Opinion Dynamics for Decentralized Decision-Making in a Robot Swarm
by Marco A. Montes de Oca, Eliseo Ferrante, Nithin Mathews, Mauro Birattari, and Marco Dorigo
March 2010
Paper Abstract
In this paper, we study the application of an opinion dynamics model to swarm robotics.
Our main result is that when opinions represent action choices, the opinion associated
with the action that is the fastest to execute spreads in the population. Moreover, the
spread of the best choice happens even when only a minority is initially advocating for
it. The key elements involved in this process are consensus building and positive feedback.
A foraging task that involves collective transport is used to illustrate the potential of
the proposed approach as a decentralized decision-making mechanism for
swarms of robots.
Keywords:Social Choice, Agent-based Simulation and Emergent Behavior, Multiagent Learning.
Shortest Path Selection
download the video
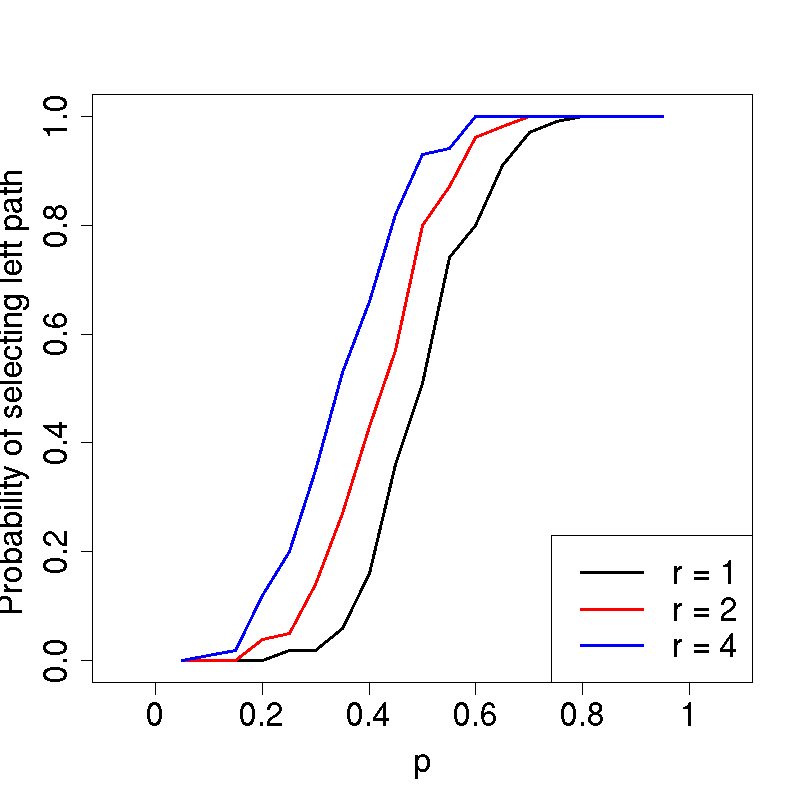
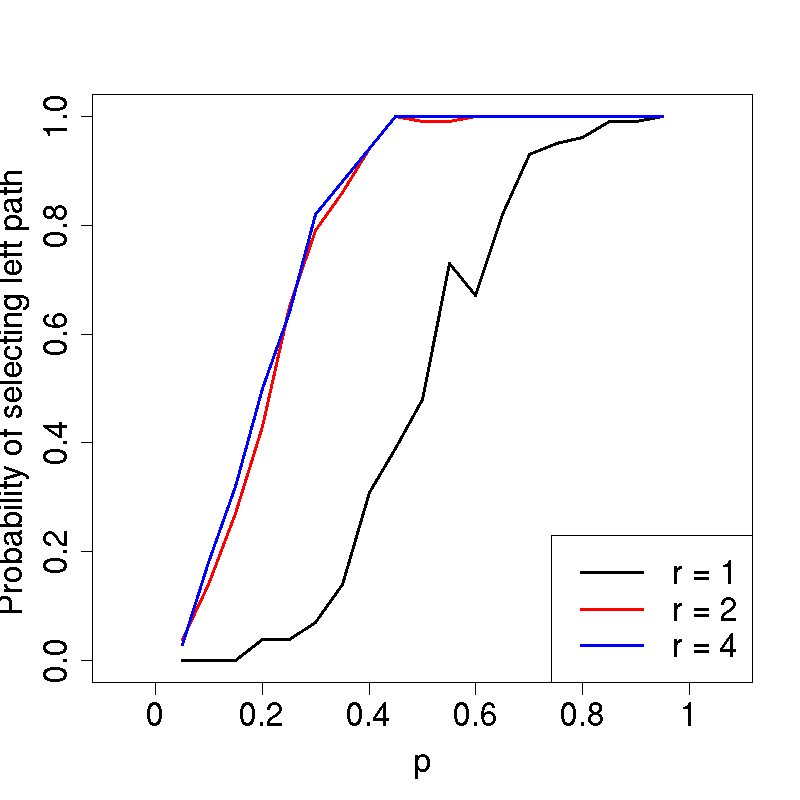
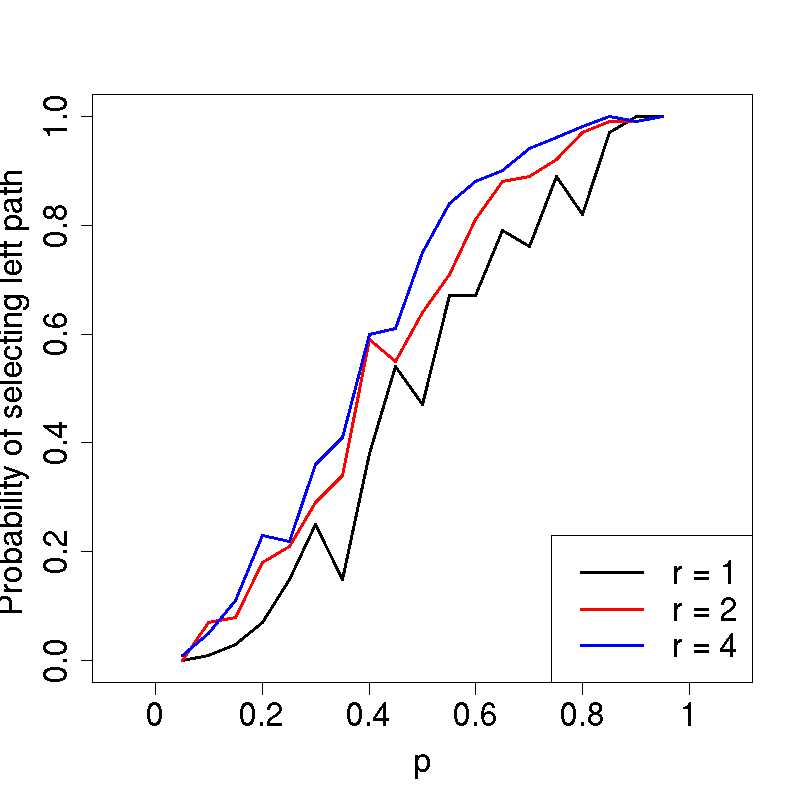
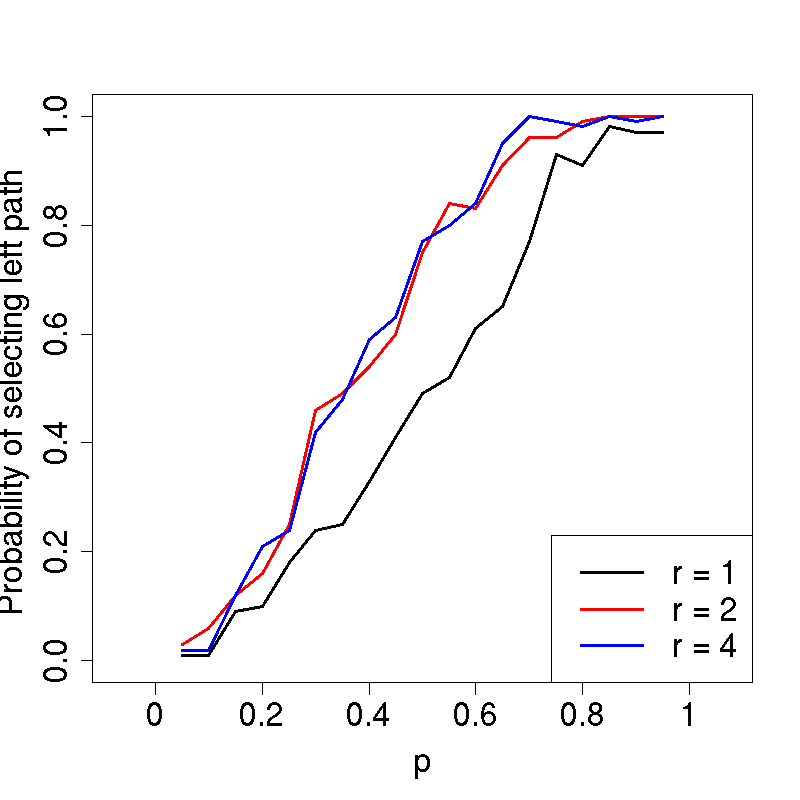
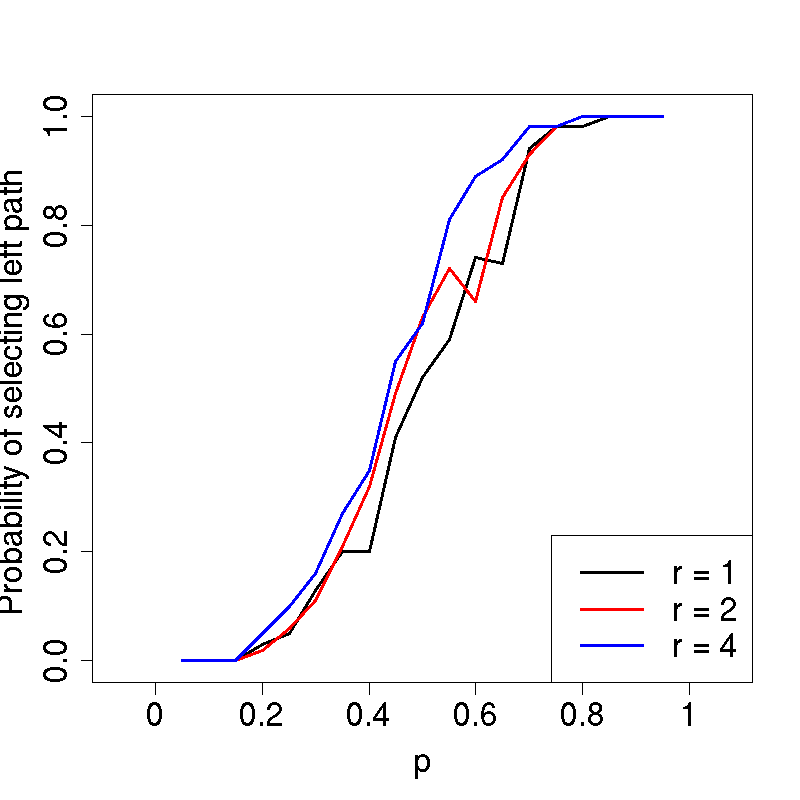
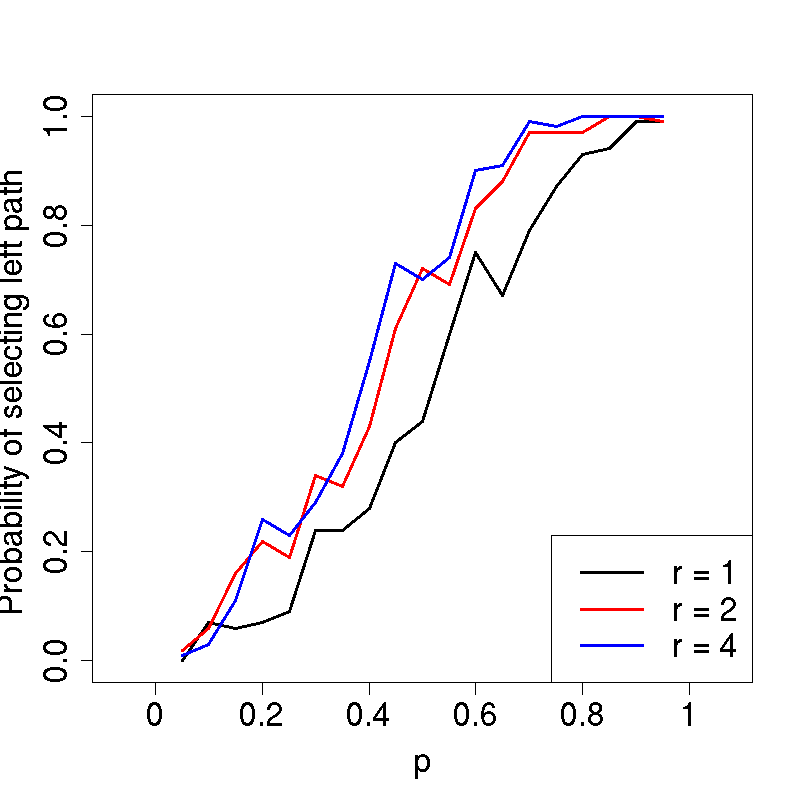
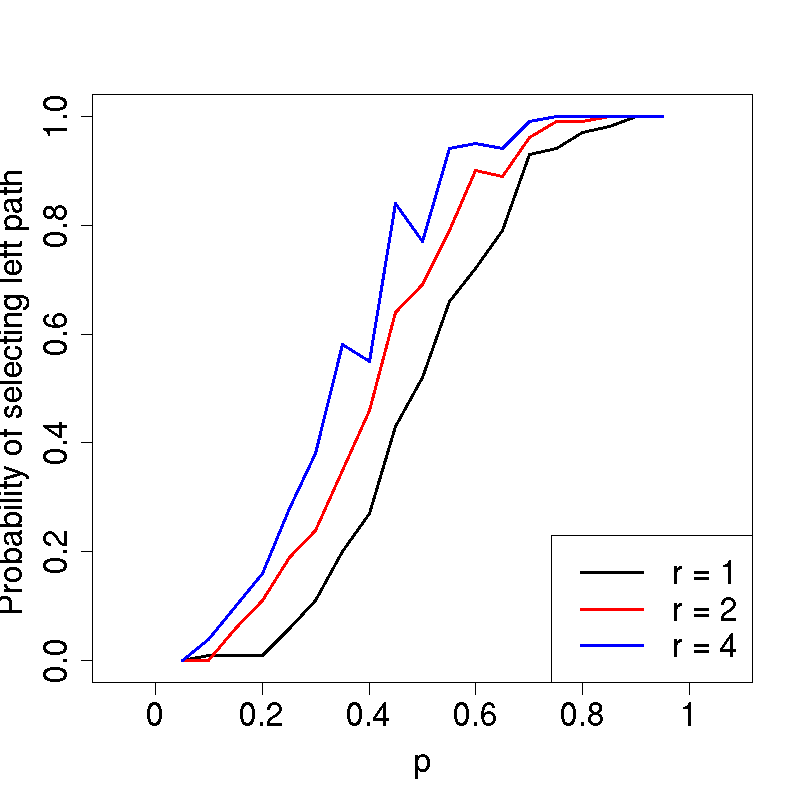
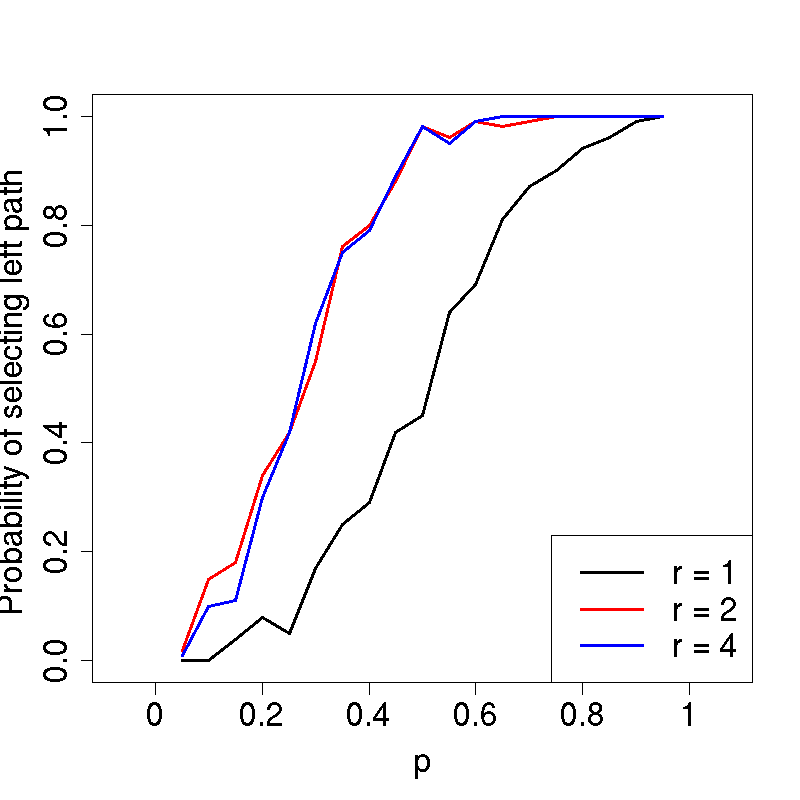
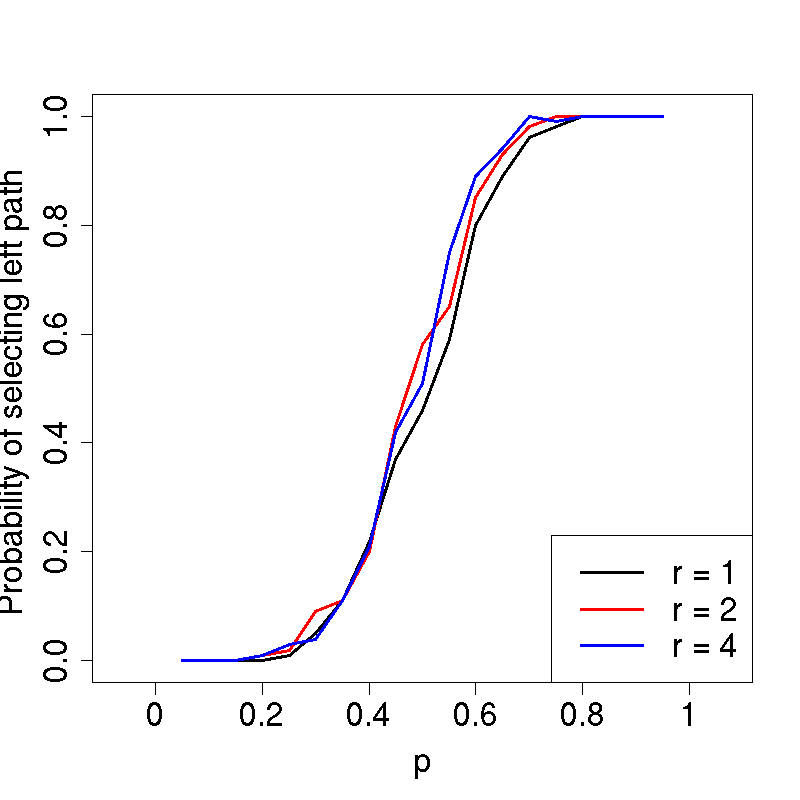
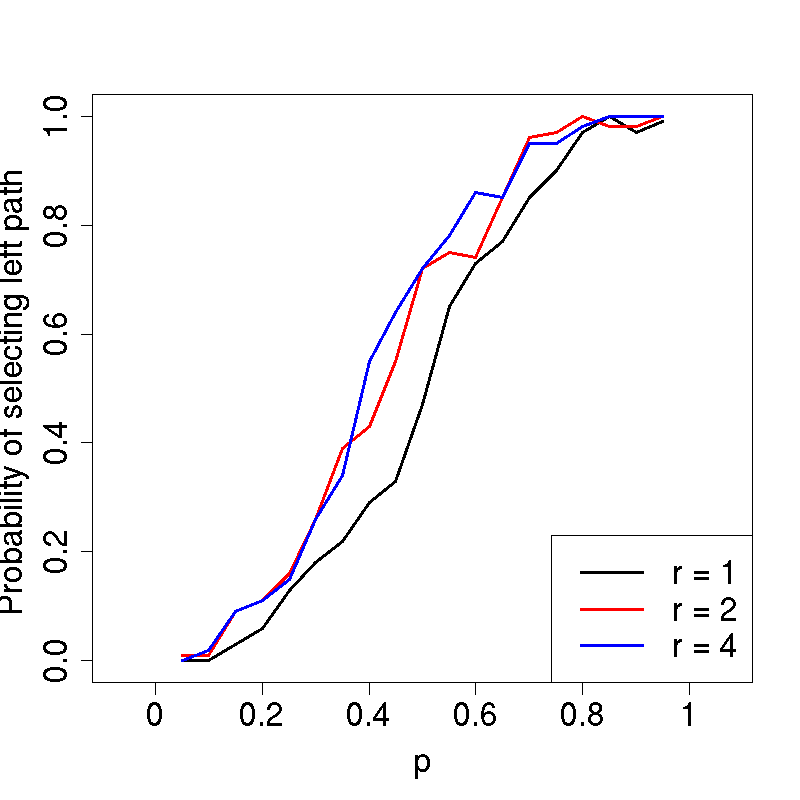
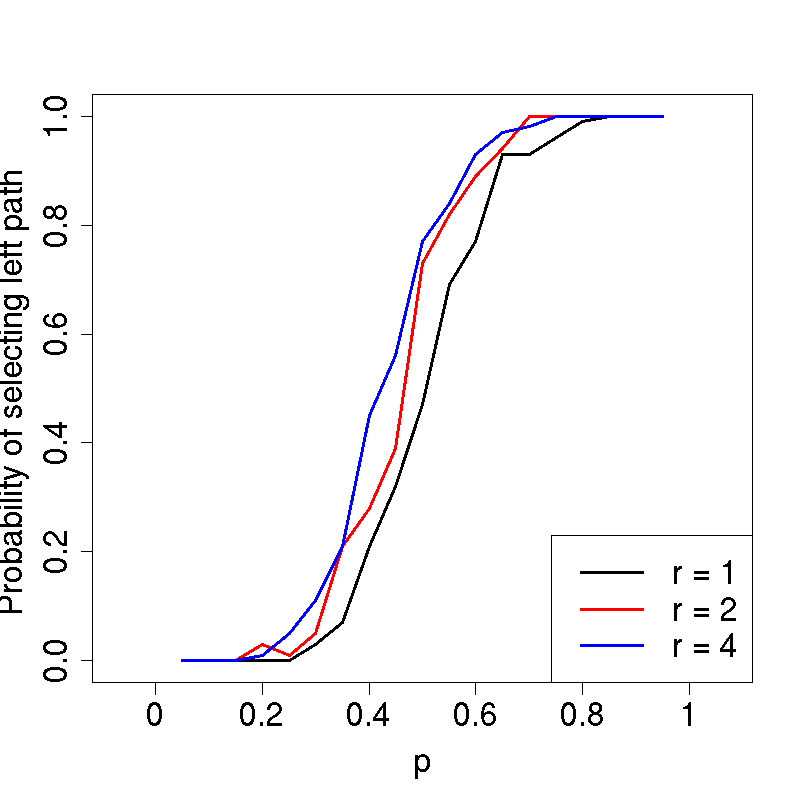
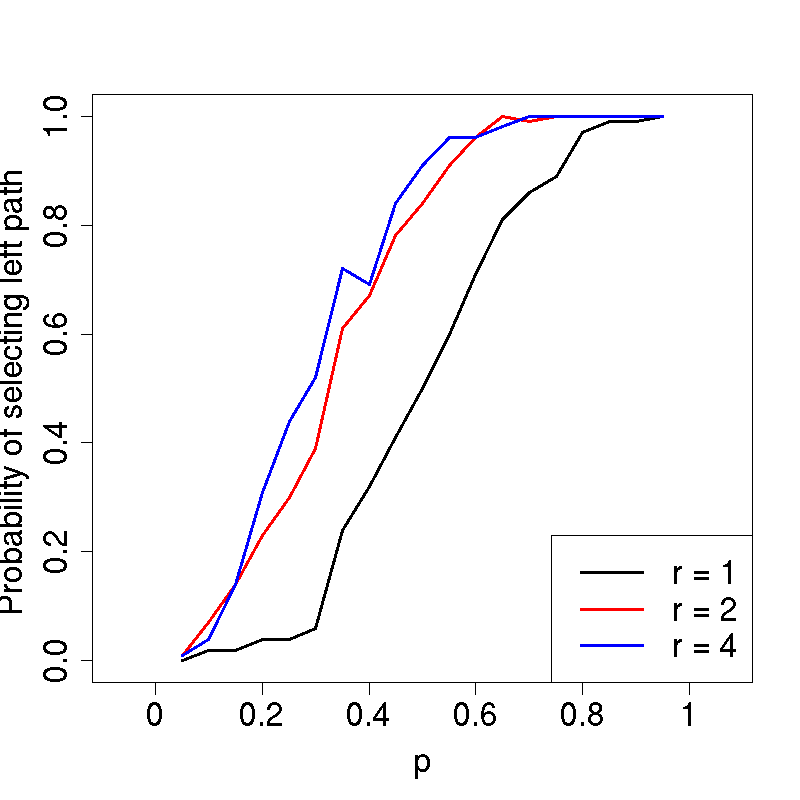
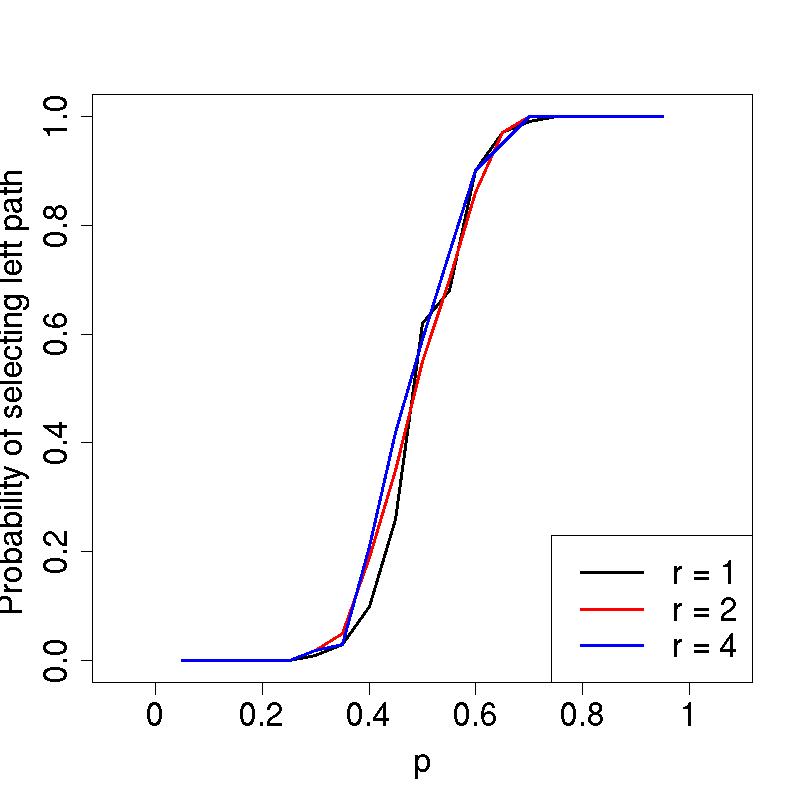
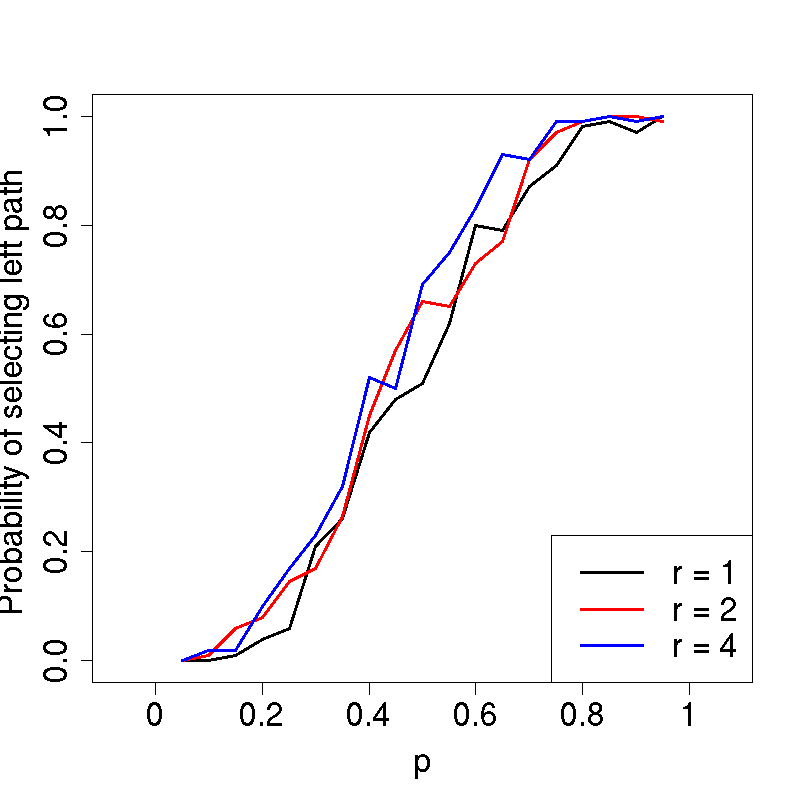
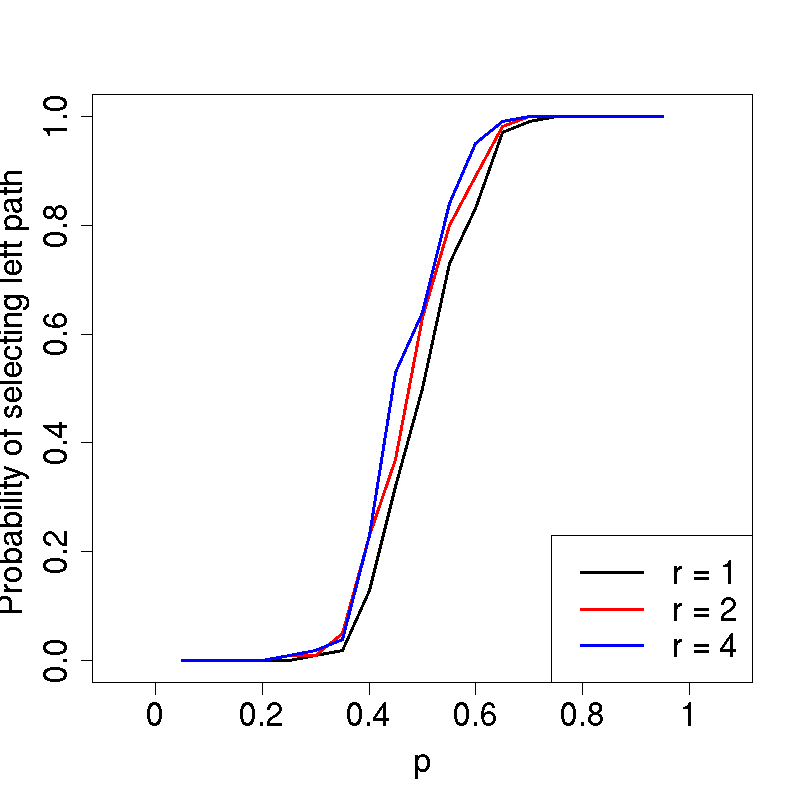
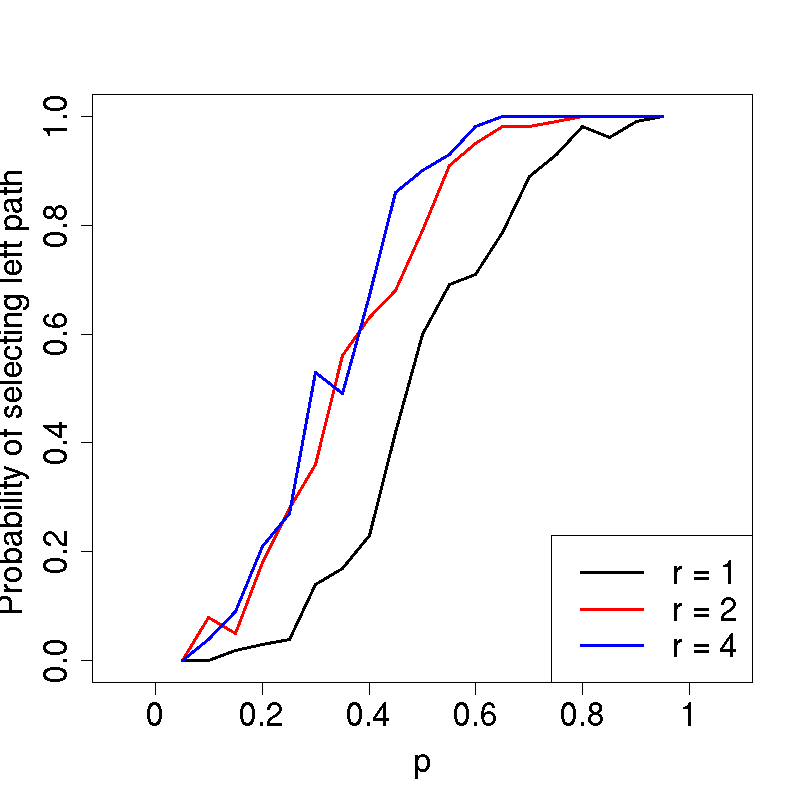
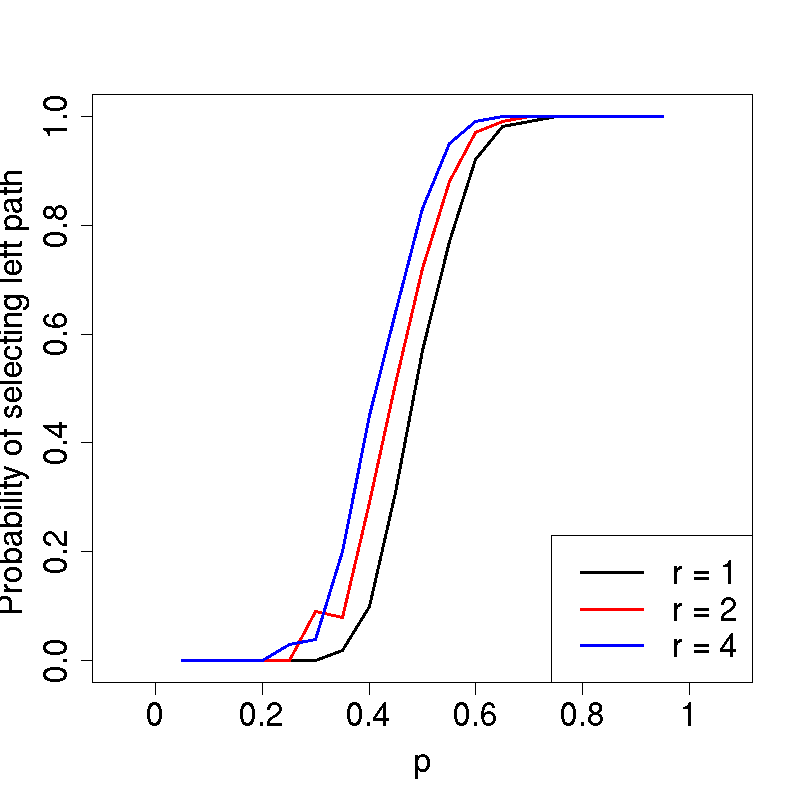
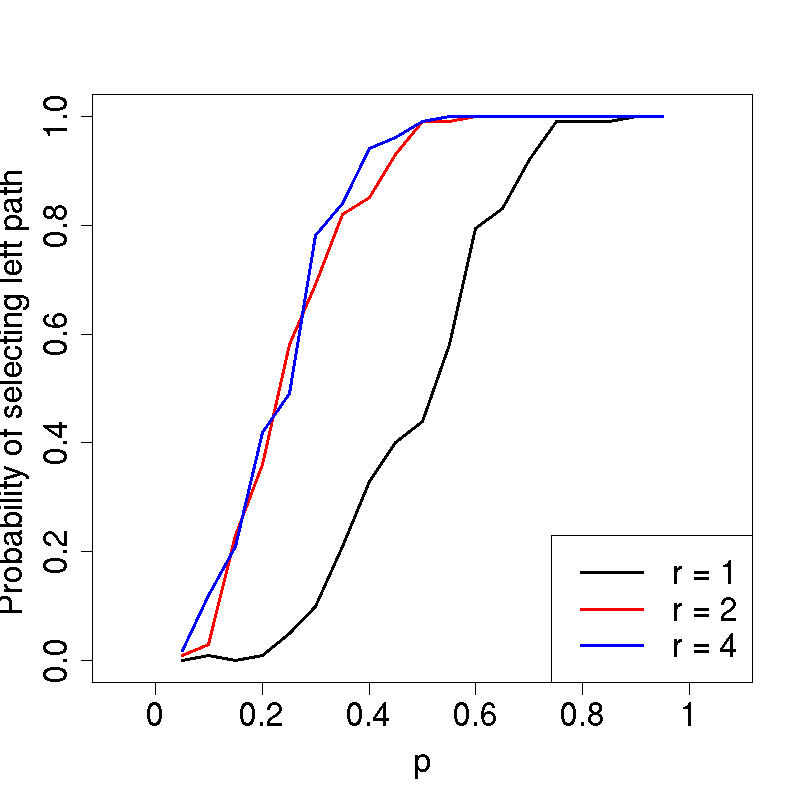
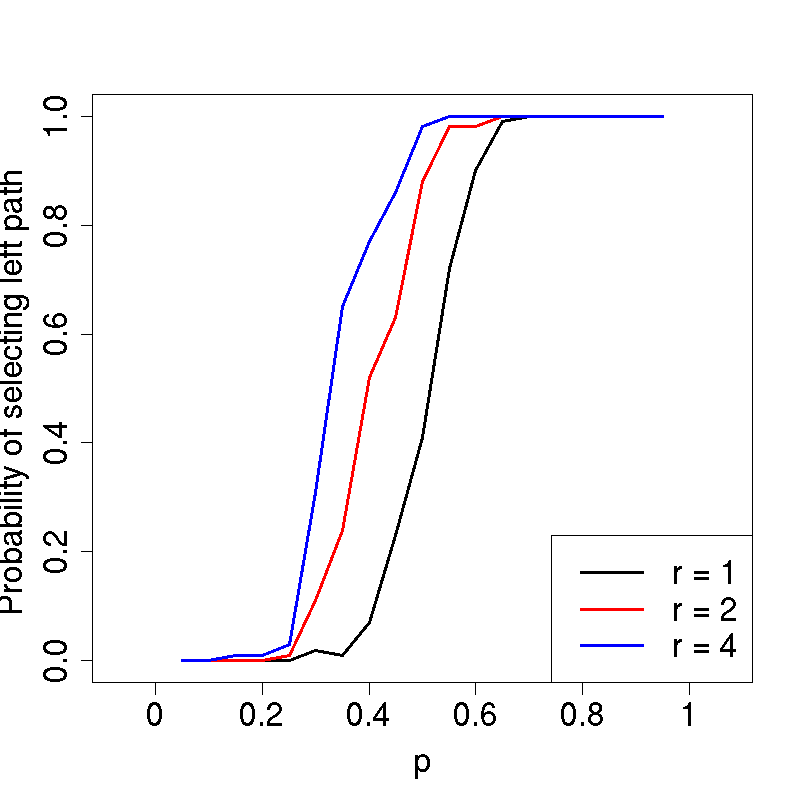
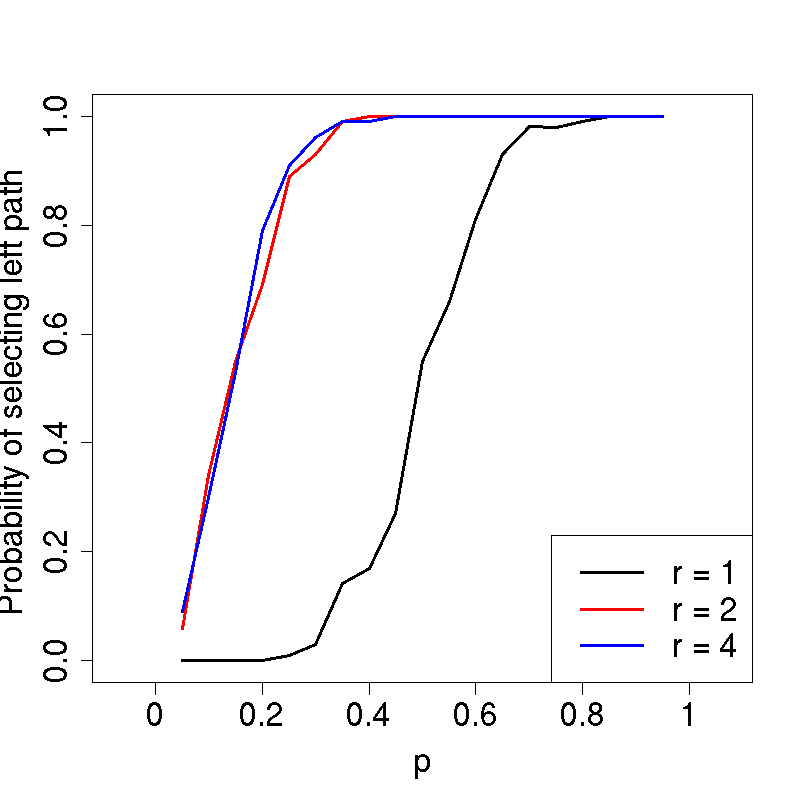
Probability of selecting the fastest-to-execute action
The following figures show the estimated probability of selecting the left path, that is, the fastest-to-execute action, as a function of the initial opinion bias.
Population size = 8 robots
| 8 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
Population size = 16 robots
| 16 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 16 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
Population size = 32 robots
| 32 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 32 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 32 Robots - 8 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
|
|
Population size = 64 robots
| 64 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 64 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 64 Robots - 8 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 64 Robots - 16 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
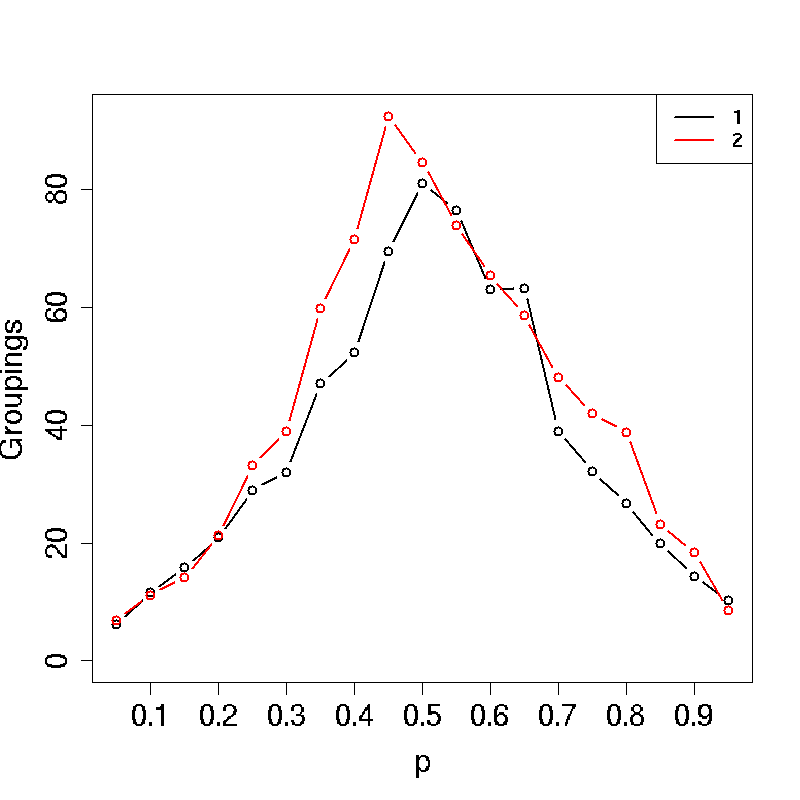
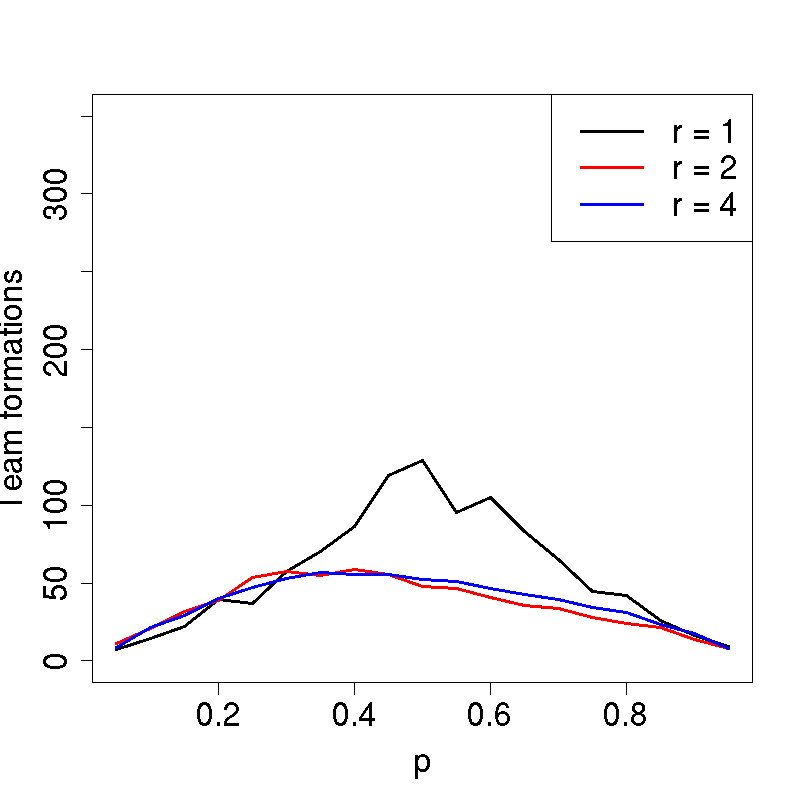
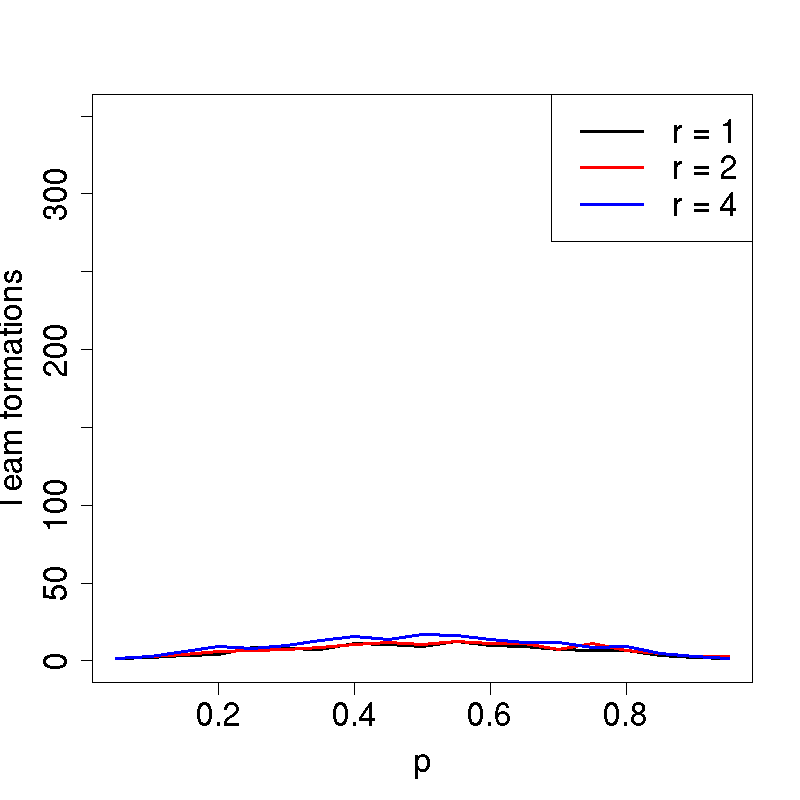
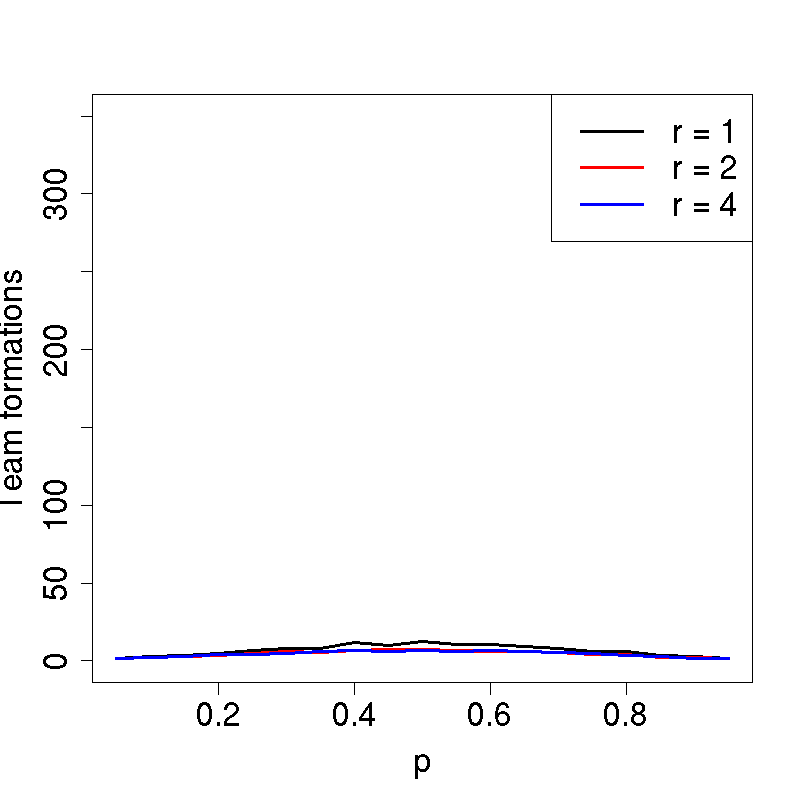
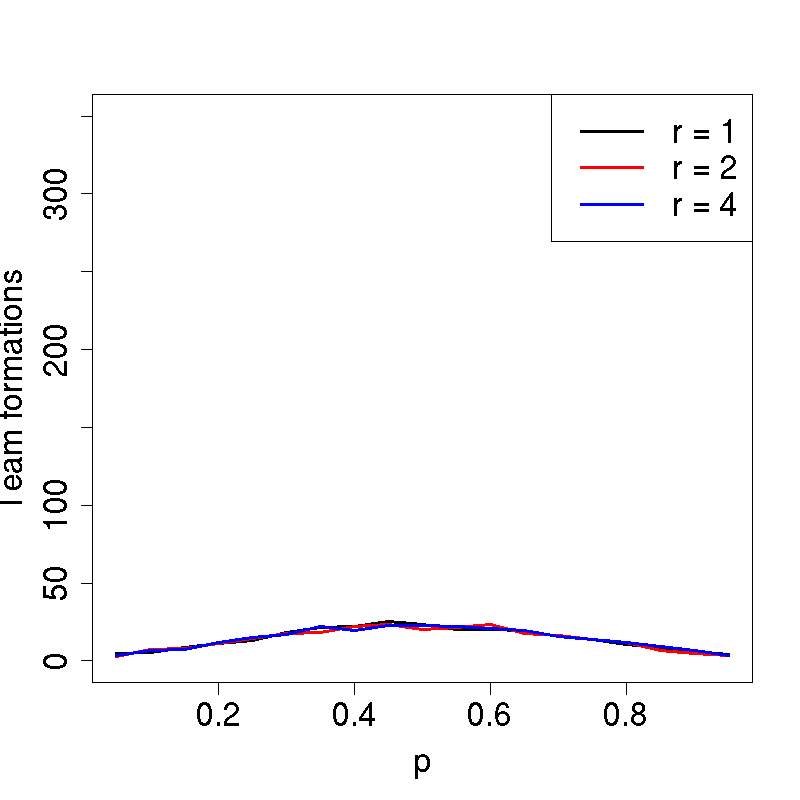
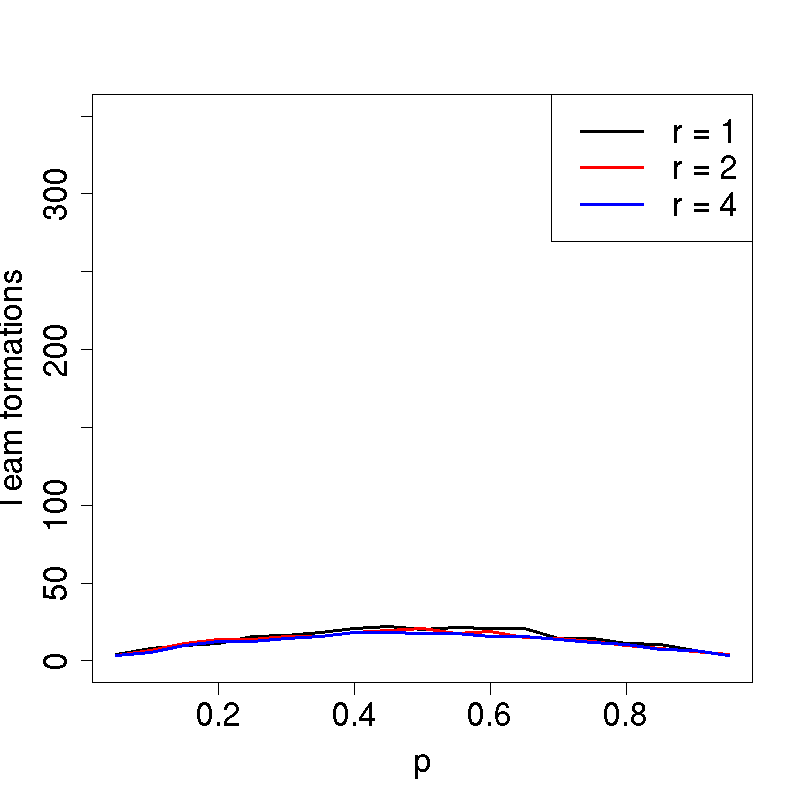
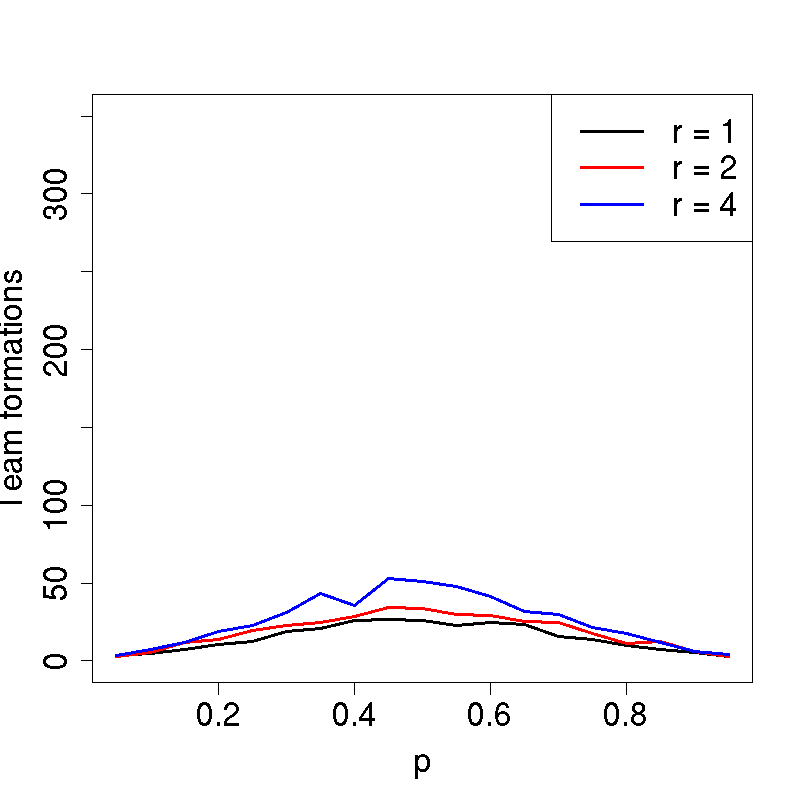
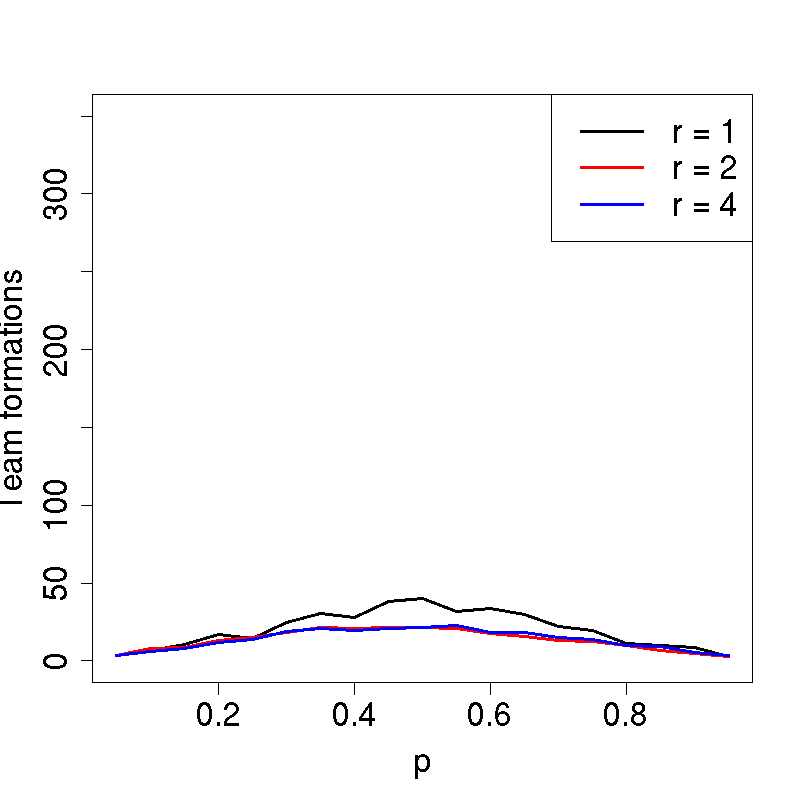
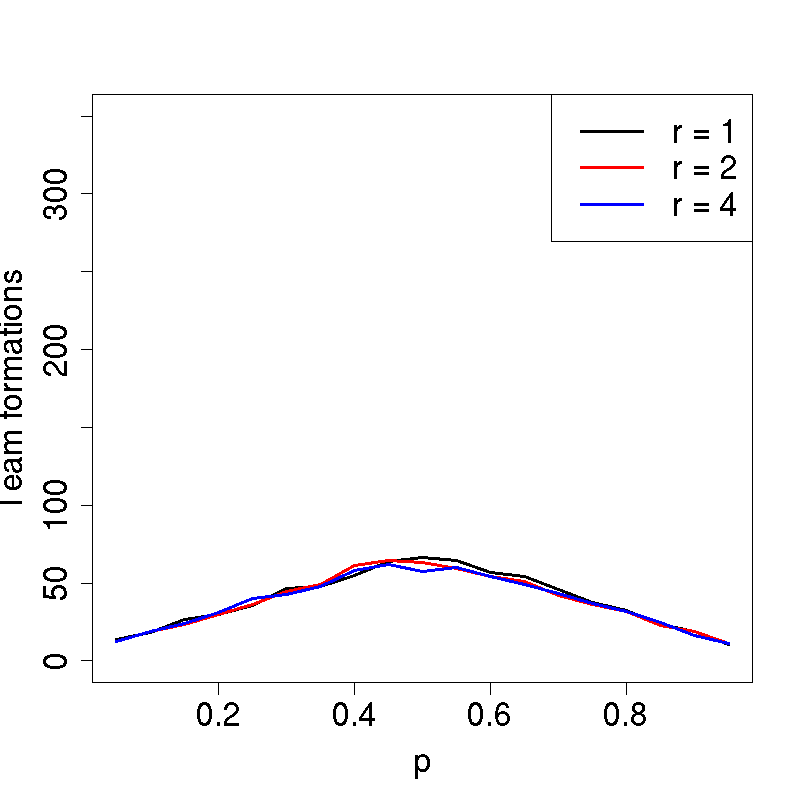
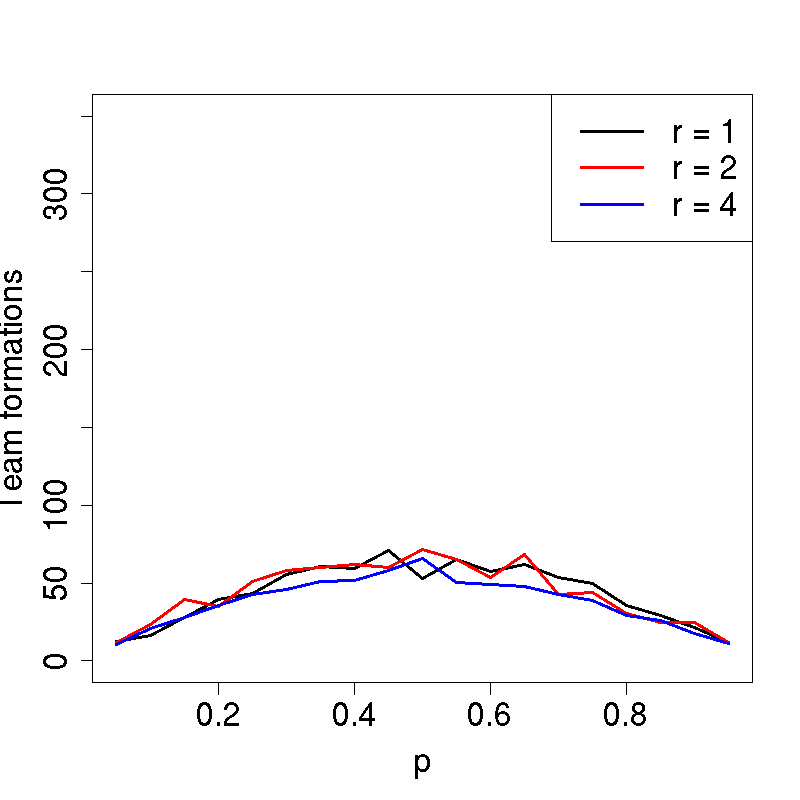
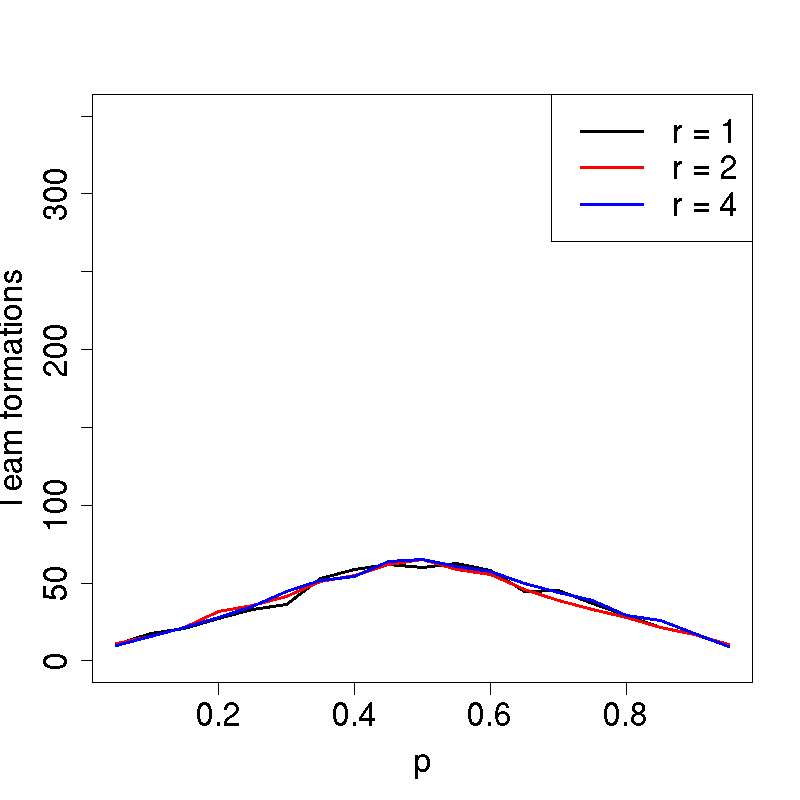
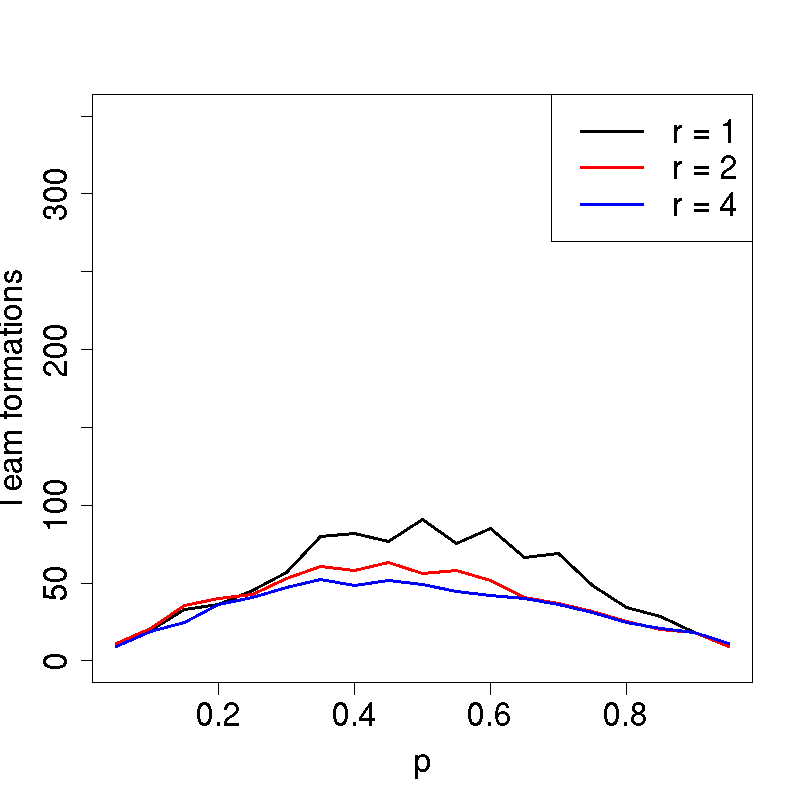
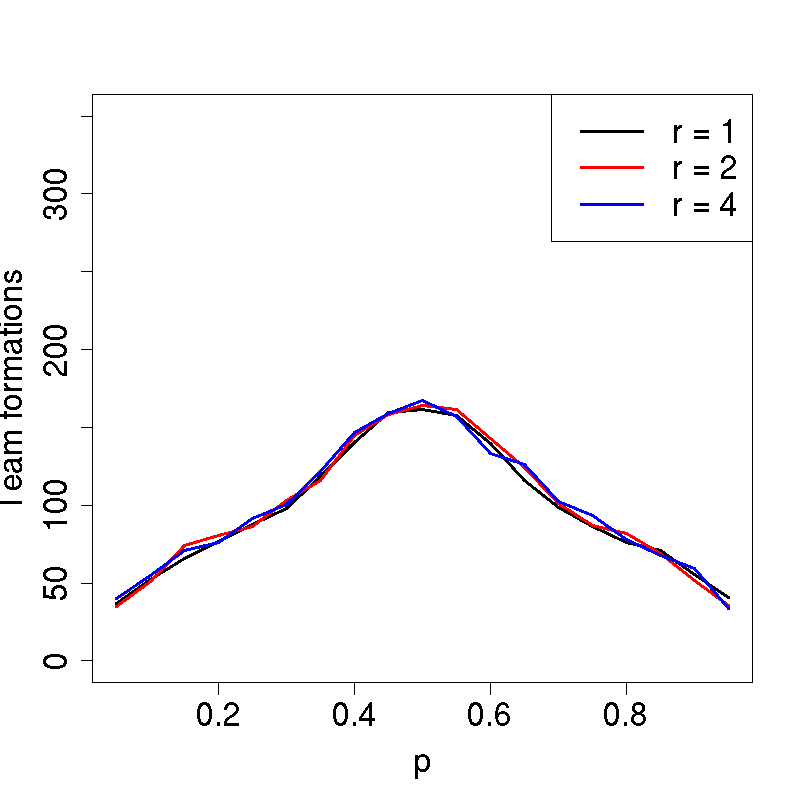
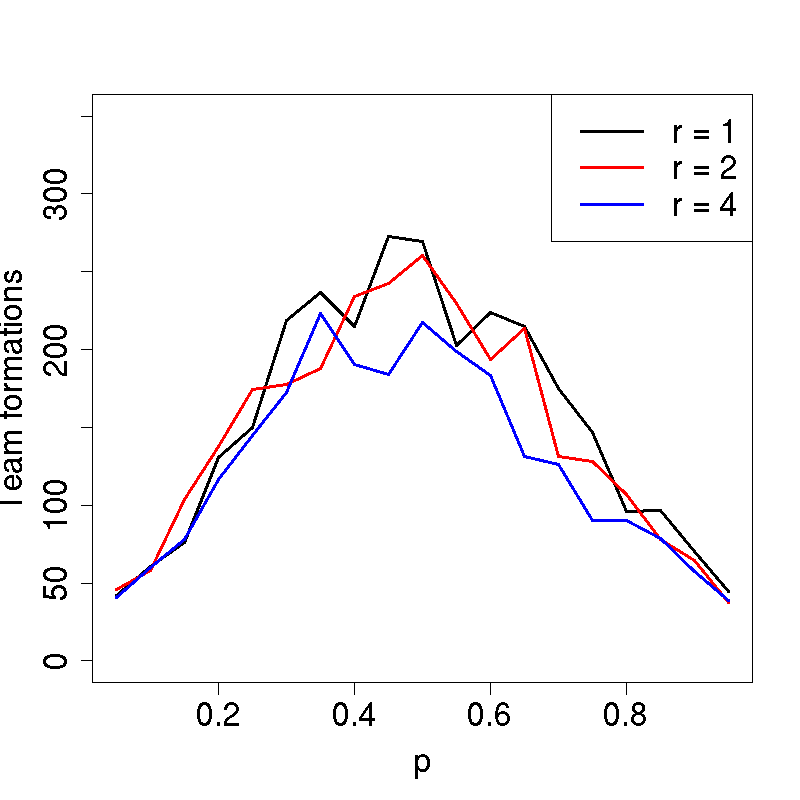
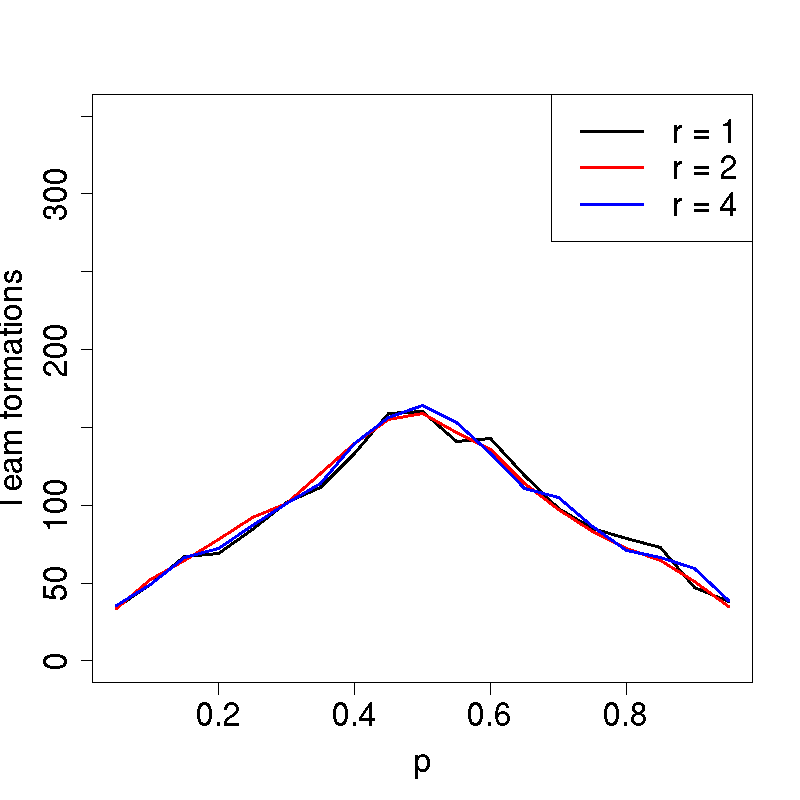
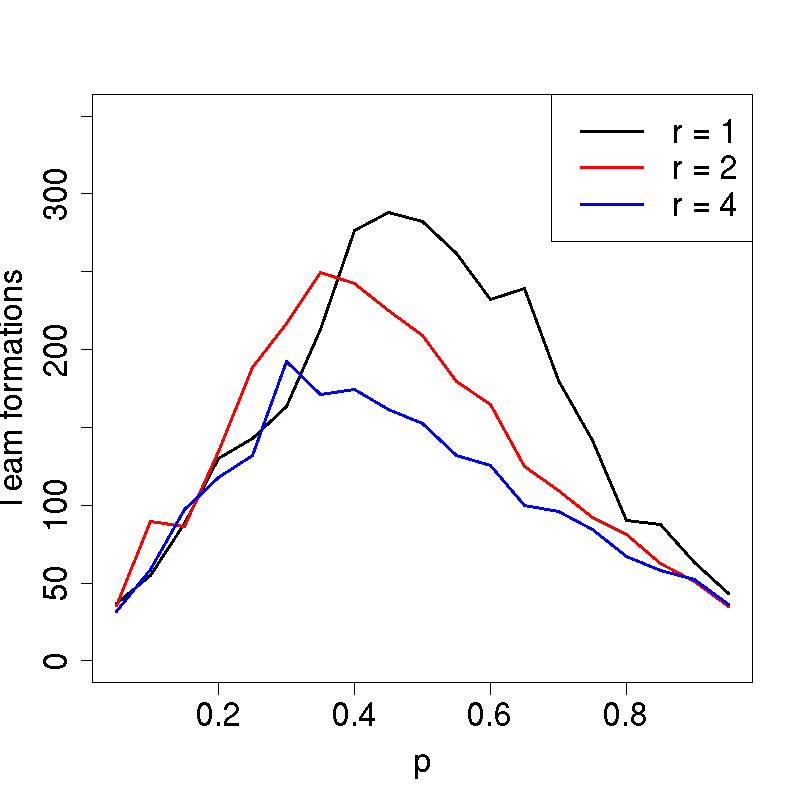
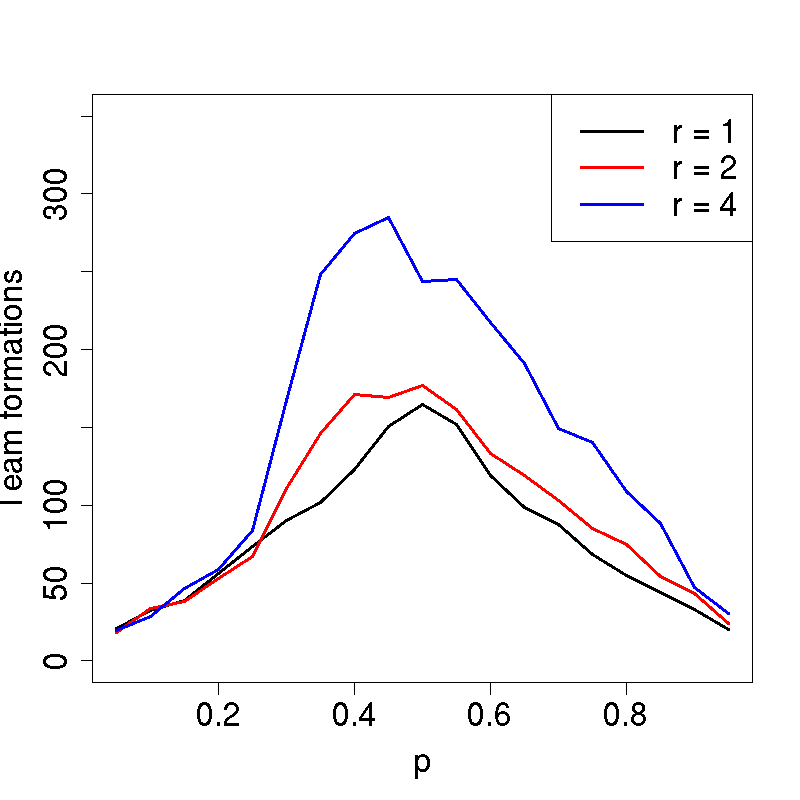
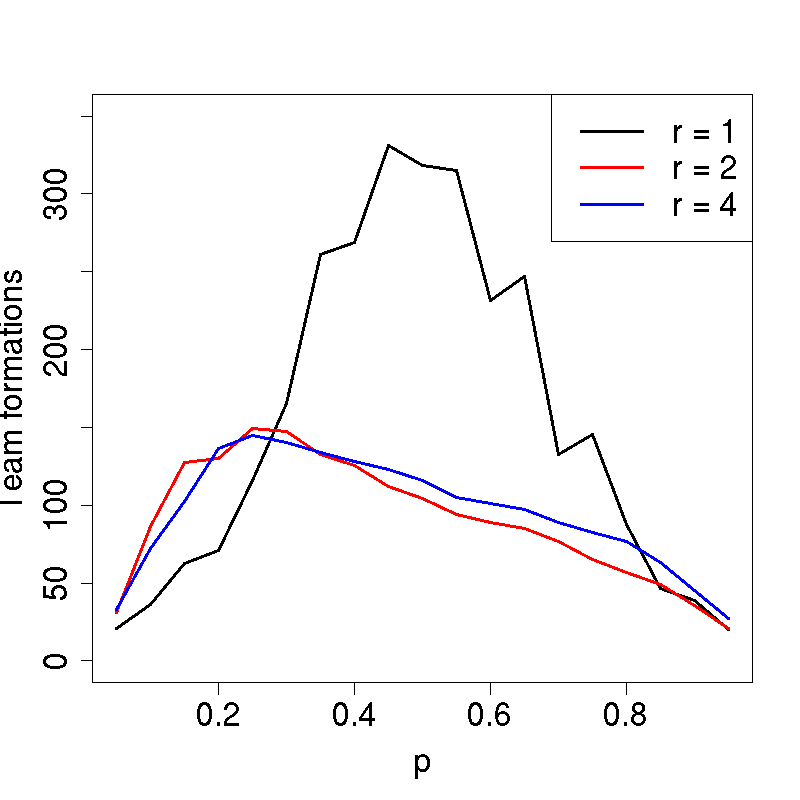
Number of team formations needed to reach consensus as a function of the intial opinion bias
The following figures show number of team formations needed to reach consensus as a function of the initial opinion bias.
Population size = 8 robots
| 8 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
Population size = 16 robots
| 16 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 16 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
Population size = 32 robots
| 32 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 32 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 32 Robots - 8 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
|
|
Population size = 64 robots
| 64 Robots - 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 64 Robots - 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
| 64 Robots - 16 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
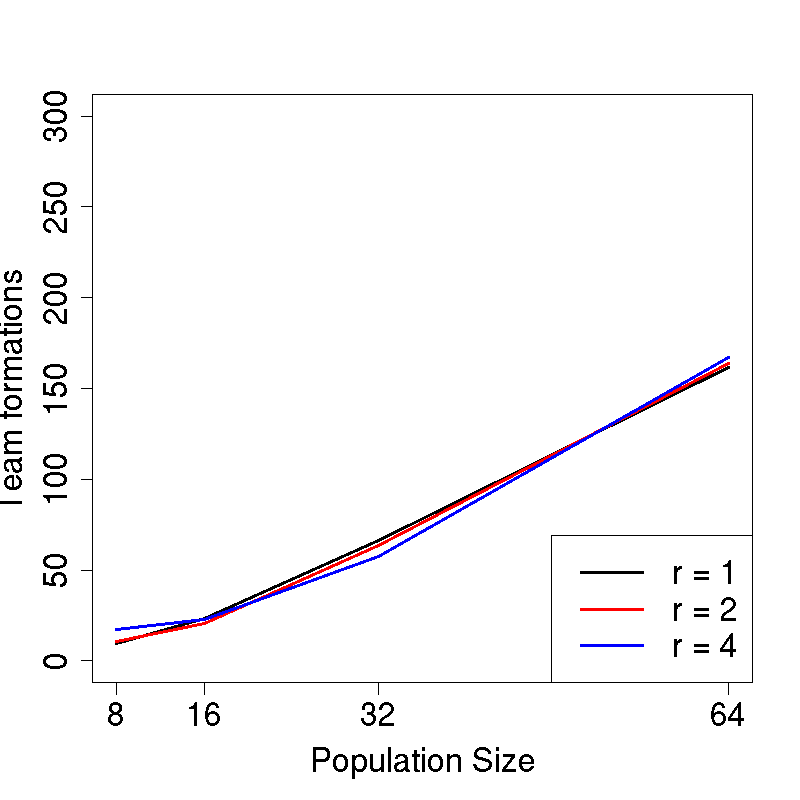
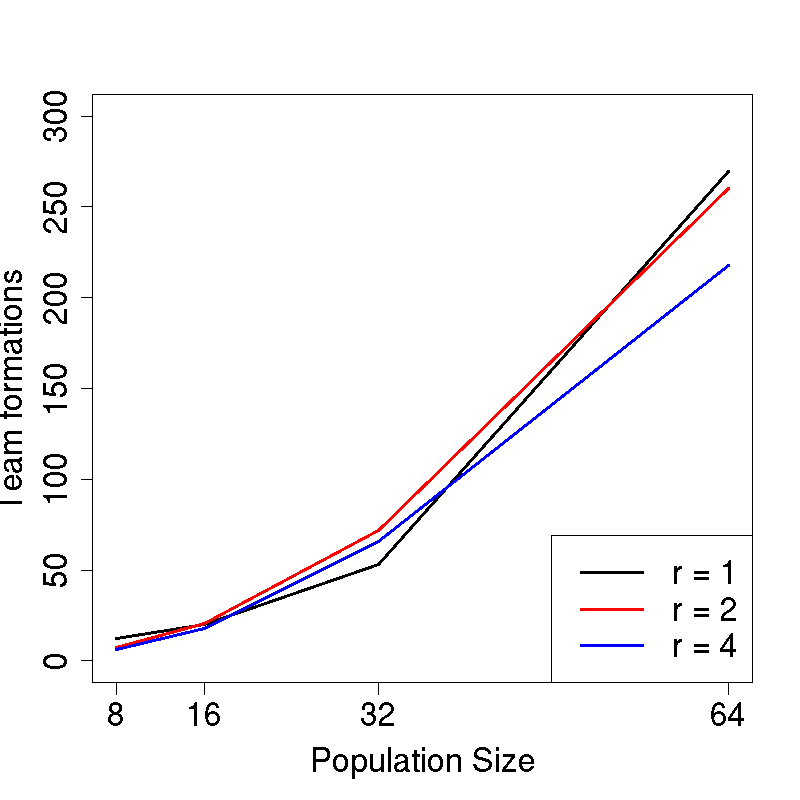
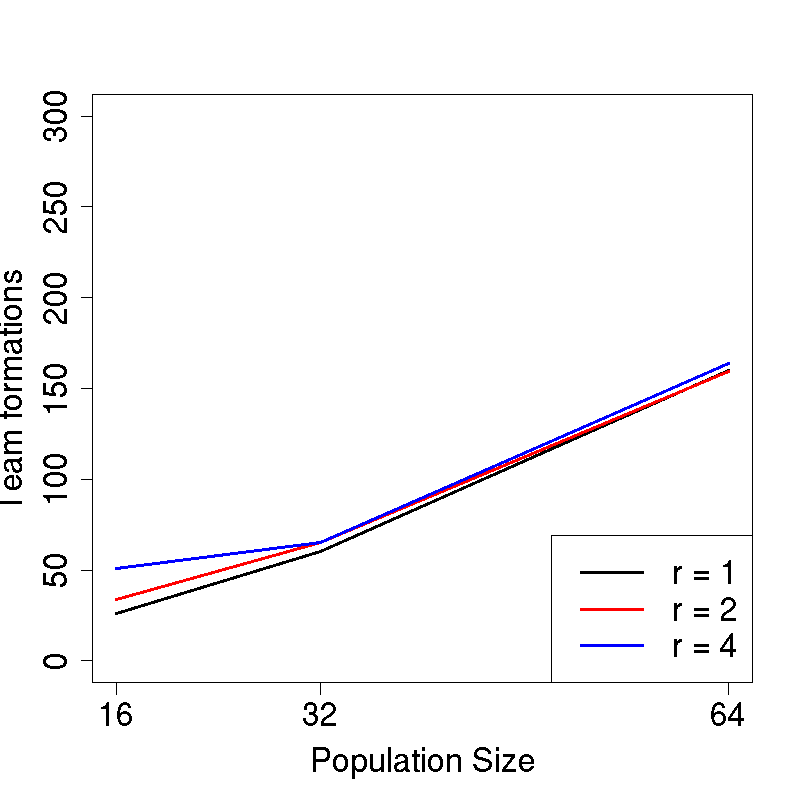
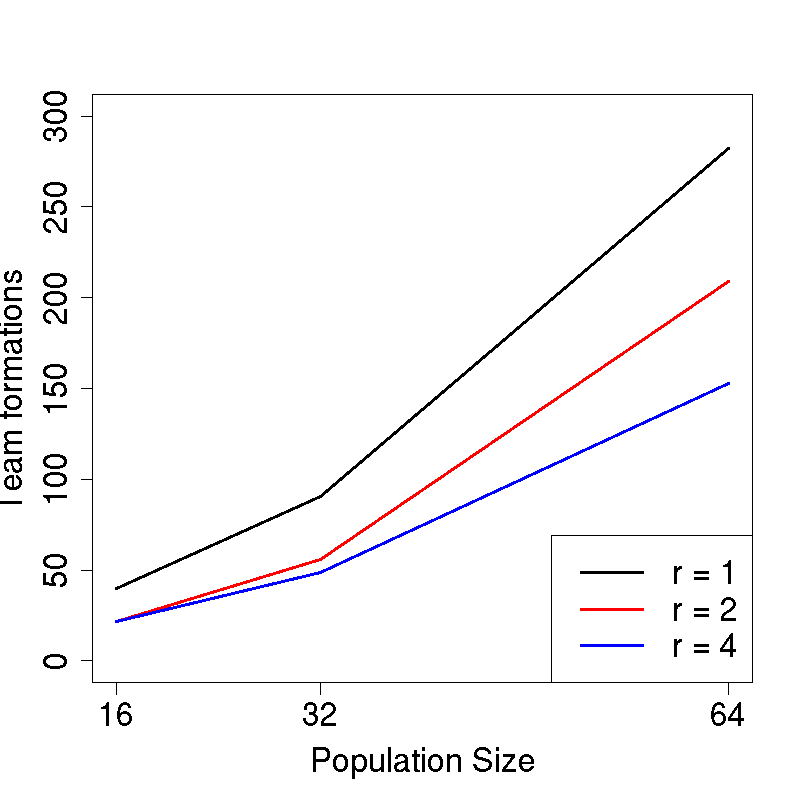
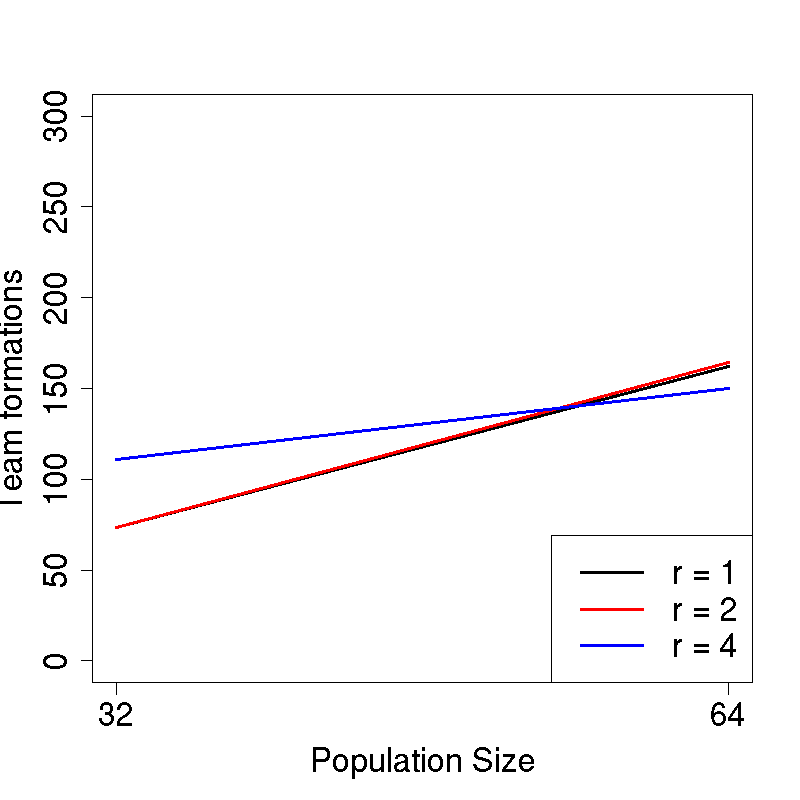
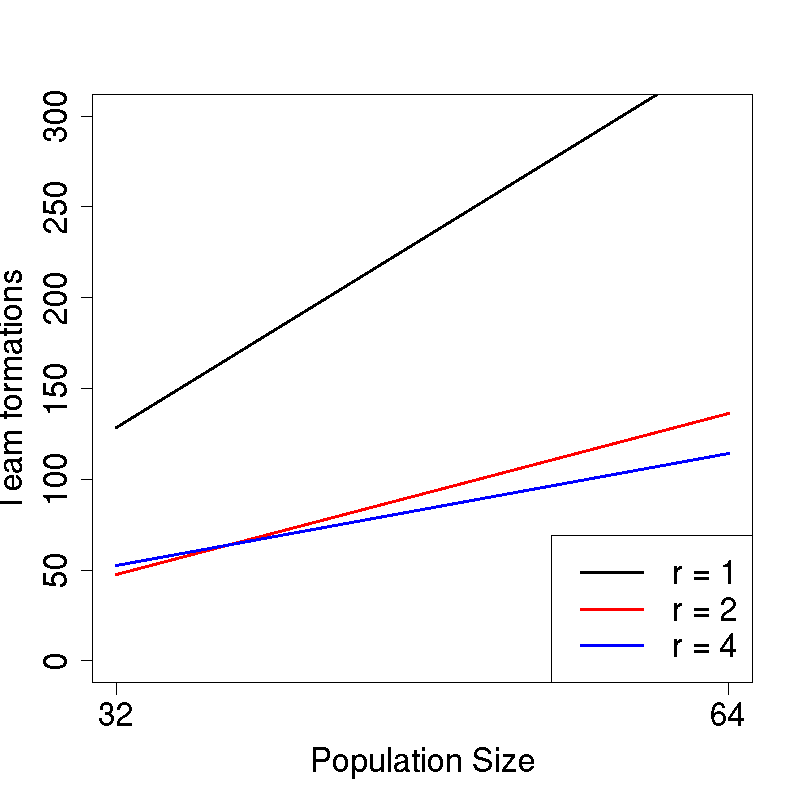
Number of team formations needed to reach consensus as a function of the population size
The following figures show number of team formations needed to reach consensus as a function of the population size.
2 Teams
| 2 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
4 Teams
| 4 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |
8 Teams
| 8 Teams |
|---|
| Majority Rule | Expert Rule |
|---|
 |
 |