| 9 agents | ||
|---|---|---|
| 1 Team | 2 Teams | 3 Teams |
 |
 |
 |
| 90 agents | ||
| 10 Teams | 20 Teams | 30 Teams |
 |
 |
 |
| 900 agents | ||
| 100 Teams | 200 Teams | 300 Teams |
 |
 |
 |
by Marco A. Montes de Oca, Eliseo Ferrante, Alexander Scheidler, Carlo Pinciroli, Mauro Birattari, and Marco Dorigo
November 2010
|
This page contains all supplementary information for the article Majority-Rule Opinion Dynamics with Differential Latency: A Mechanism for Self-Organized Collective Decision-Making. Table of Contents |
Collective decision-making is a process whereby the members of a group decide on a course of action by consensus. In this paper, we propose a collective decision-making mechanism for robot swarms deployed in scenarios in which robots can choose between two actions that have the same effects but that have different execution times. The proposed mechanism allows a swarm composed of robots with no explicit knowledge about the difference in execution times between the two actions to choose the one with the shorter execution time. We use an opinion formation model that captures important elements of the scenarios in which the proposed mechanism can be used in order to predict the system's behavior. The model predicts that when the two actions have different average execution times, the swarm chooses with high probability the action with the shorter average execution time. We validate the model's predictions through a swarm robotics experiment in which robots must choose one of two paths of different length that connect two locations. Thanks to the proposed mechanism, a swarm made of robots that do not measure time or distance is able to choose the shorter path.
Keywords:Opinion Dynamics, Differential Latency, Collective Decision-Making, Self-Organization, Swarm Intelligence, Swarm Robotics.
This video shows the collective decision-making process that results from the application of the majority-rule opinion dynamics model with differential latency as described in the article.
The environment consists of two areas between which the robots must transport objects collectively. These two areas are at the top and bottom parts of a video frame. Connecting these two areas there are two corridors of different length. Each team of robots must choose between these two corridors to go to the target area. At each decision point, there is an LED that helps robots know in which direction to turn. For simplcity, objects are removed from the simulation as soon as they are transported to the target area. Something similar happens with robots once they go back to the starting area.
In this example, a population of 32 robots and 8 teams are used. Initially, 16 robots prefer the left path and 16 robots prefer the right path. Every time a team is formed (at random), the local majority determines which path the team will follow. At the end of the simulation the population achieves consensus on the left path. Note: The speed of the video is 4 times the normal speed of the simulation.
Download the video in AVI format.
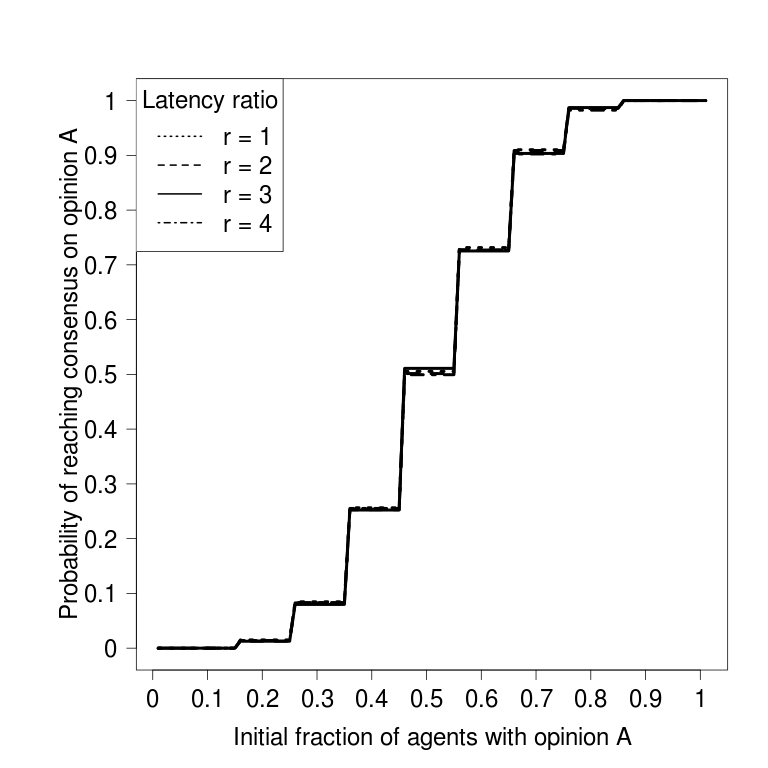
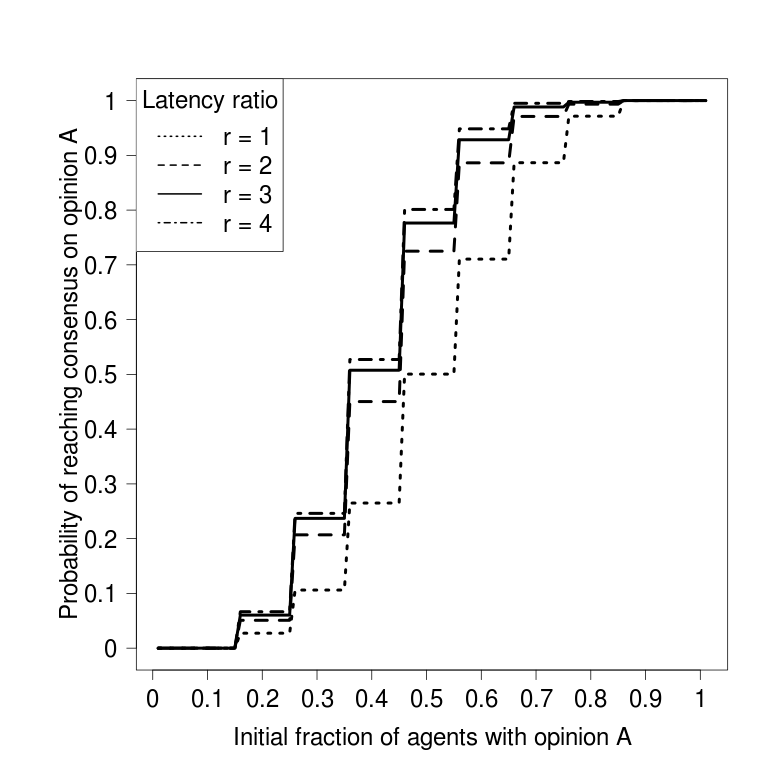
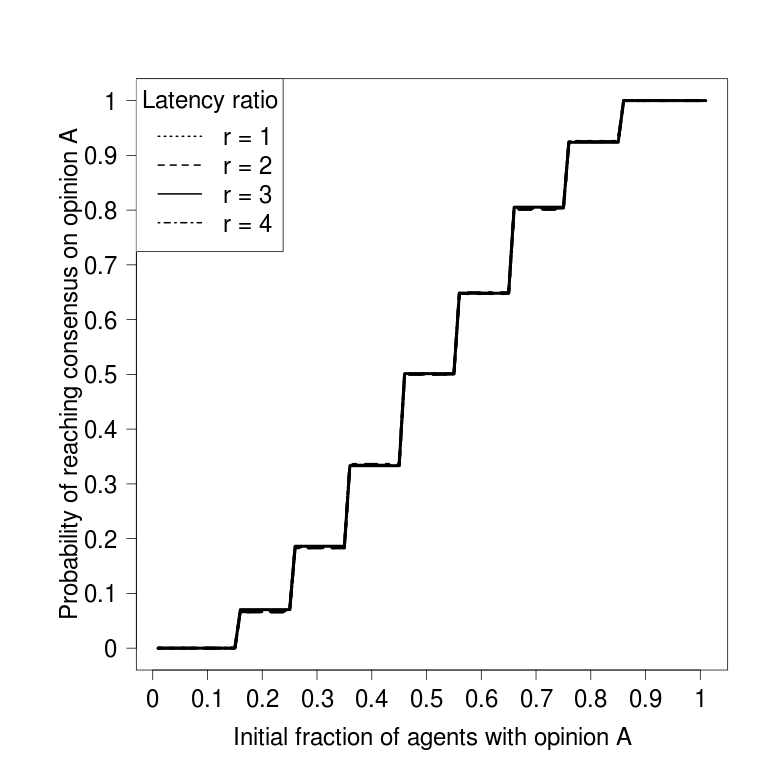
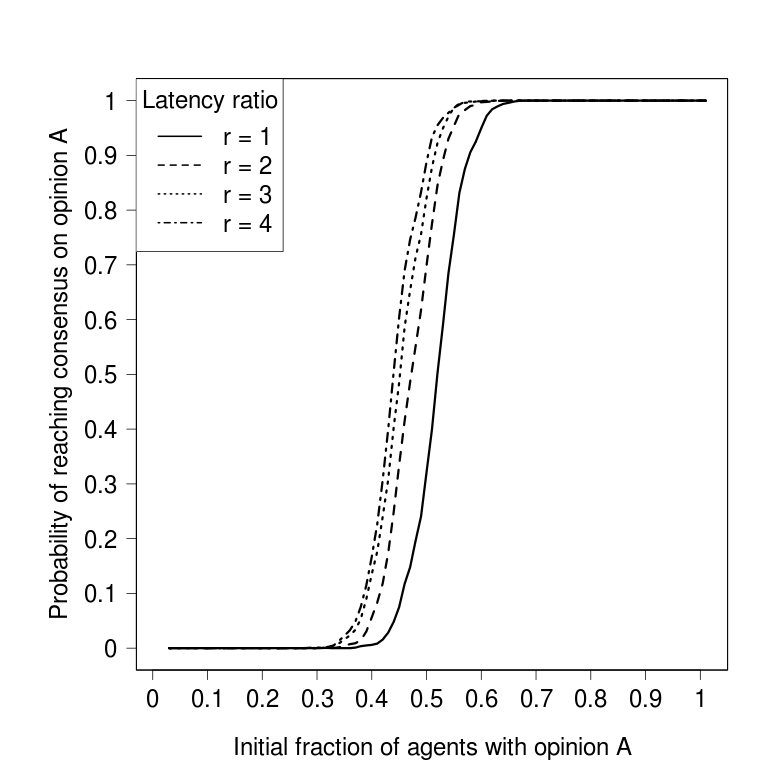
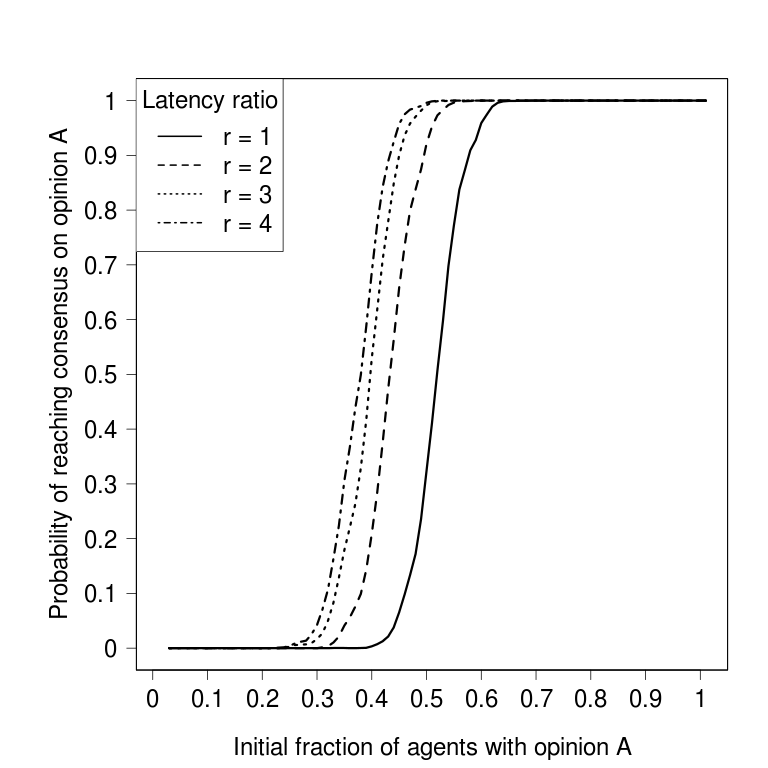
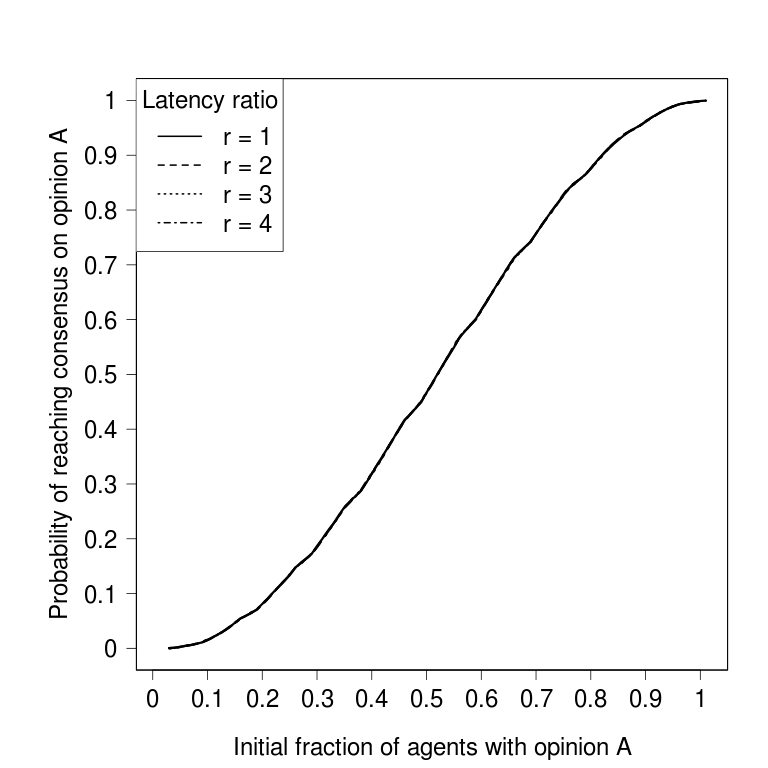
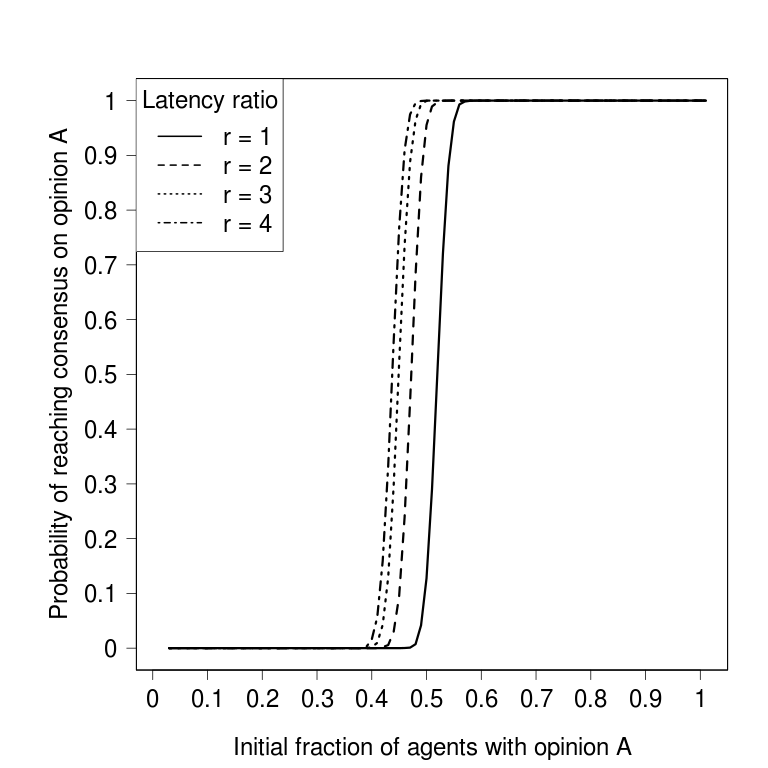
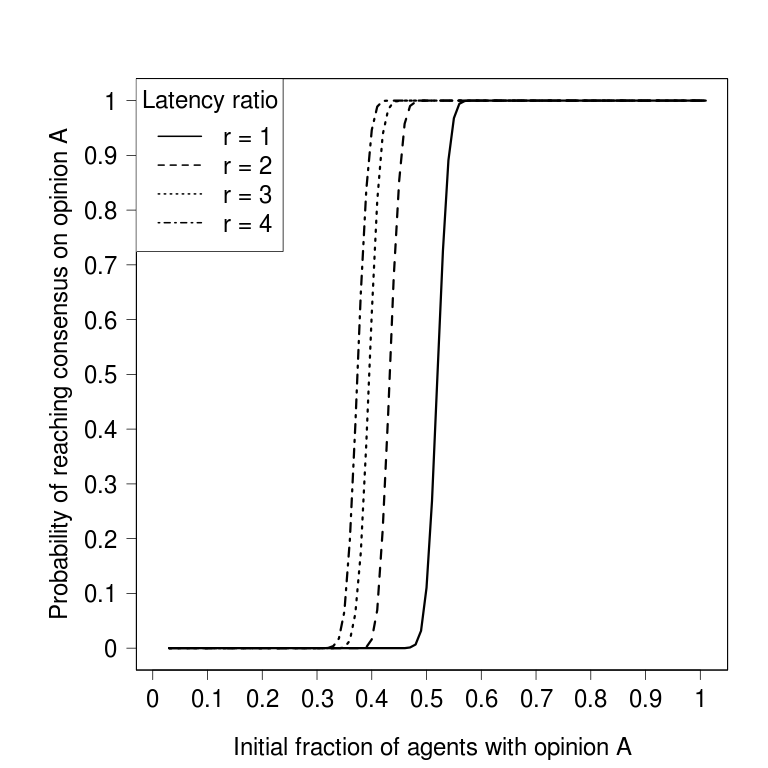
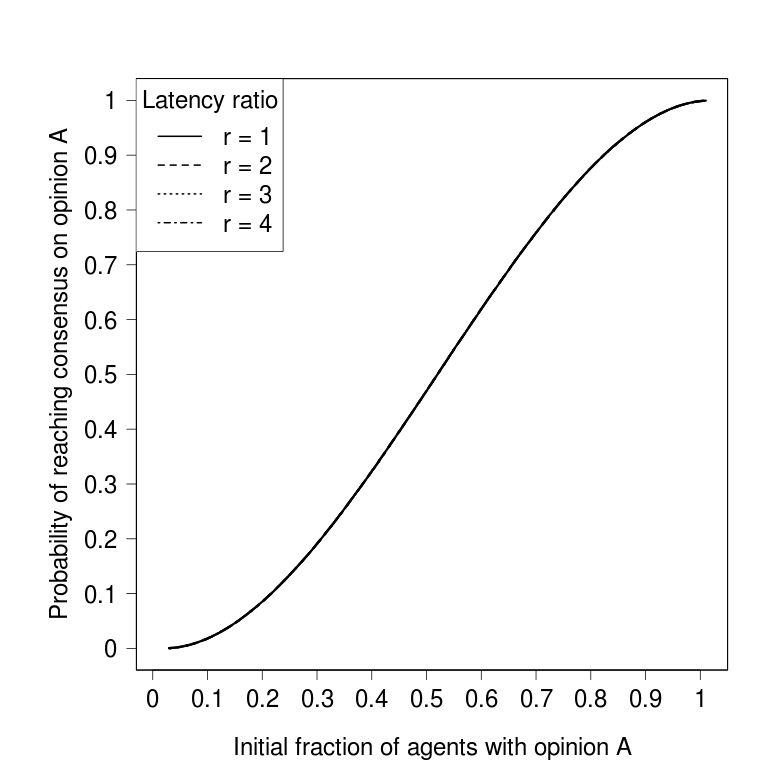
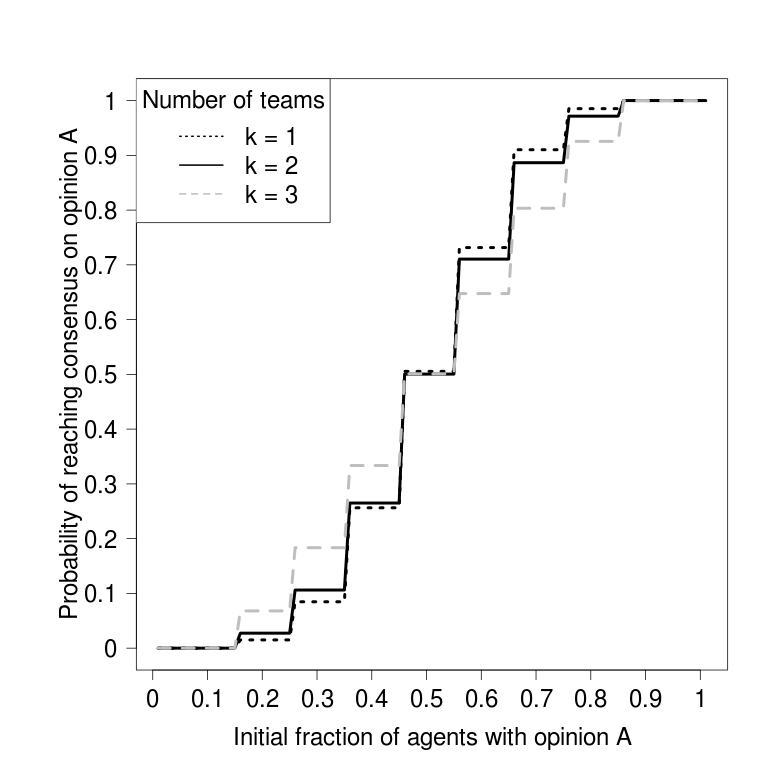
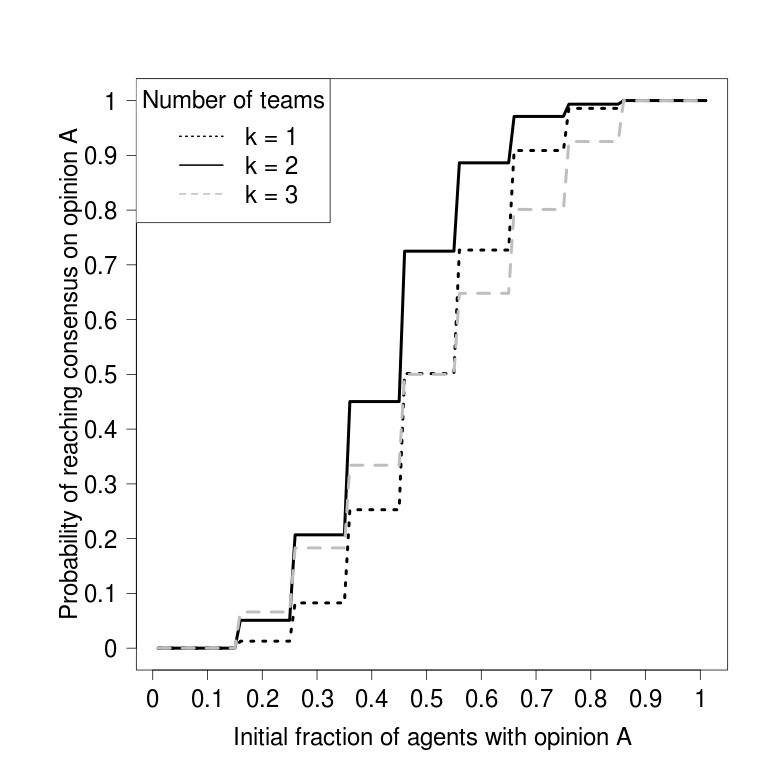
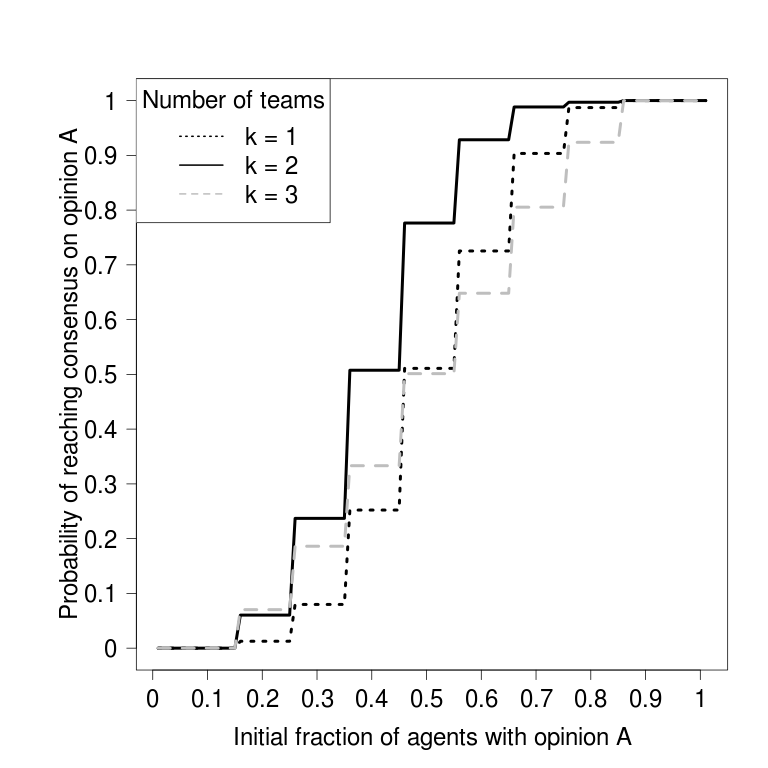
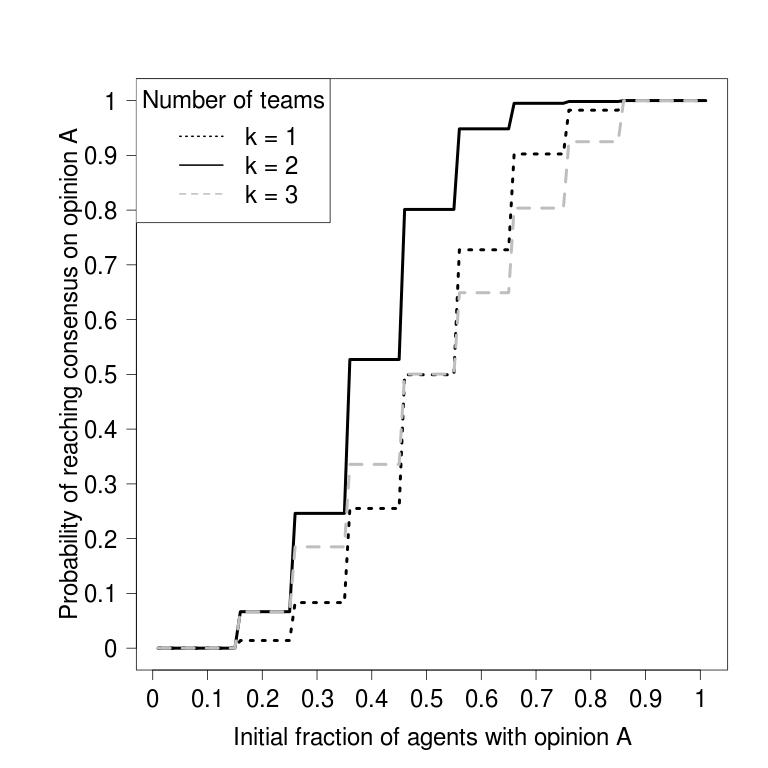
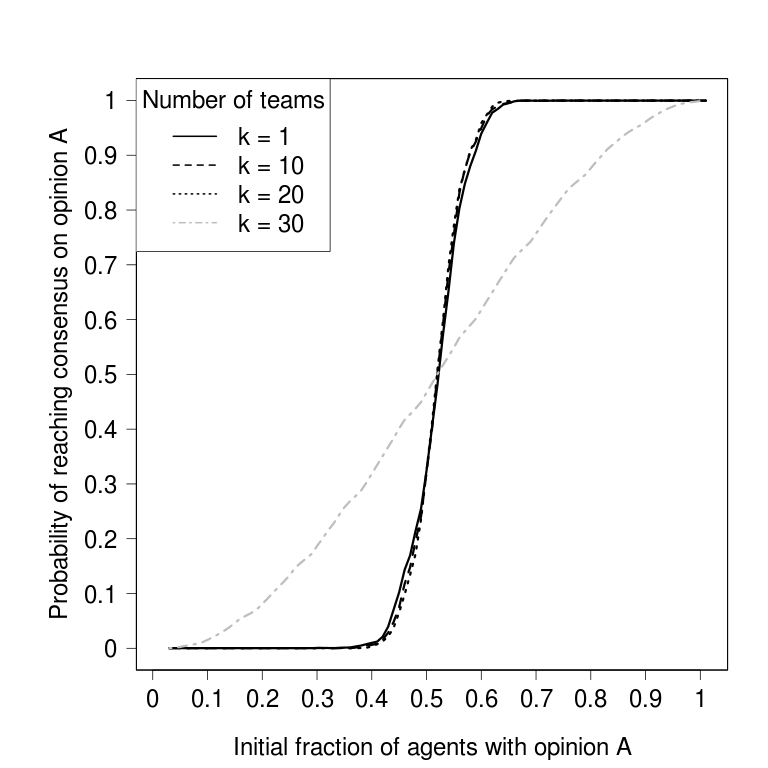
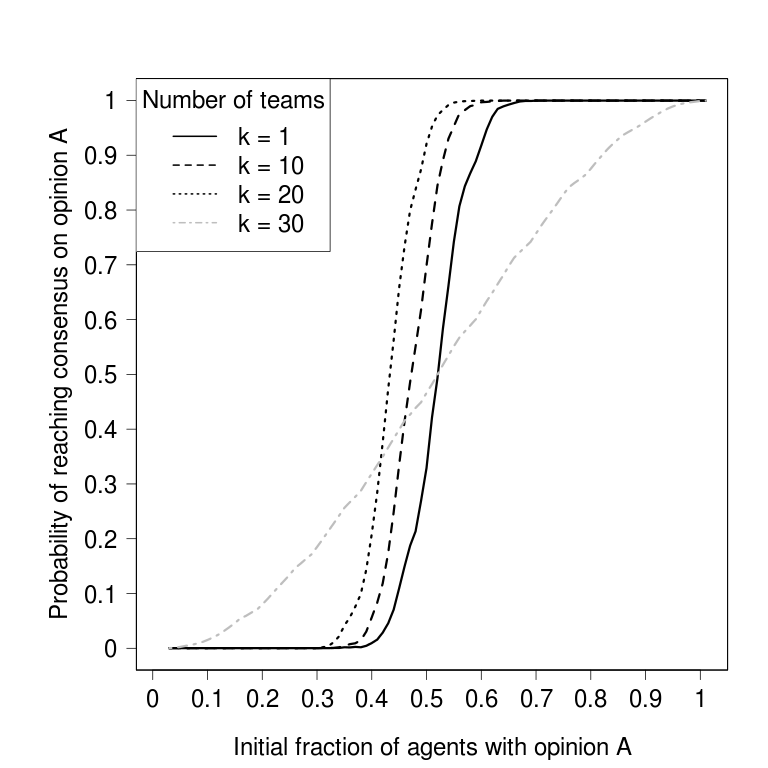
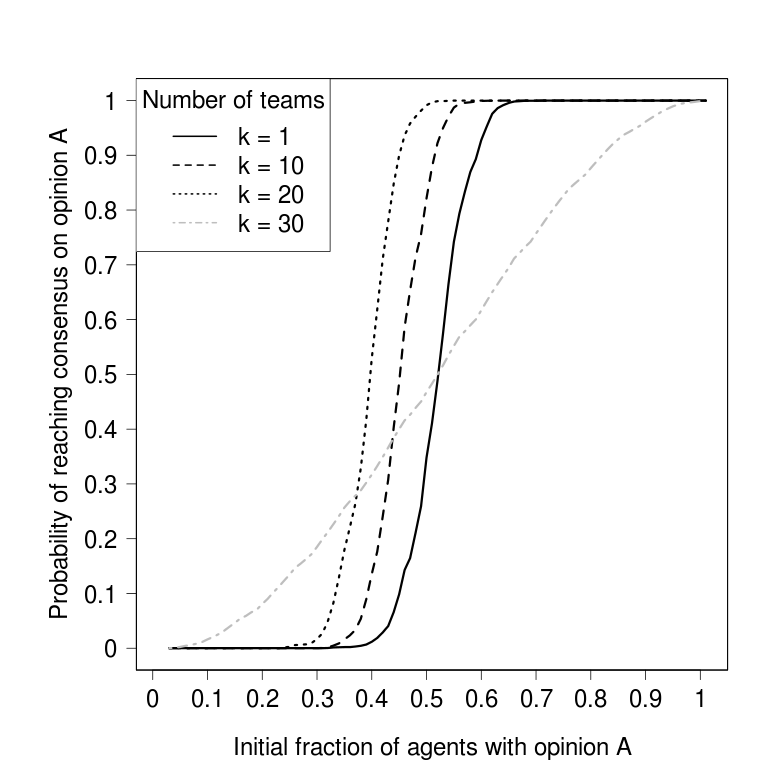
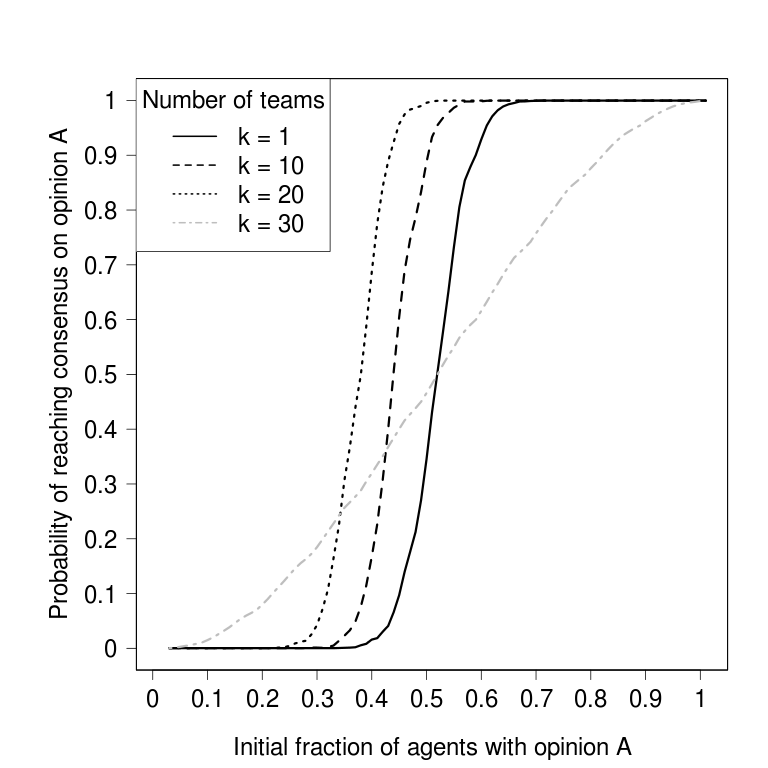
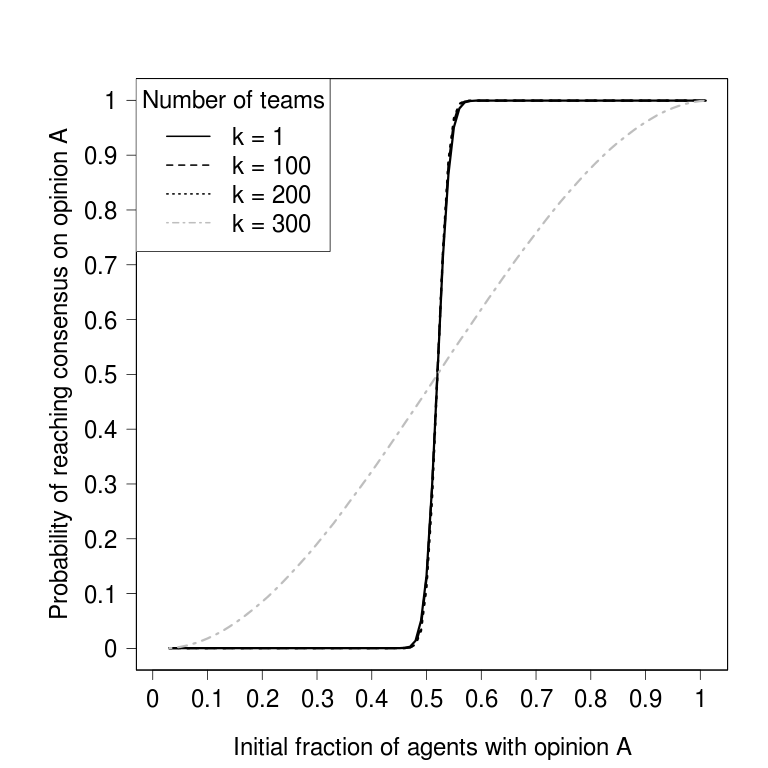
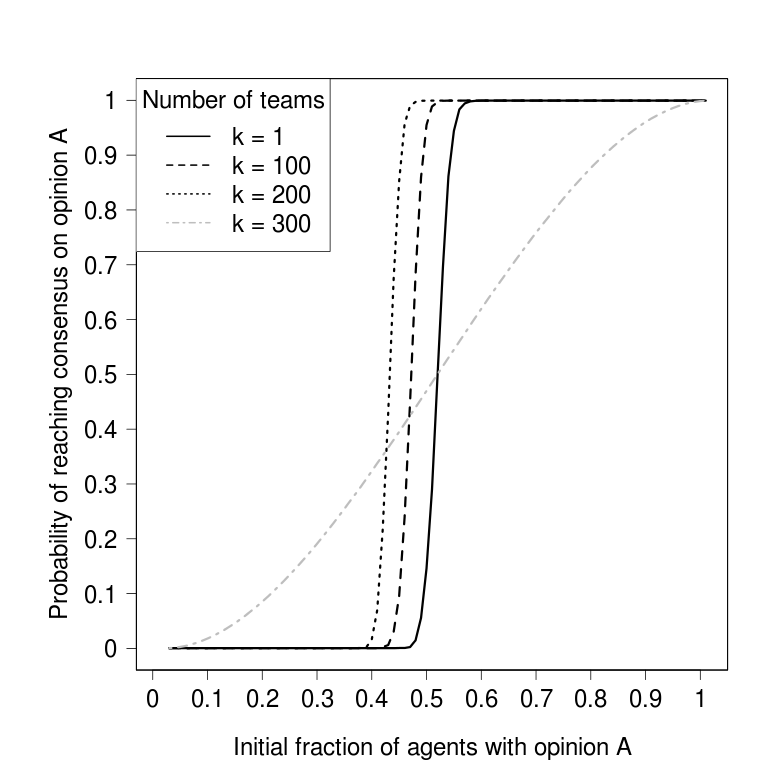
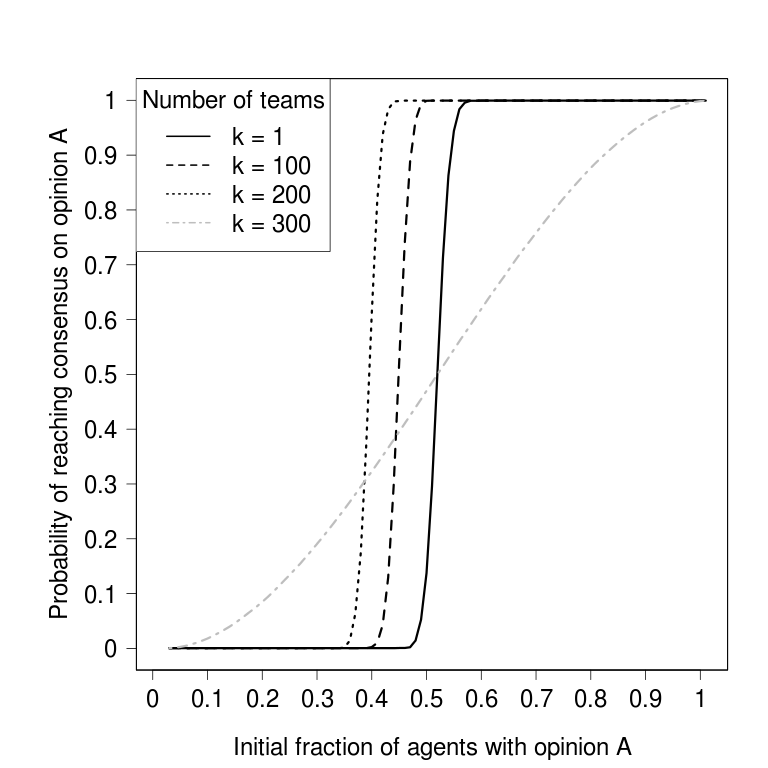
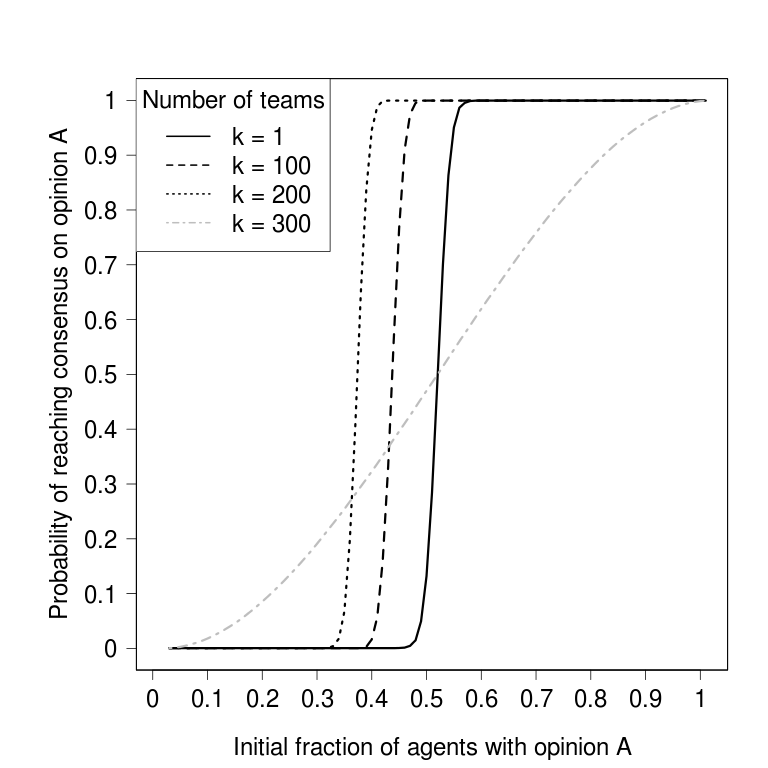
The following figures show the probability of reaching consensus as a function of the initial fraction of agents favoring the opinion associated with the shortest latency period.
| 9 agents | ||
|---|---|---|
| 1 Team | 2 Teams | 3 Teams |
|
|
|
| 90 agents | ||
| 10 Teams | 20 Teams | 30 Teams |
|
|
|
| 900 agents | ||
| 100 Teams | 200 Teams | 300 Teams |
|
|
|
| 9 agents | |||
|---|---|---|---|
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
 |
| 90 agents | |||
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
 |
| 900 agents | |||
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
 |
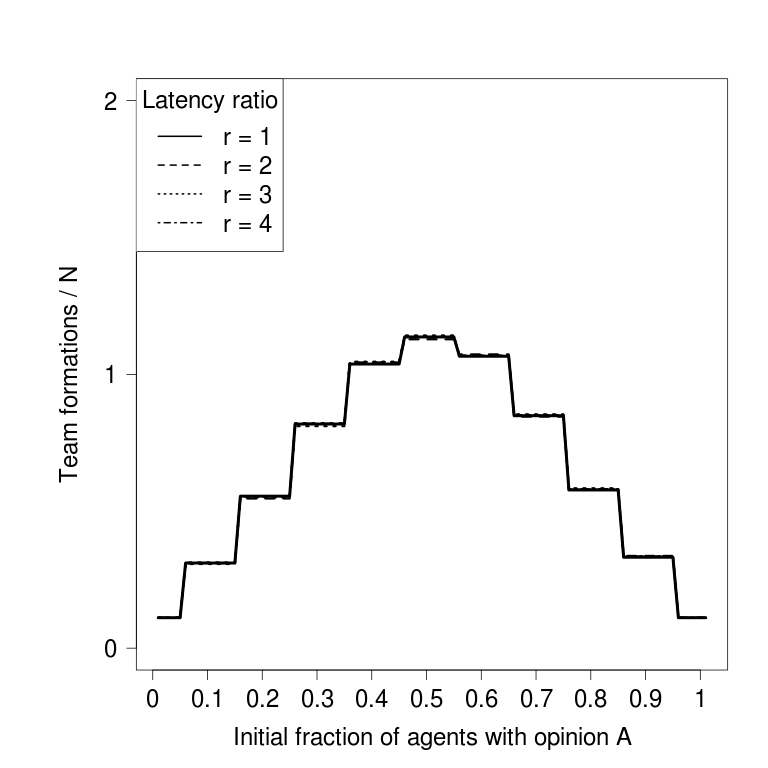
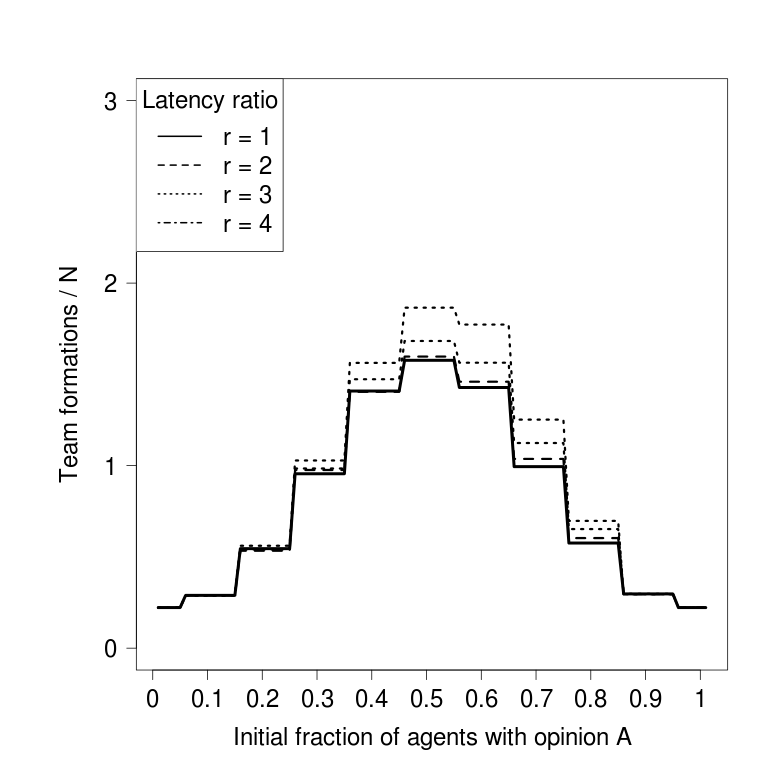
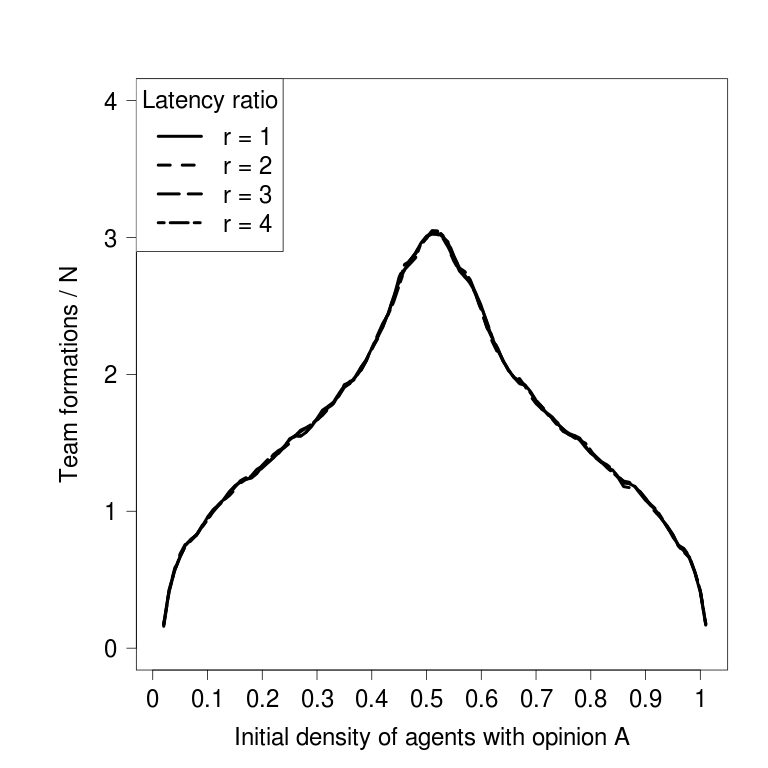
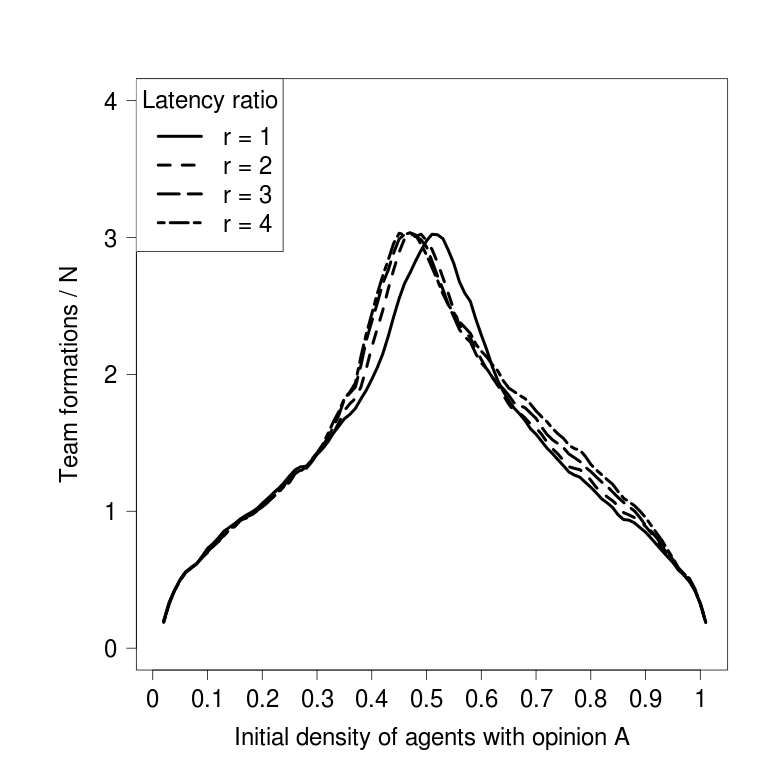
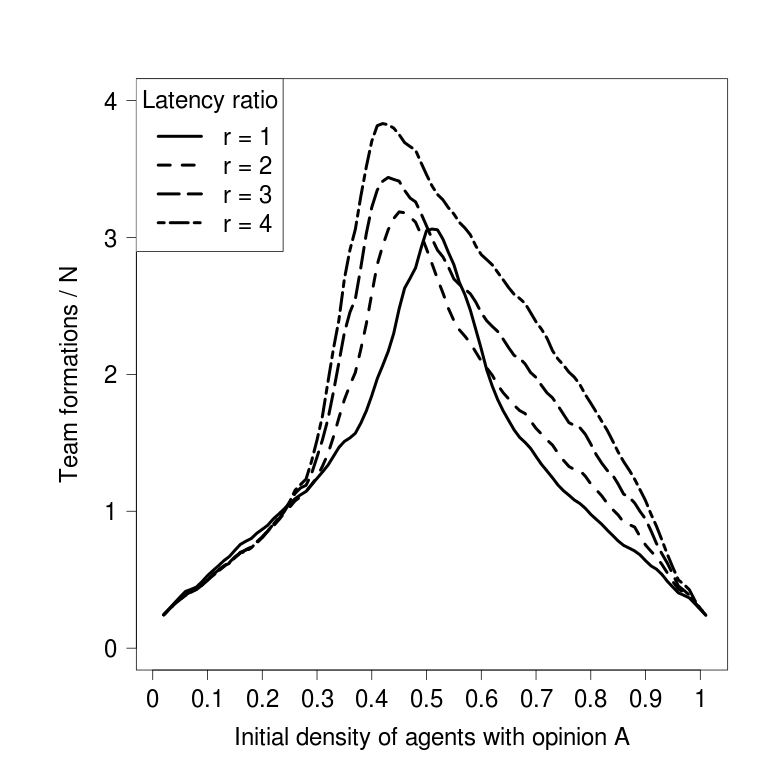
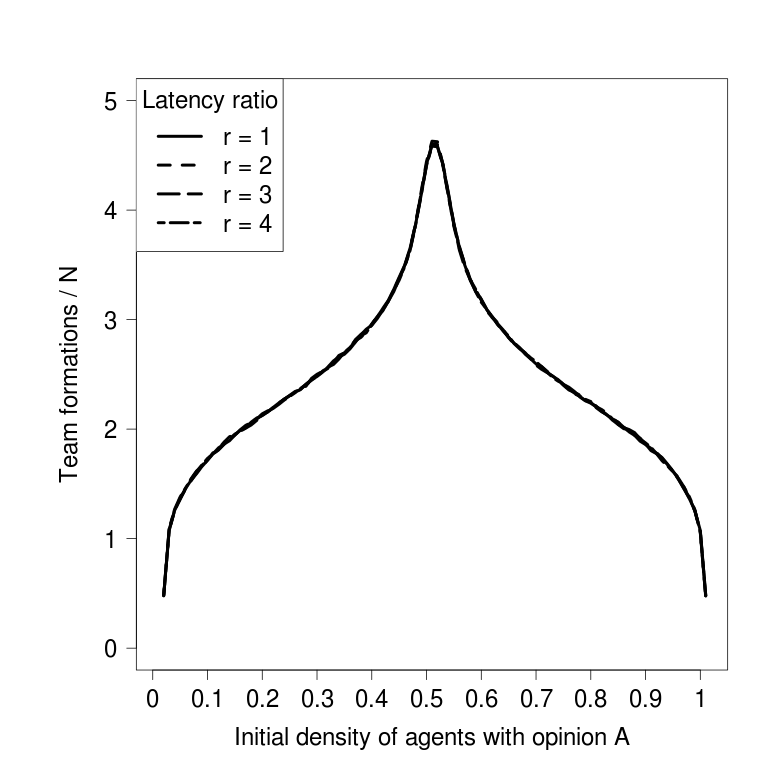
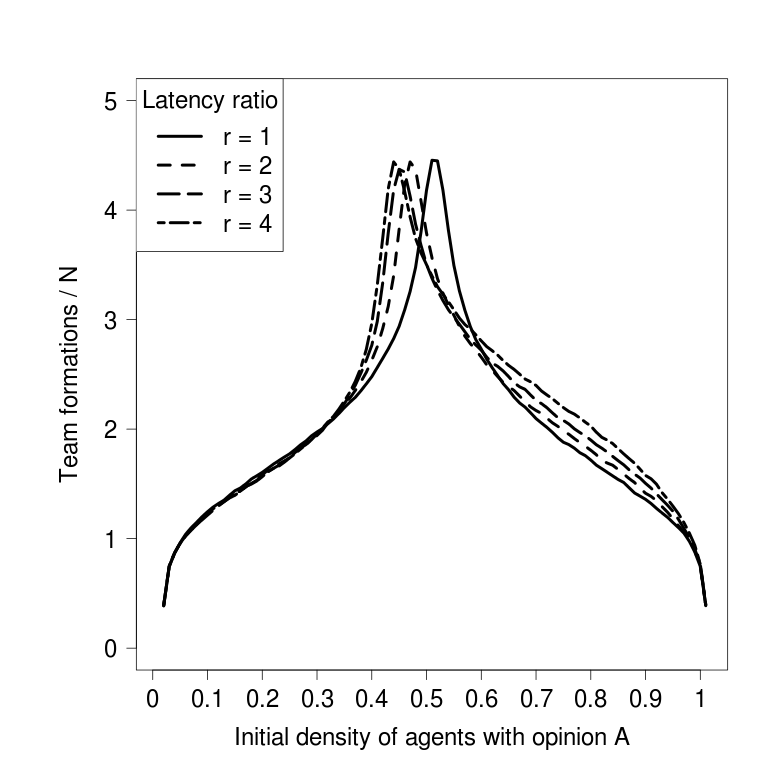
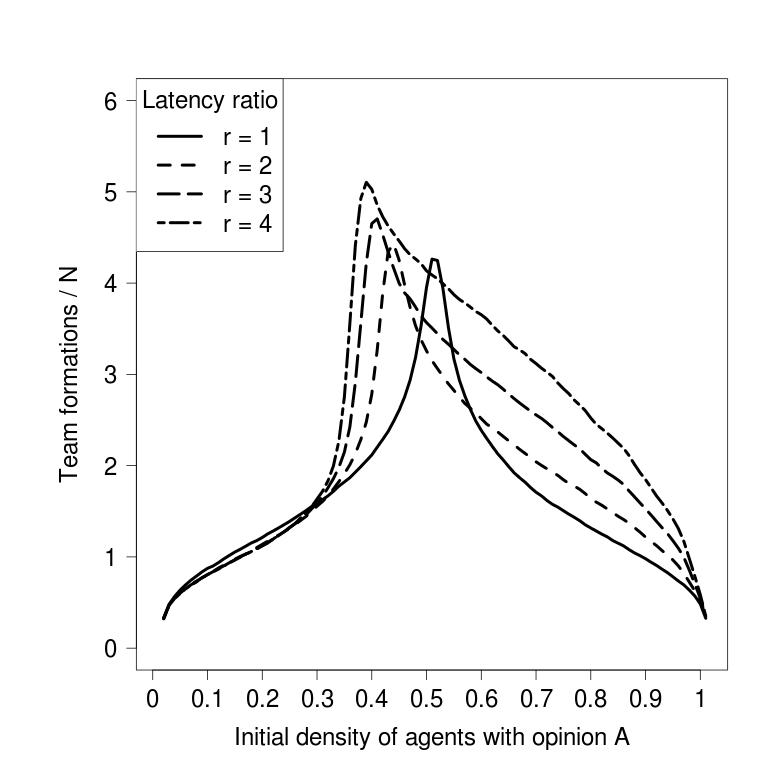
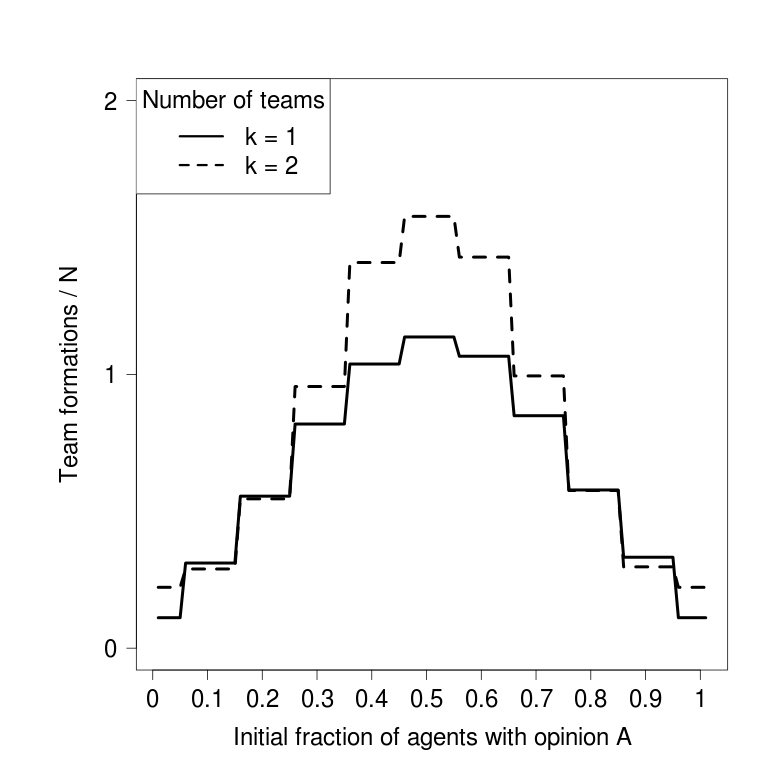
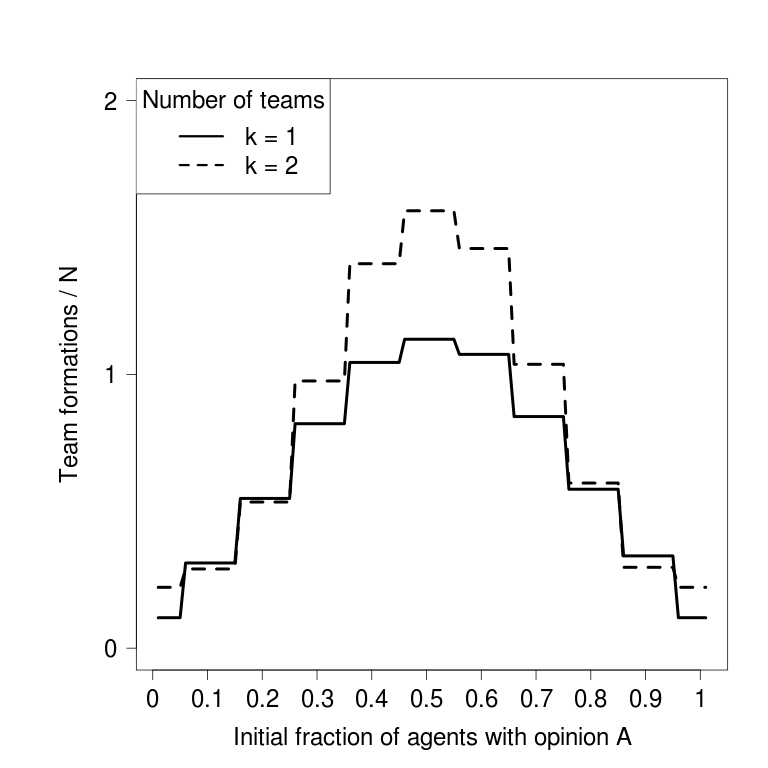
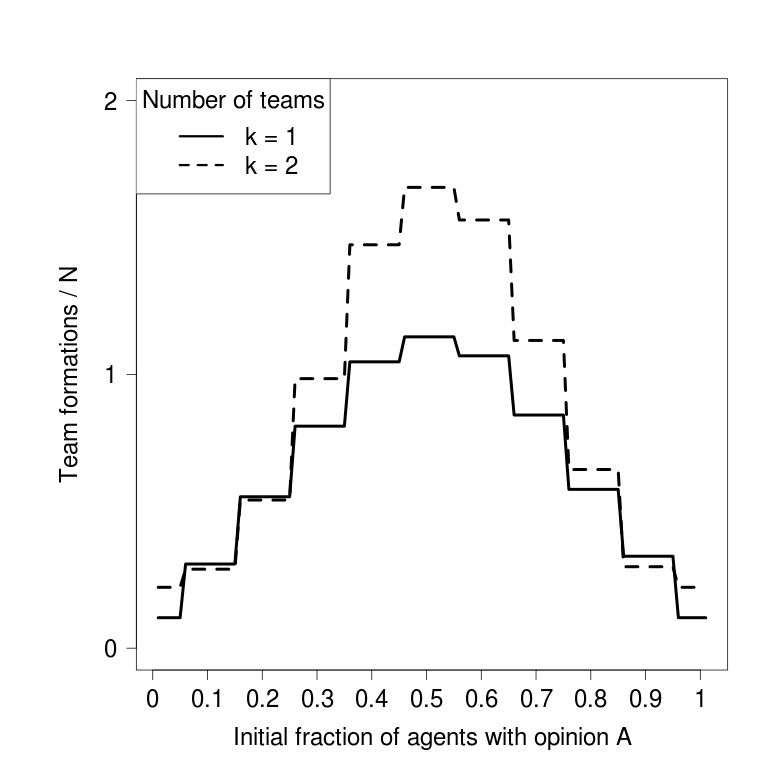
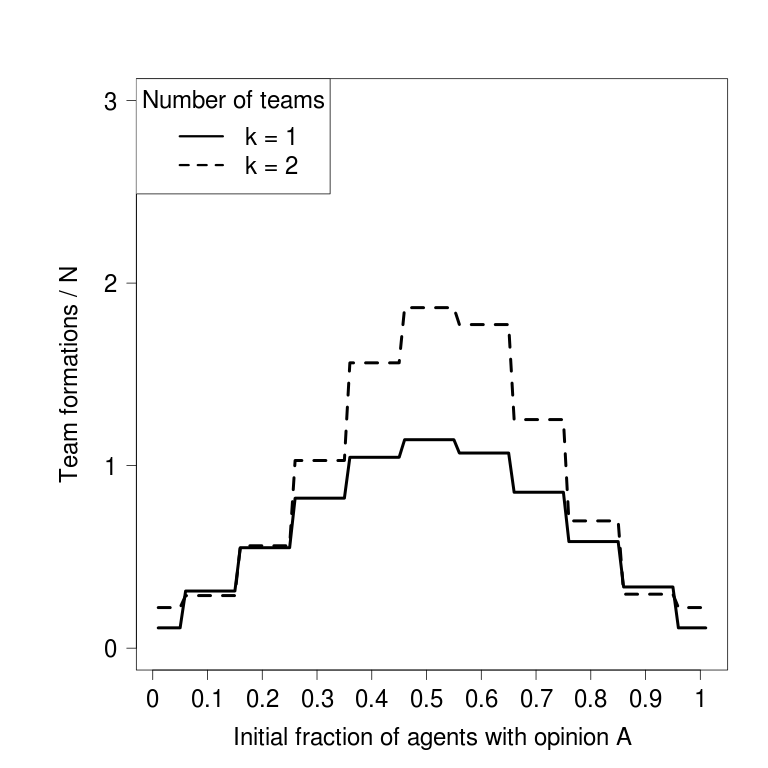
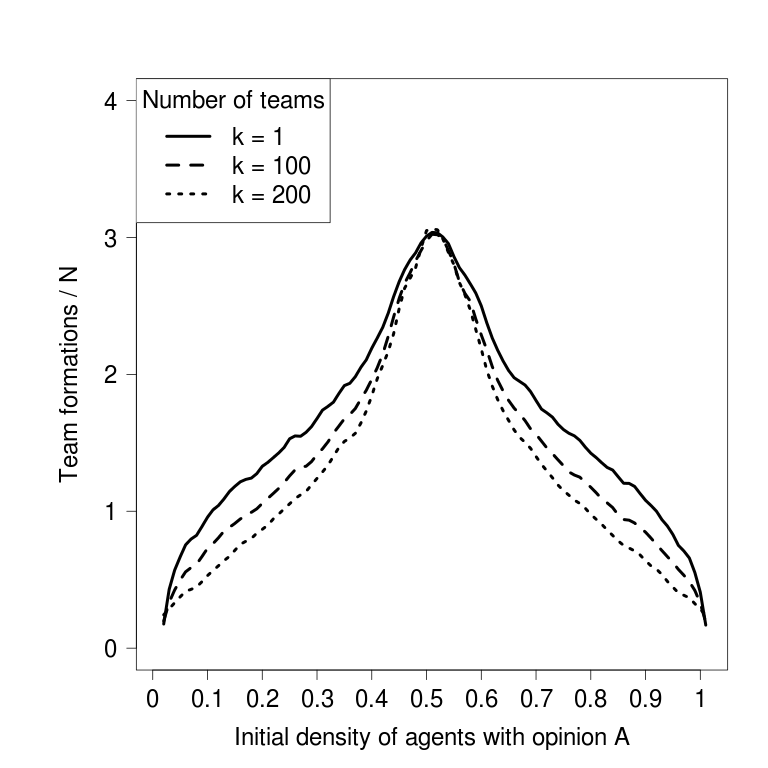
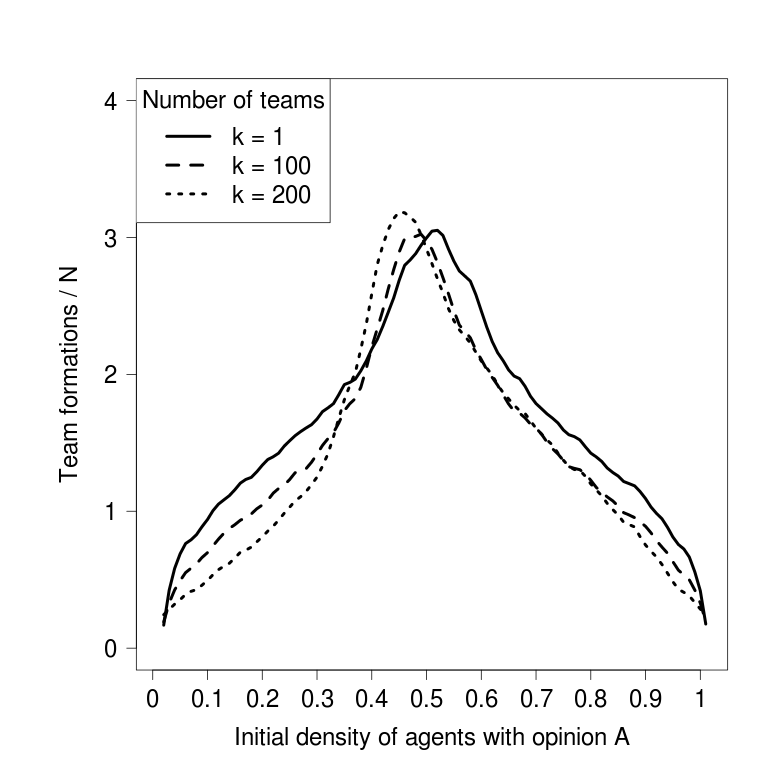
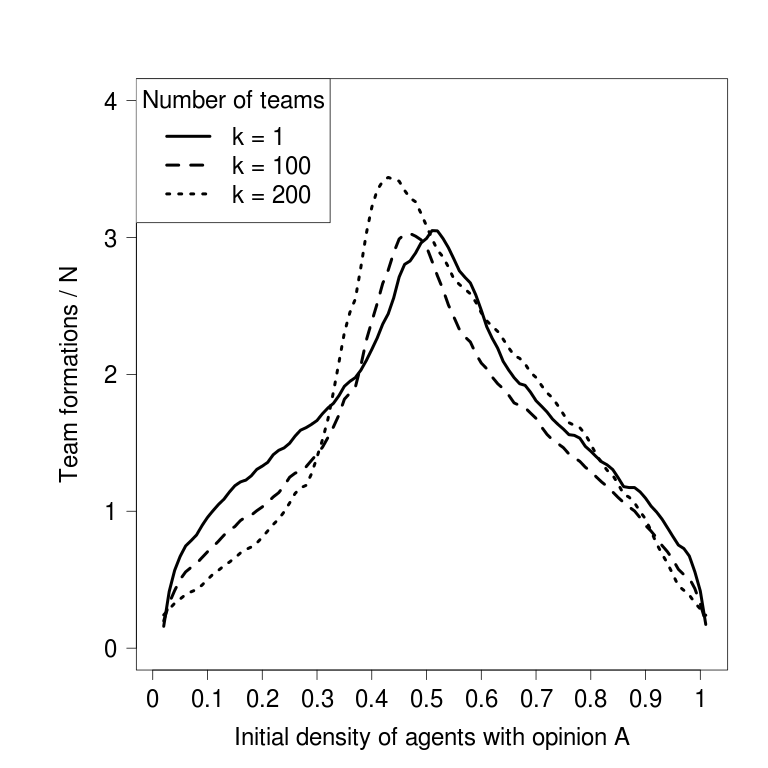
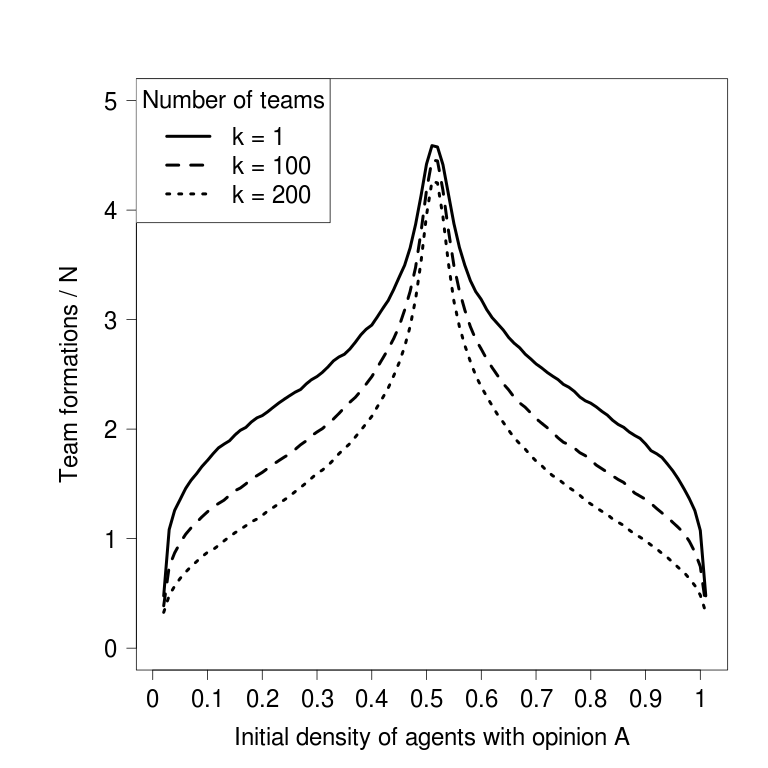
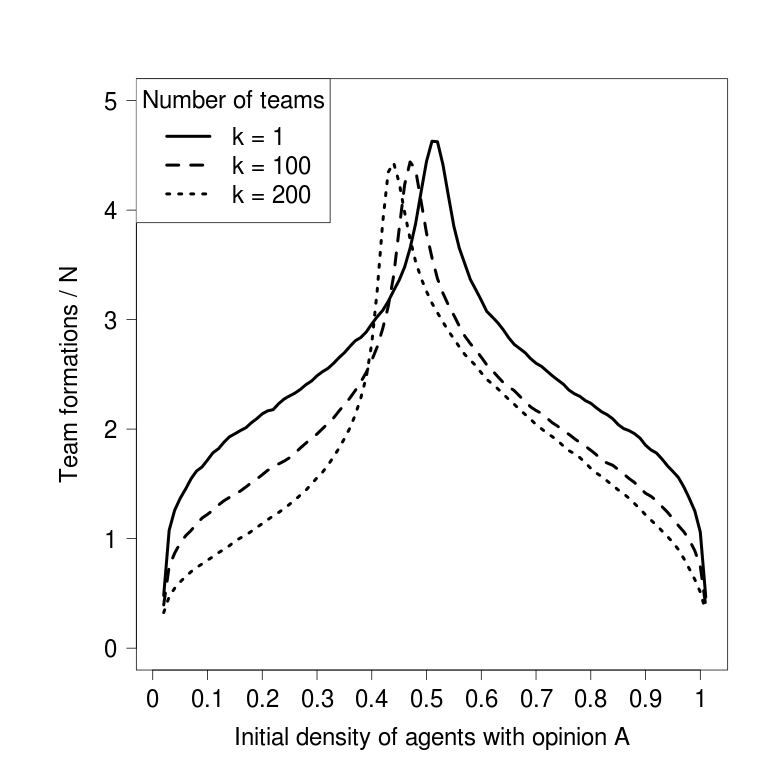
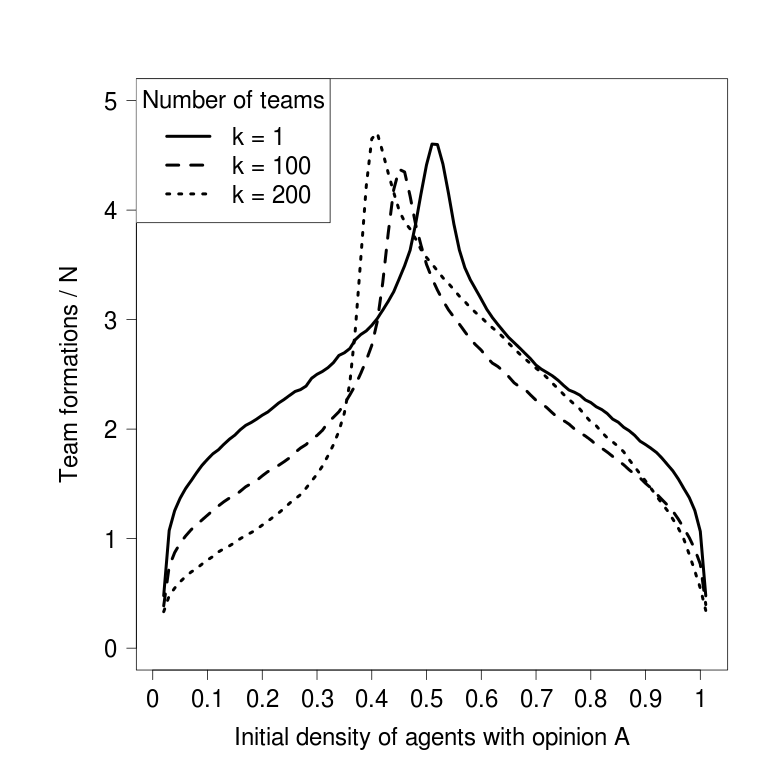
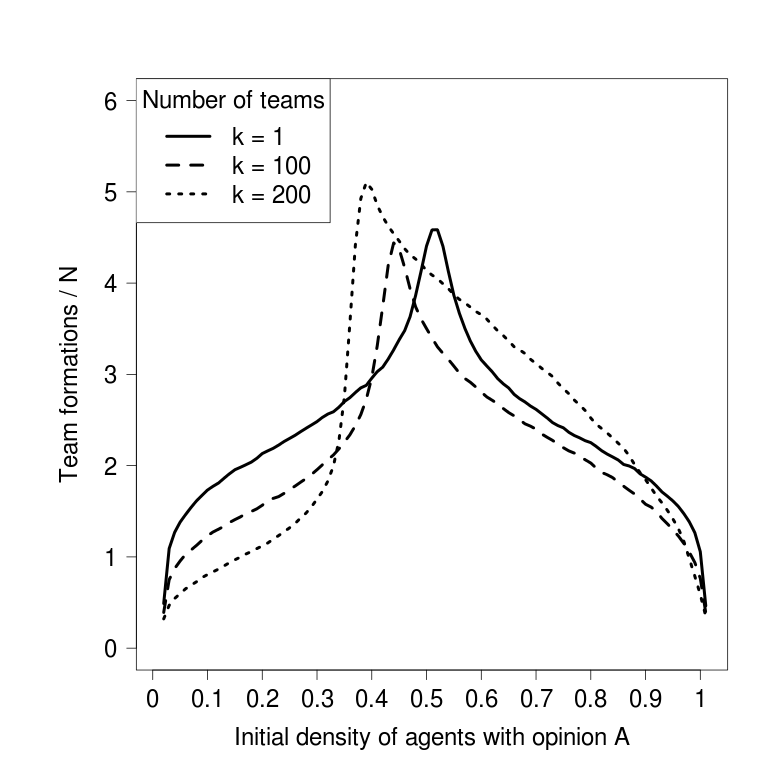
The following figures show the average number of team formations needed to reach consensus as a function of the initial fraction of agents favoring the opinion associated with the shortest latency period.
| 9 agents | ||
|---|---|---|
| 1 Team | 2 Teams | |
 |
 |
|
| 90 agents | ||
| 1 Team | 10 Teams | 20 Teams |
 |
 |
 |
| 900 agents | ||
| 1 Team | 100 Teams | 200 Teams |
 |
 |
 |
| 9 agents | |||
|---|---|---|---|
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
 |
| 90 agents | |||
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
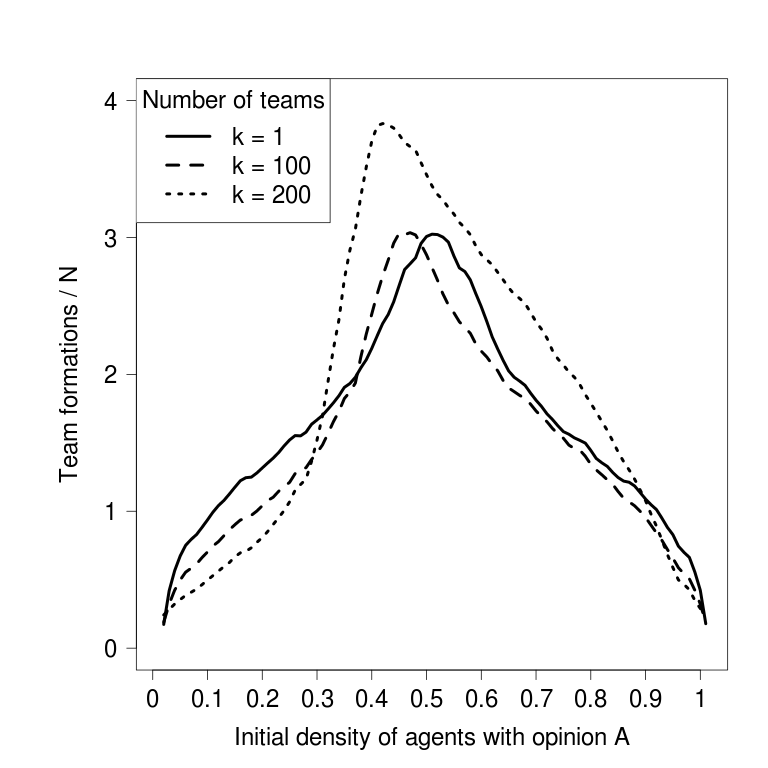 |
| 900 agents | |||
| Latency Ratio = 1 | Latency Ratio = 2 | Latency Ratio = 3 | Latency Ratio = 4 |
 |
 |
 |
 |
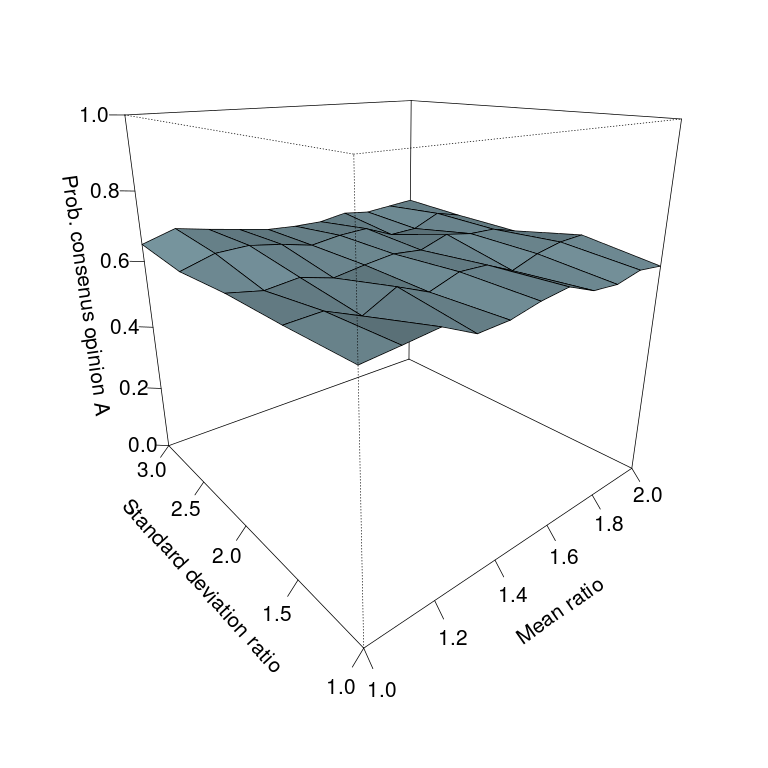
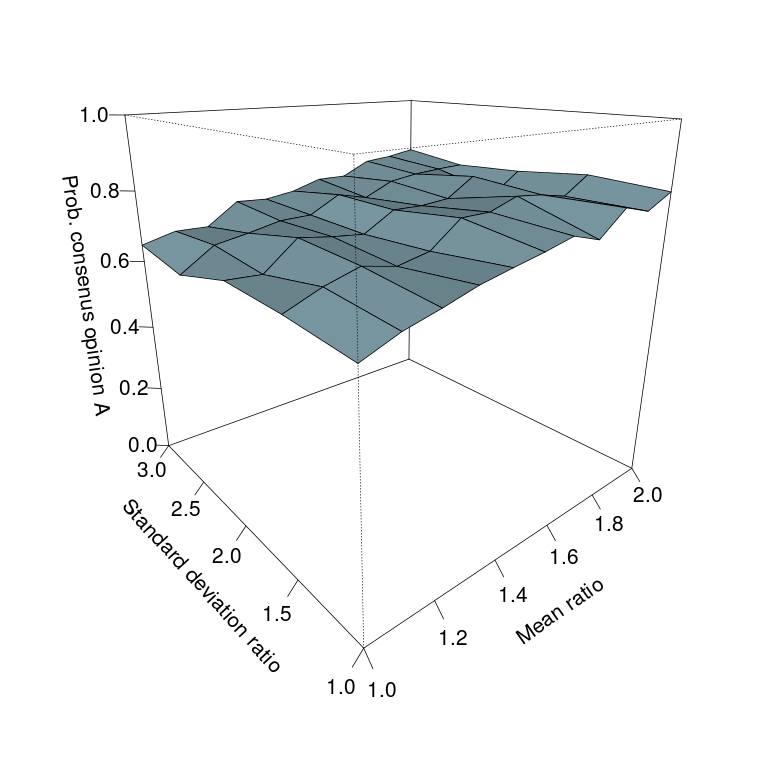
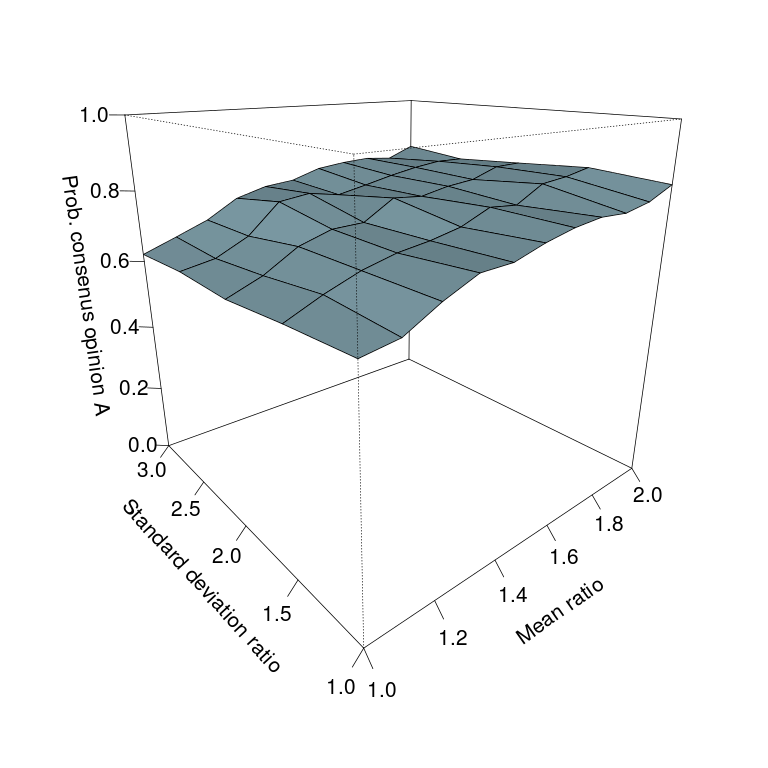
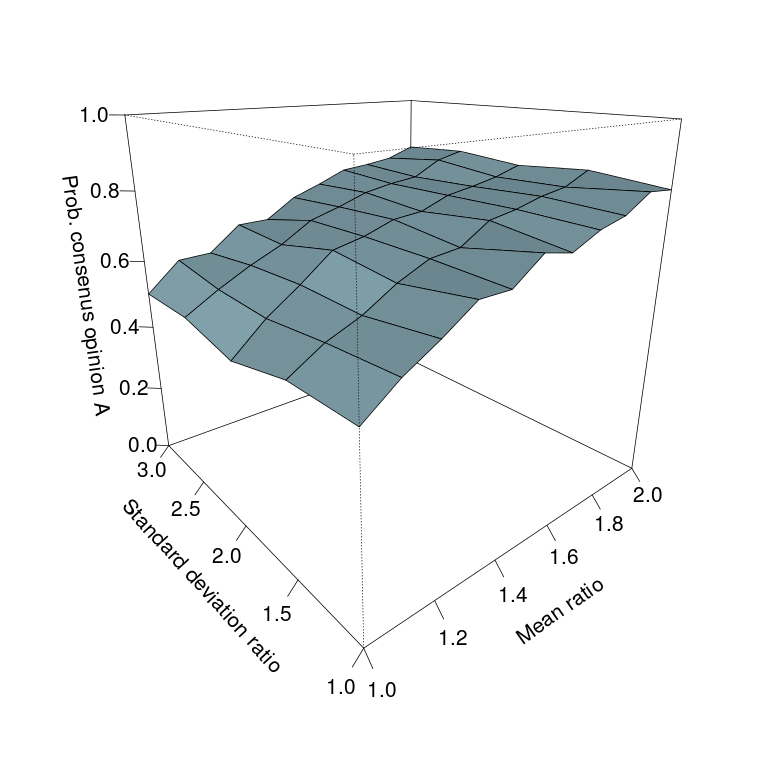
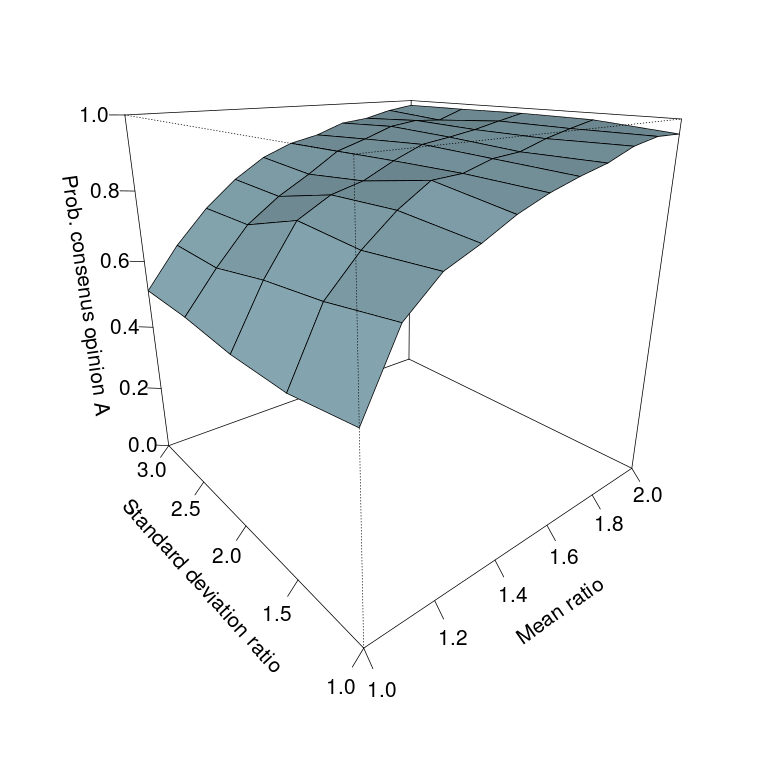
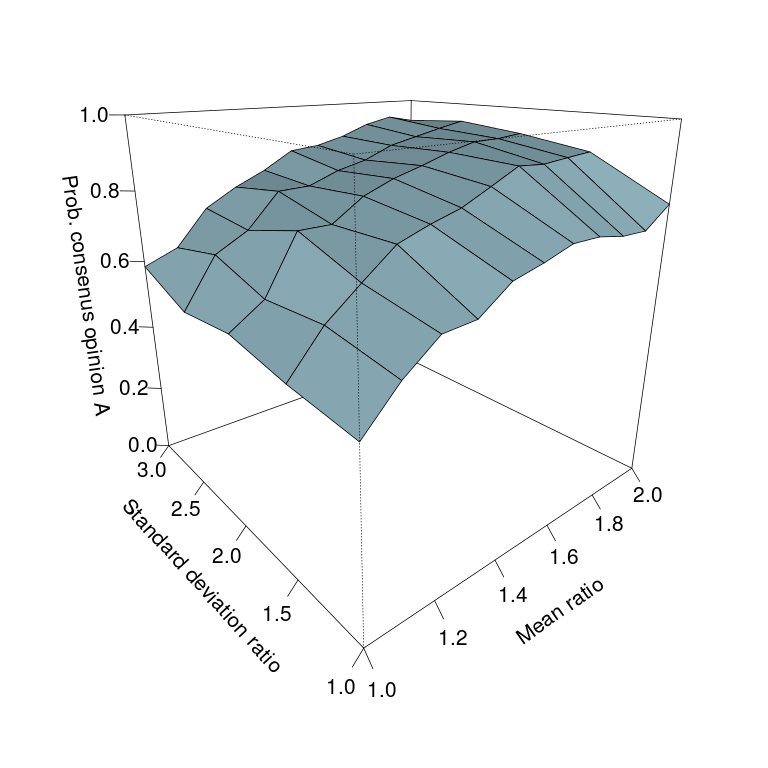
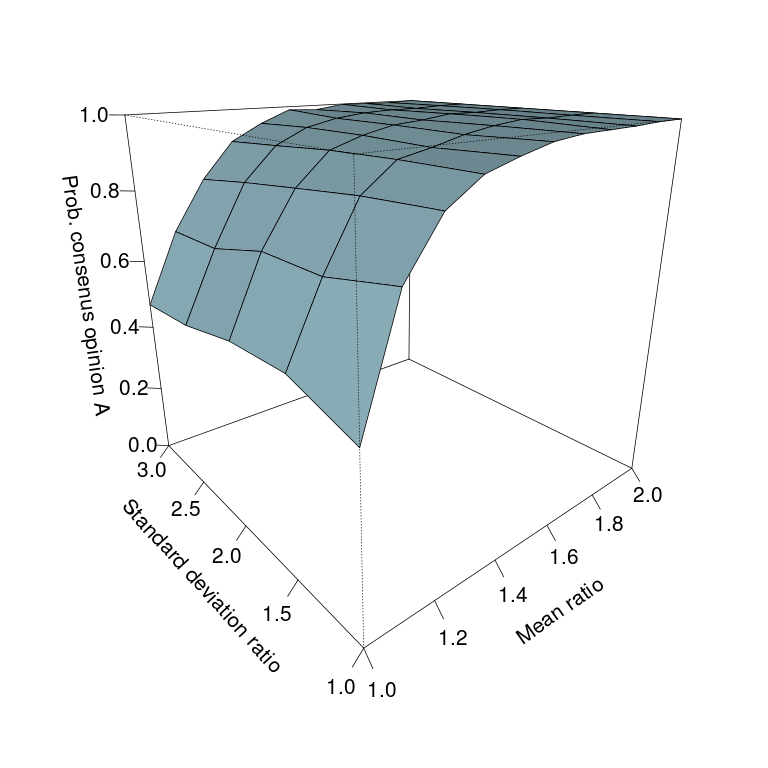
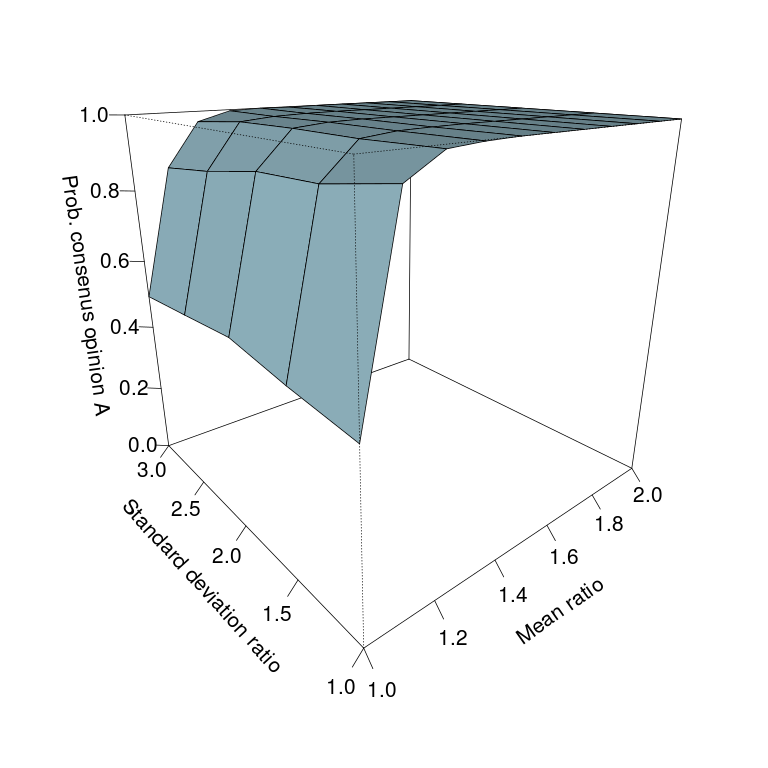
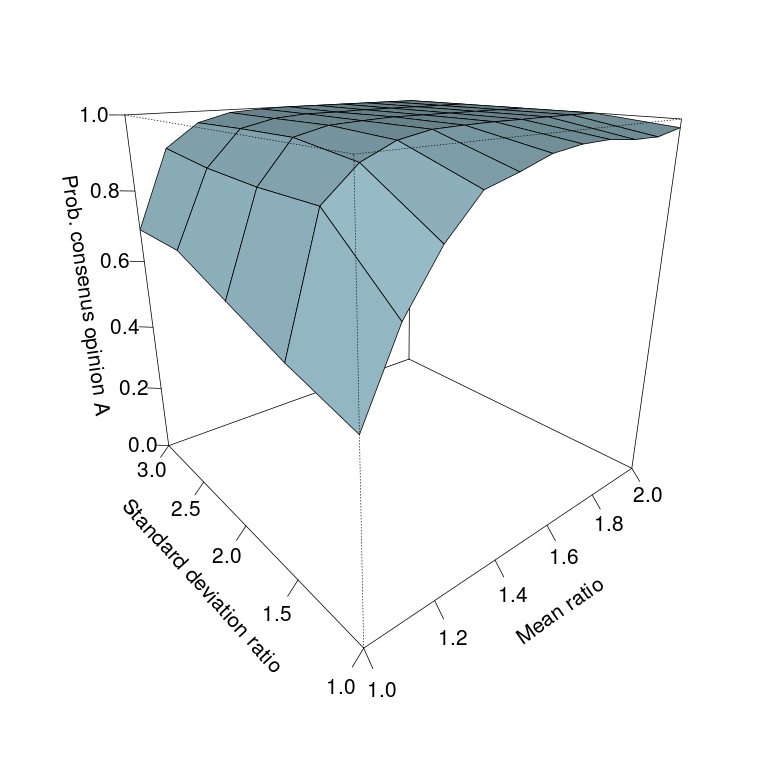
The probability of reaching consensus on the opinion associated with the shortest latency period and the average number of team formations needed to do it as a function of different levels of overlap between latency period duration distributions.
| 11 agents | ||
|---|---|---|
| 1 Team | 2 Teams | 3 Teams |
 |
 |
 |
| 92 agents | ||
| 10 Teams | 20 Teams | 30 Teams |
 |
 |
 |
| 902 agents | ||
| 100 Teams | 200 Teams | 300 Teams |
 |
 |
 |