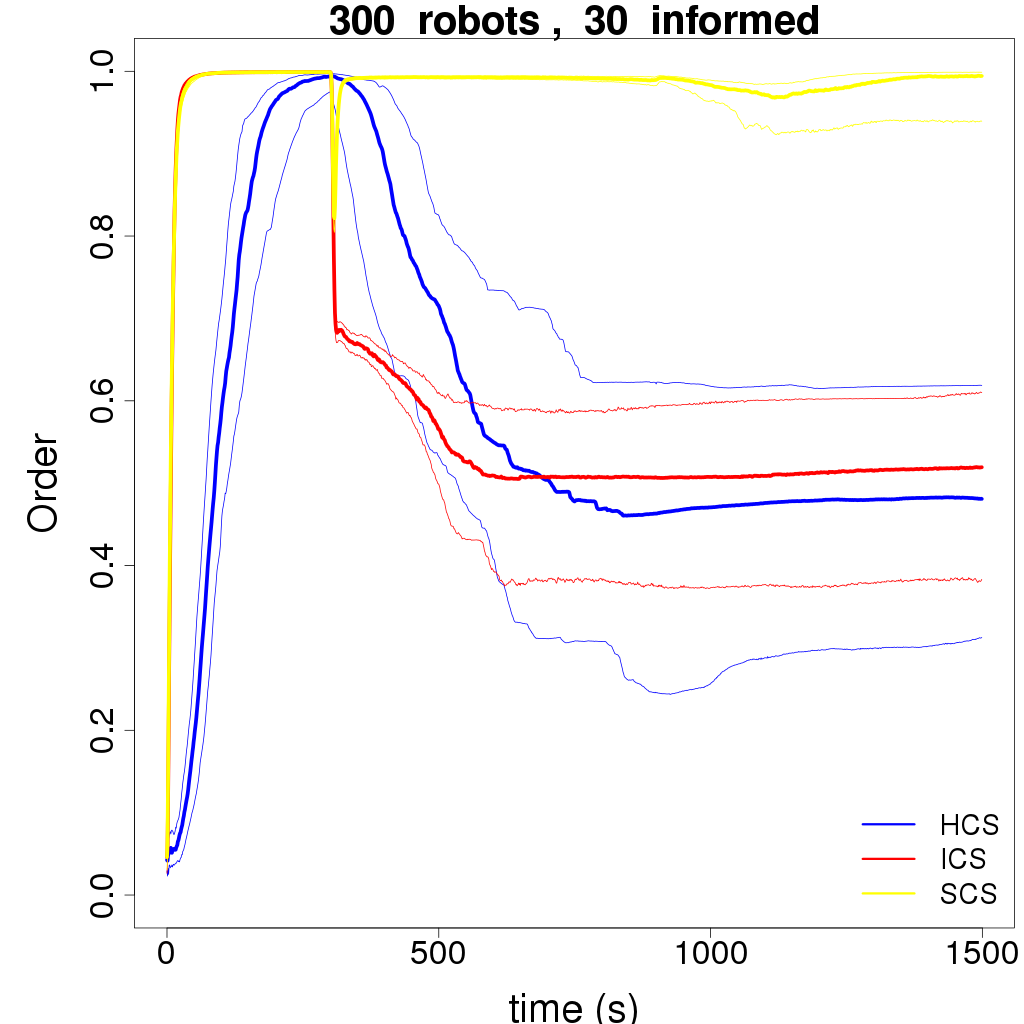
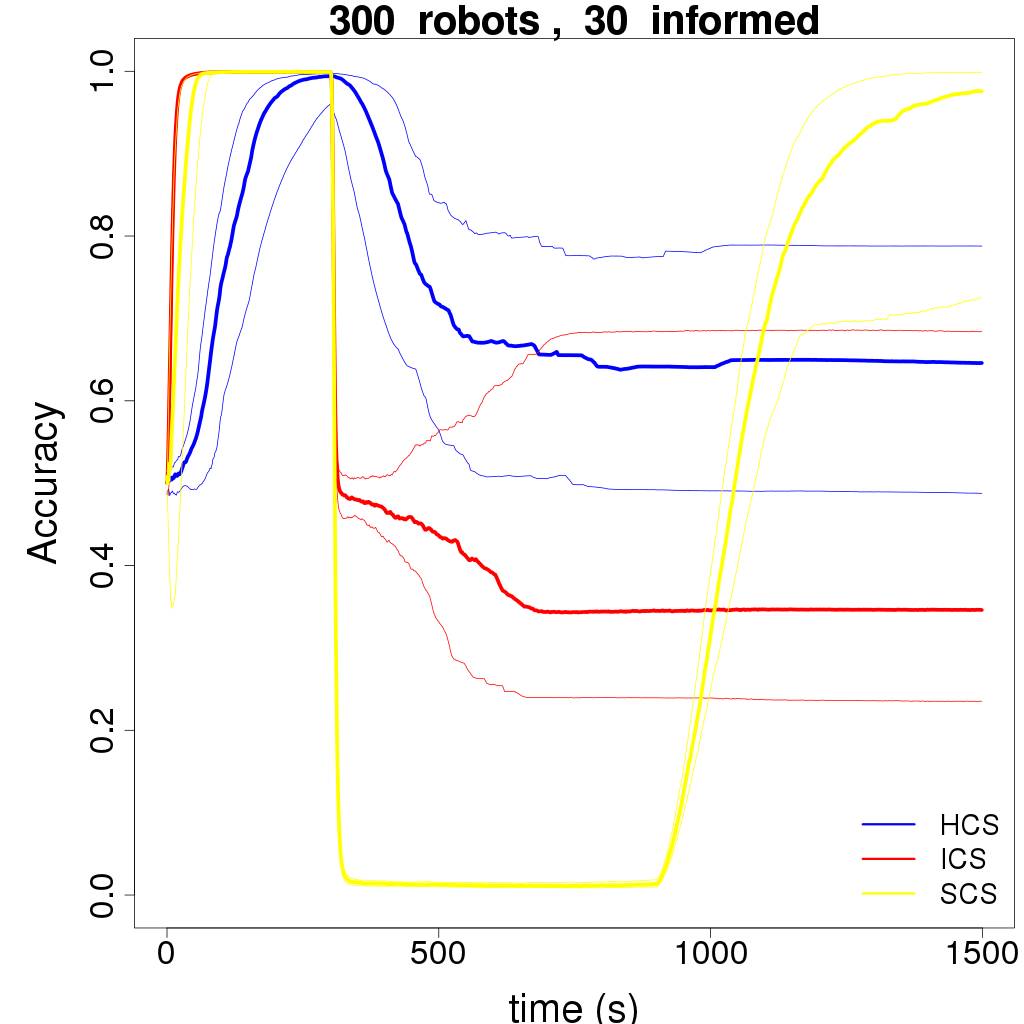
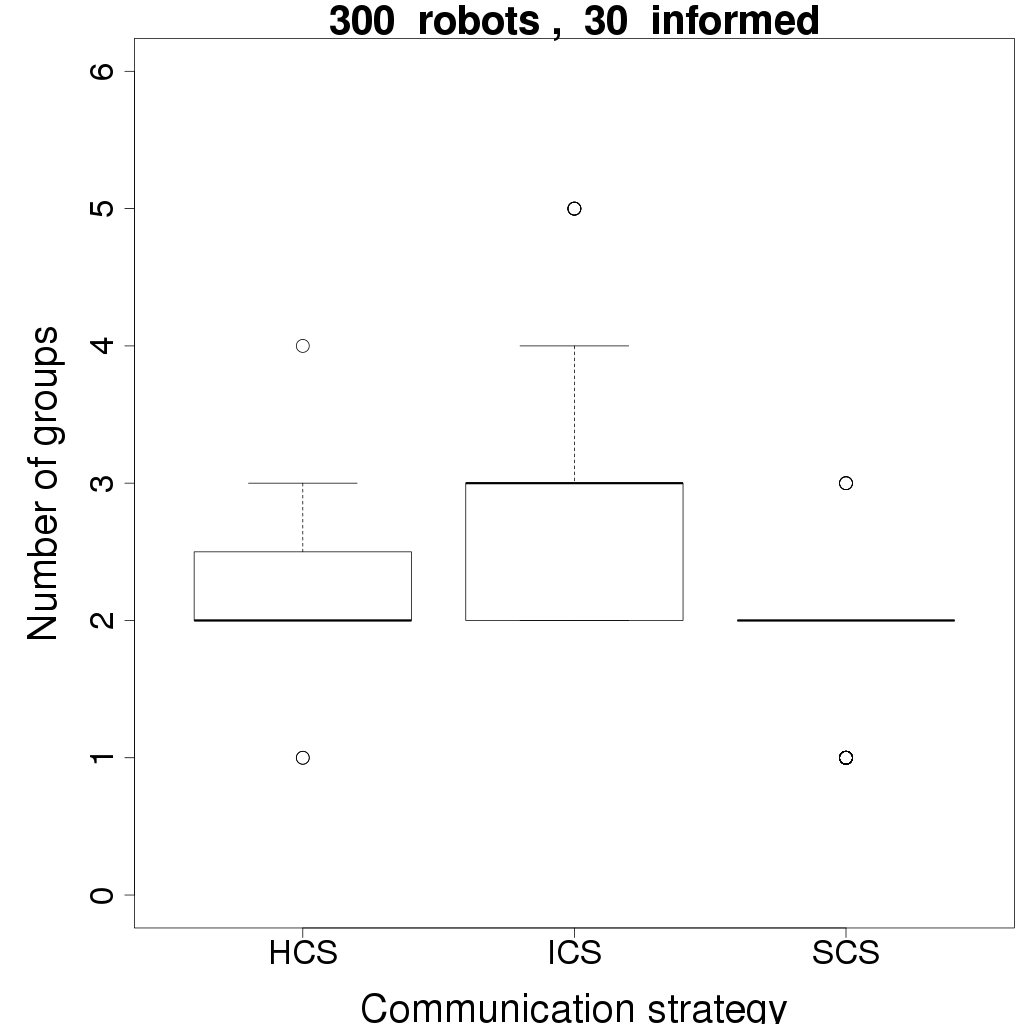
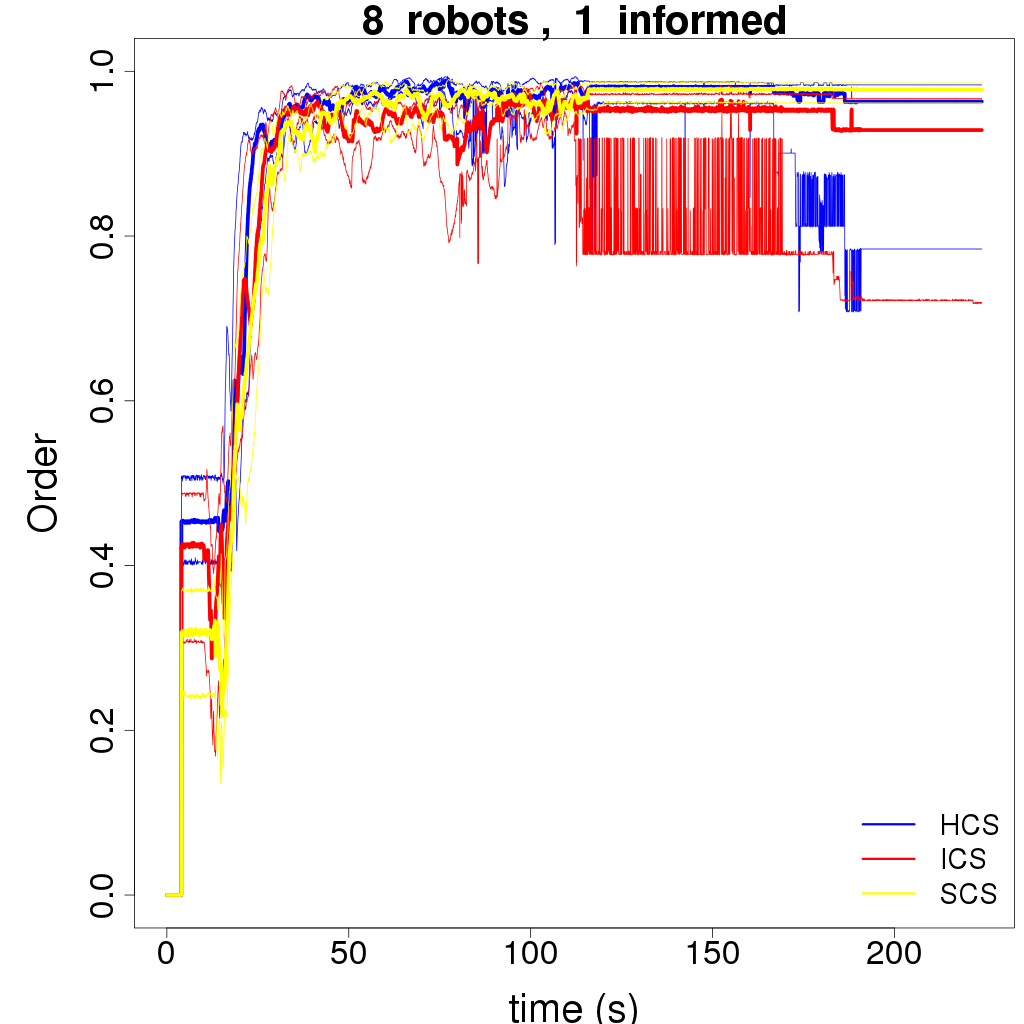
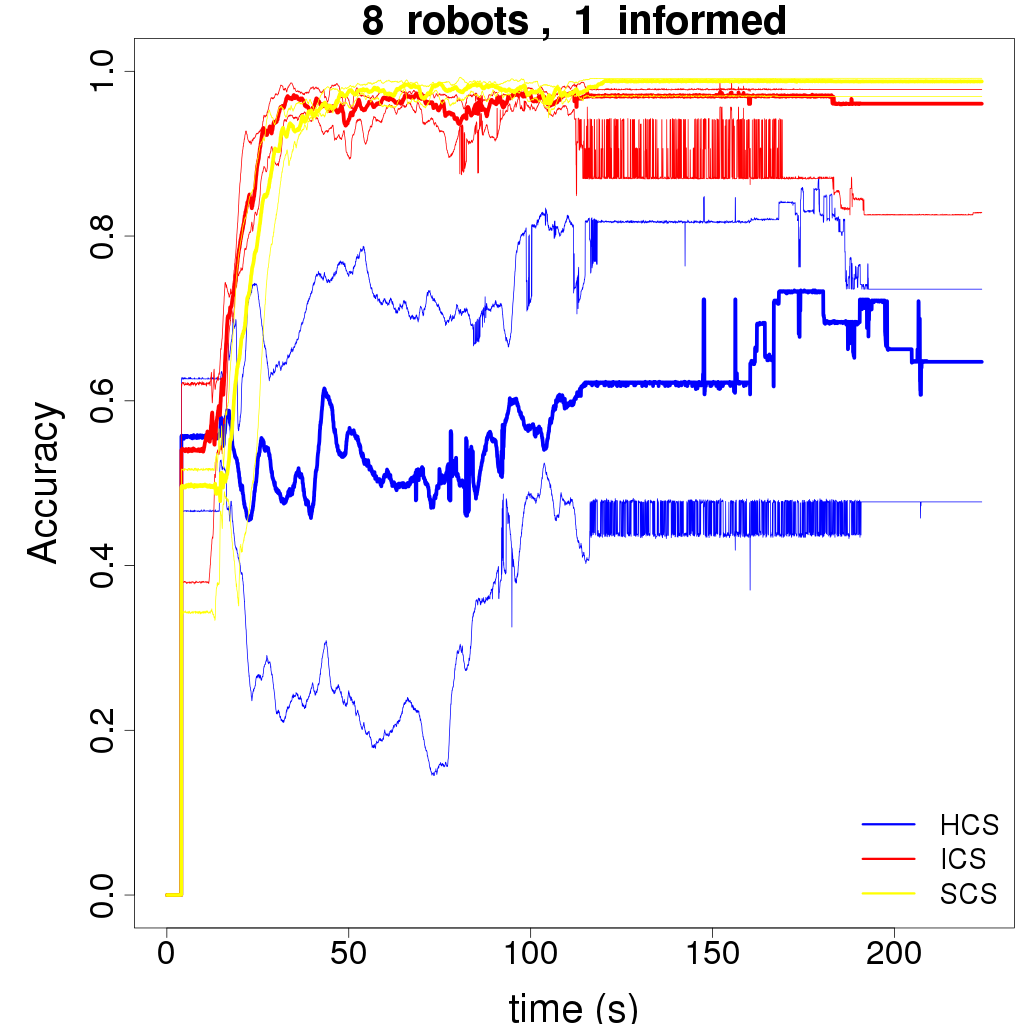
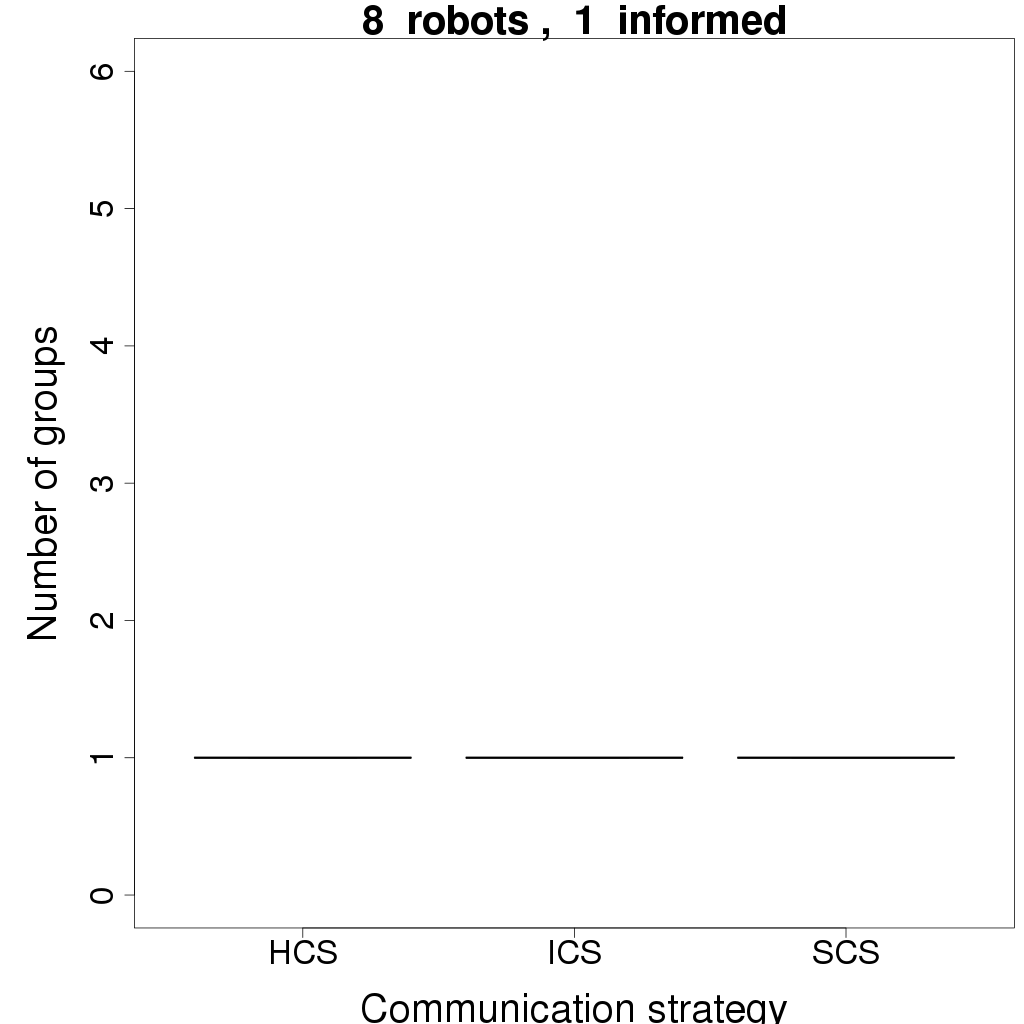
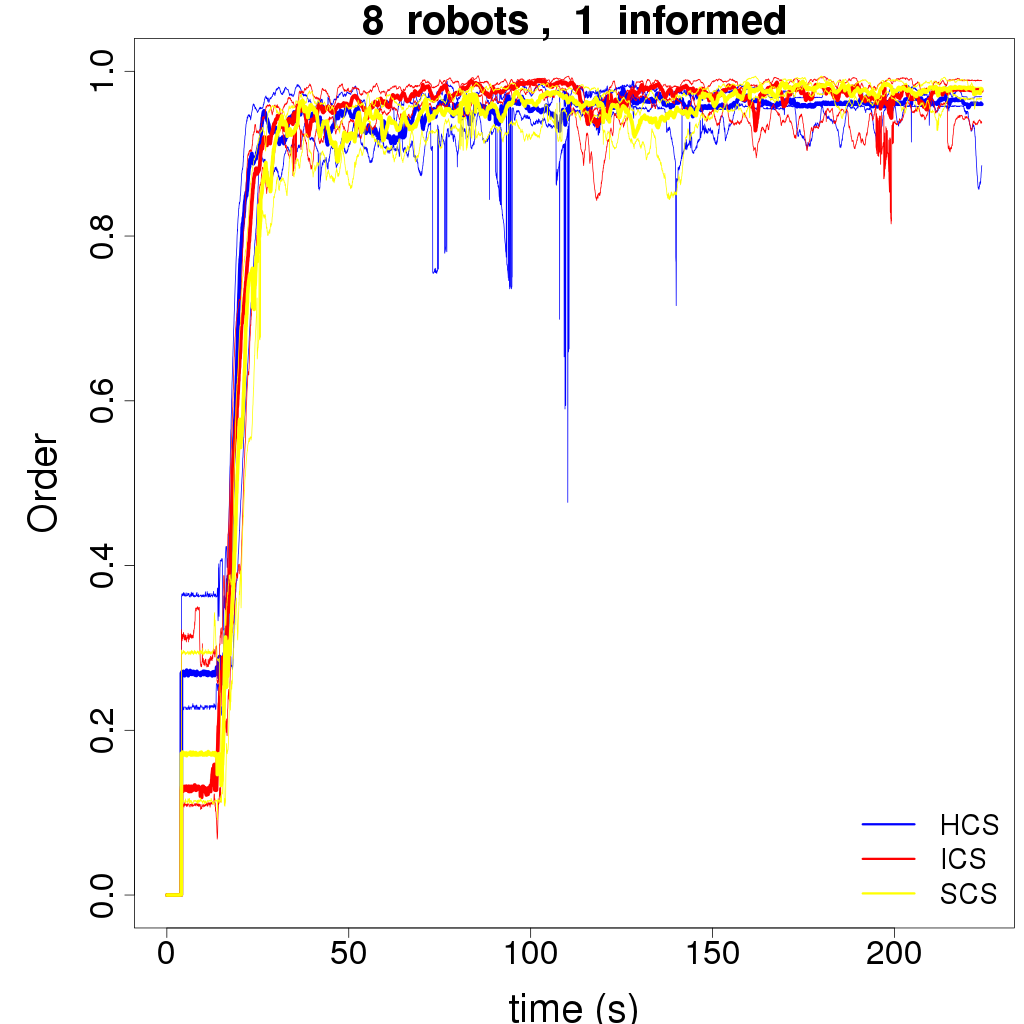
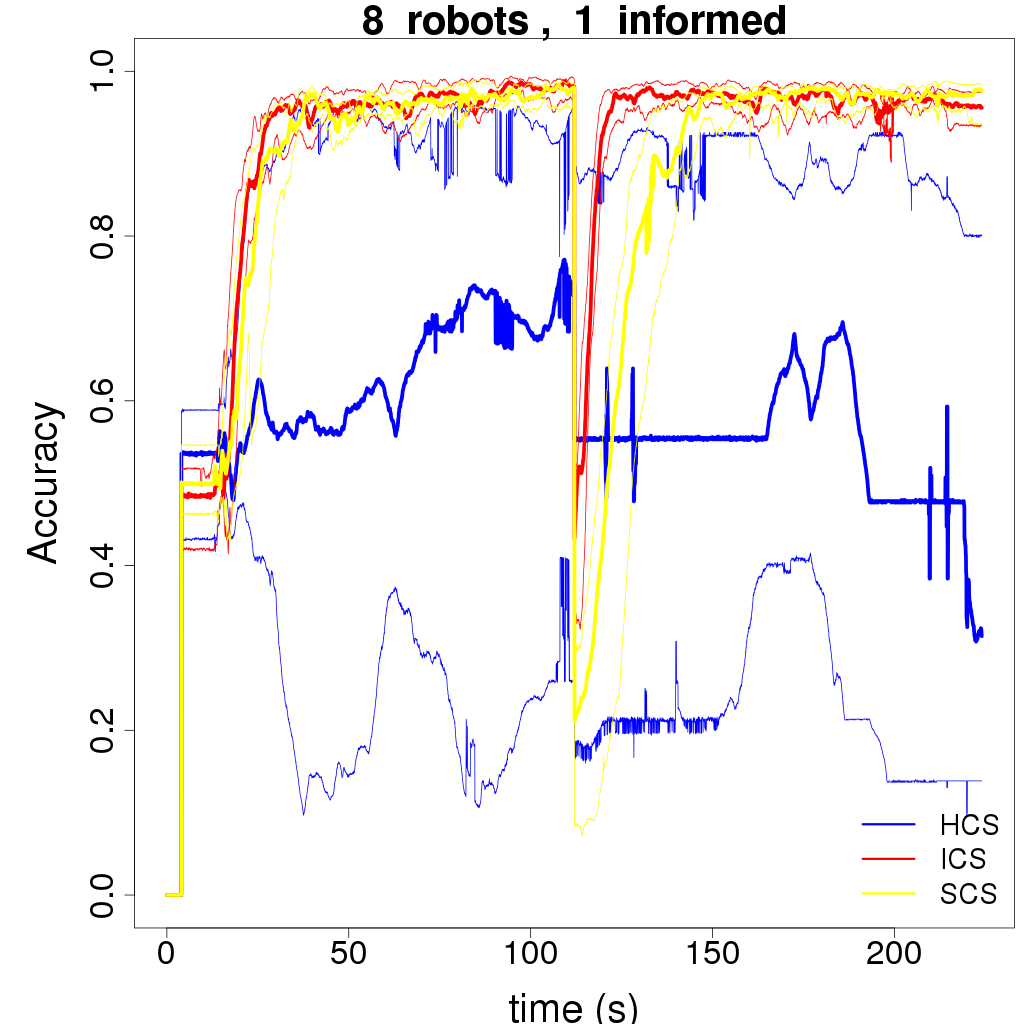
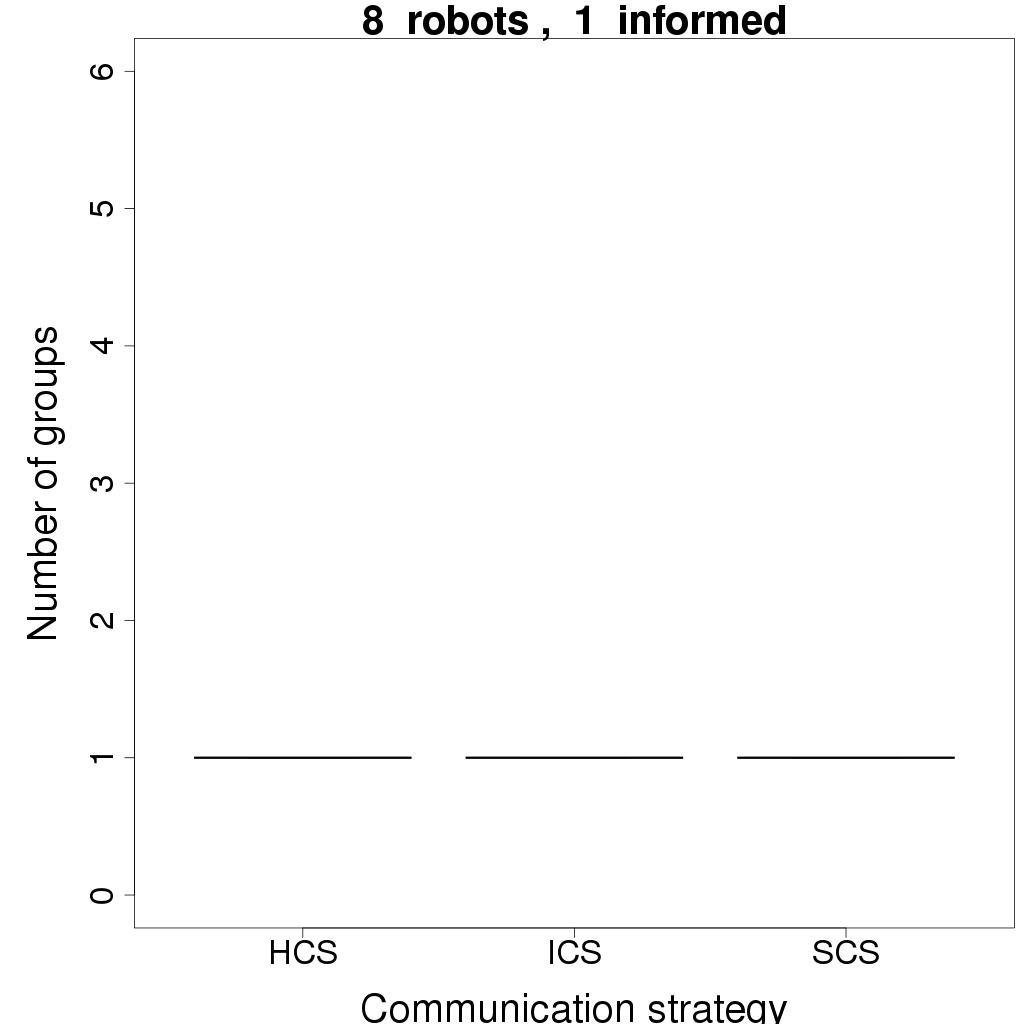
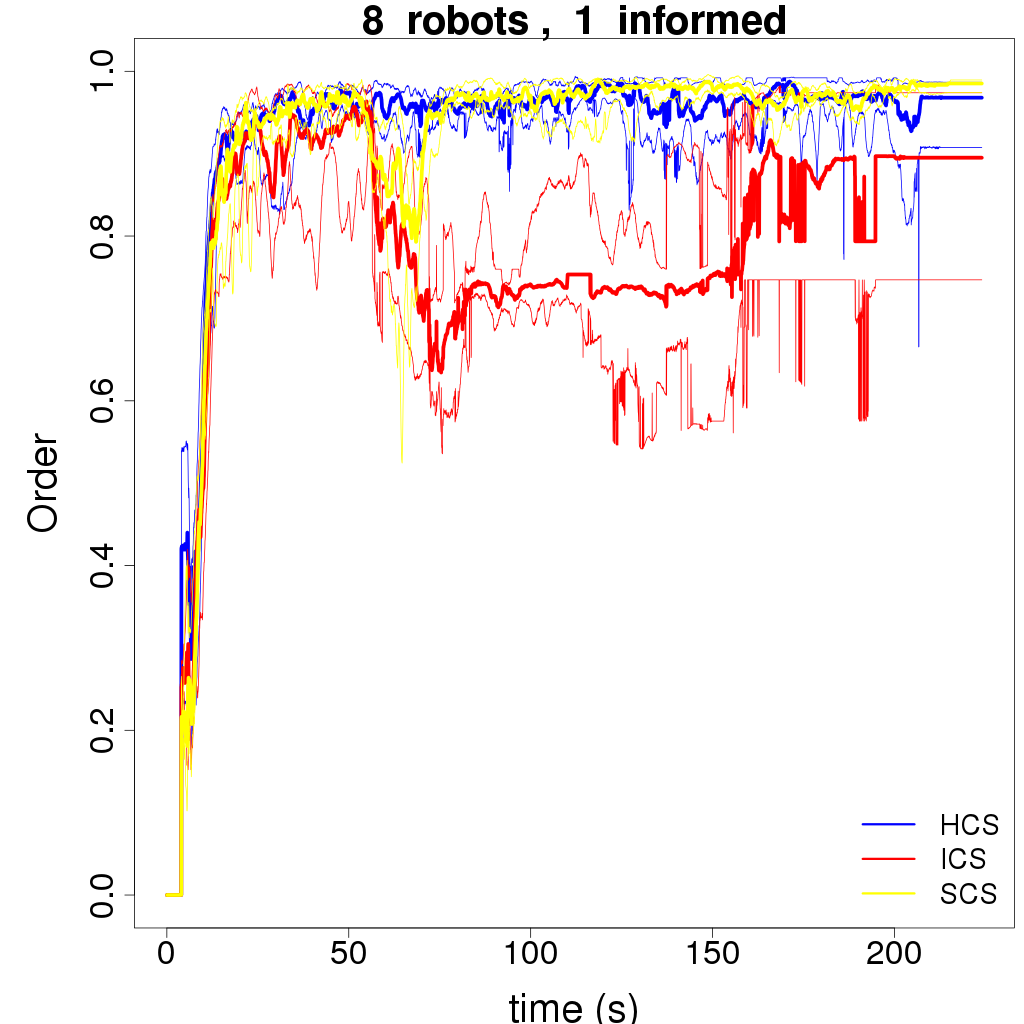
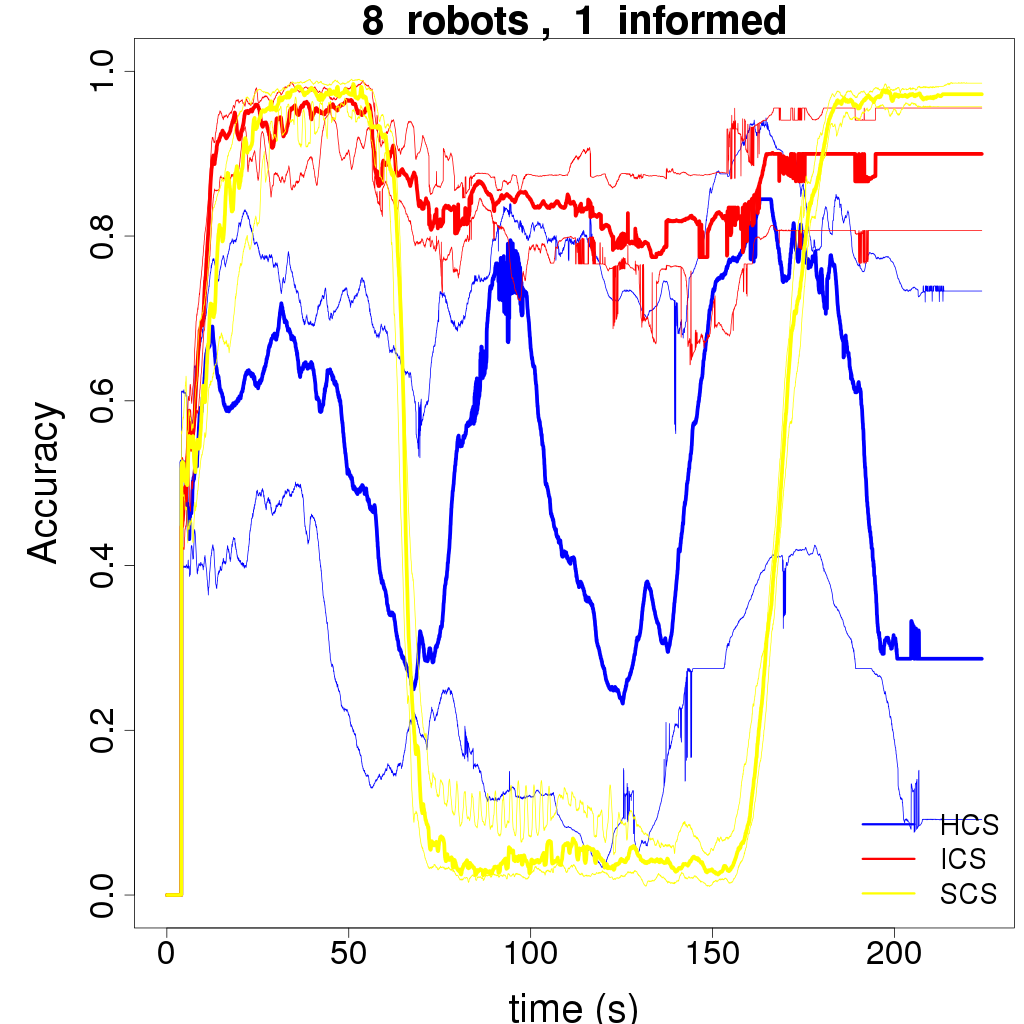
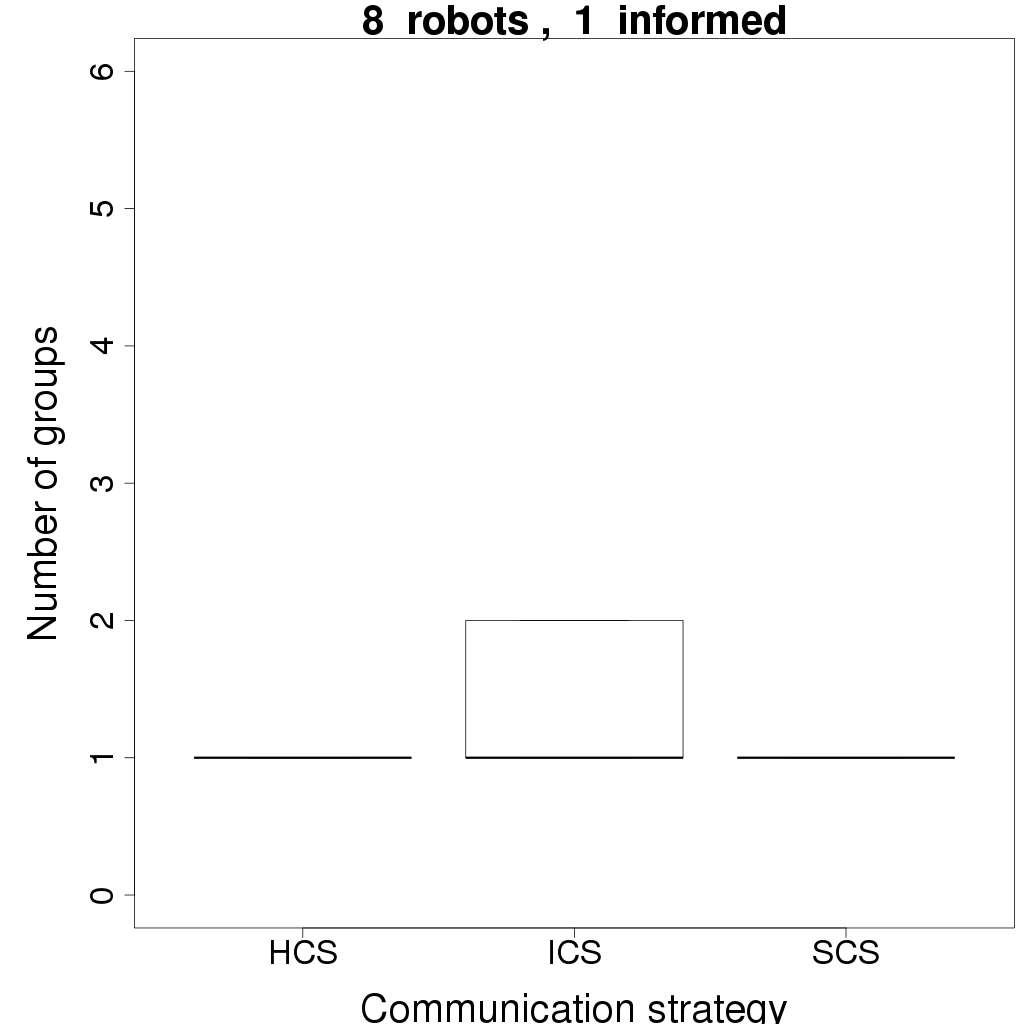
The following figures show the complete set of results that were obtained in simulation.
Non-spatial selection | ||
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Spatial selection | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Non-spatial selection | ||
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Spatial selection | ||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Non-spatial selection | ||
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Spatial selection | ||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
The following figures show the complete set of results that were obtained in simulation.
 |
 |
 |
 |
 |
 |
 |
 |
 |