| Submitted
to ICRA 2009
Table of Contents |
 |
Modelled collisions :
The following type of collisions is modelled both in the simulations and the analytical model.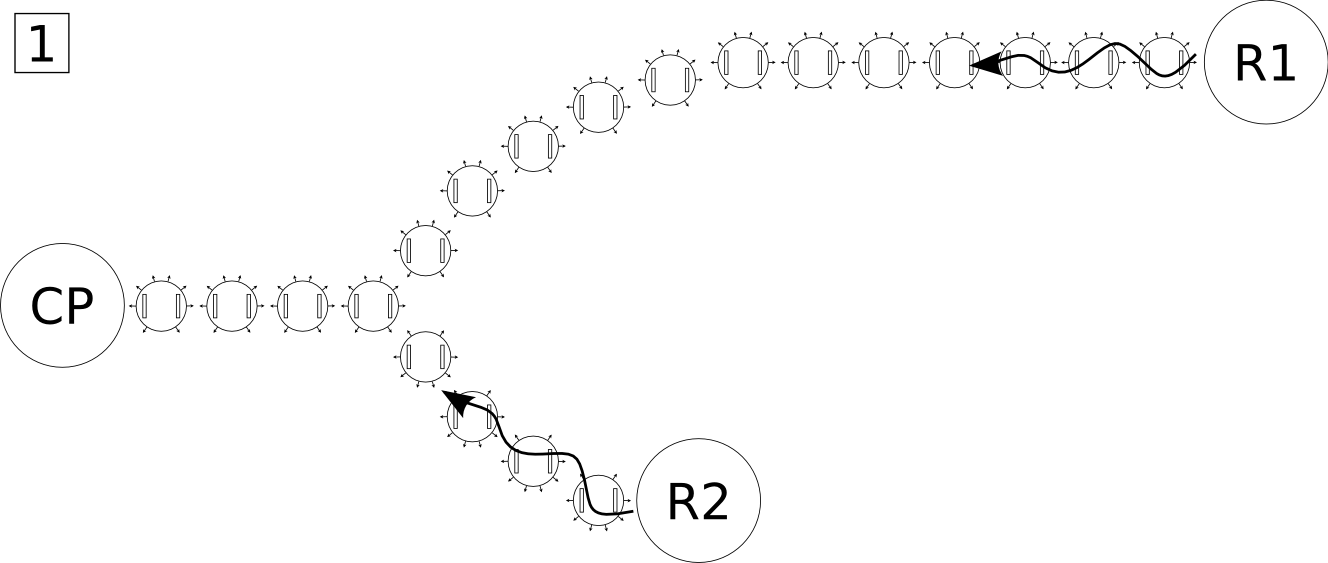
1. Two virtual ants are emitted from each resource R1 and R2
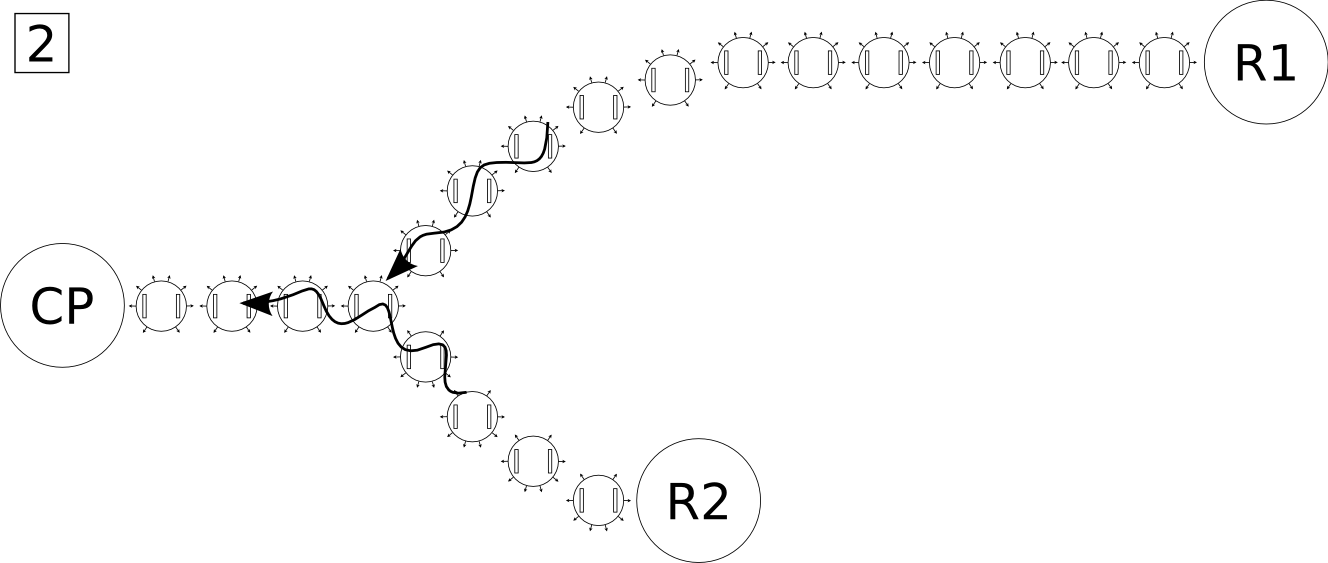
2. A virtual ant is already going through the junction of the two path. The second virtual ant will crash into the first one.
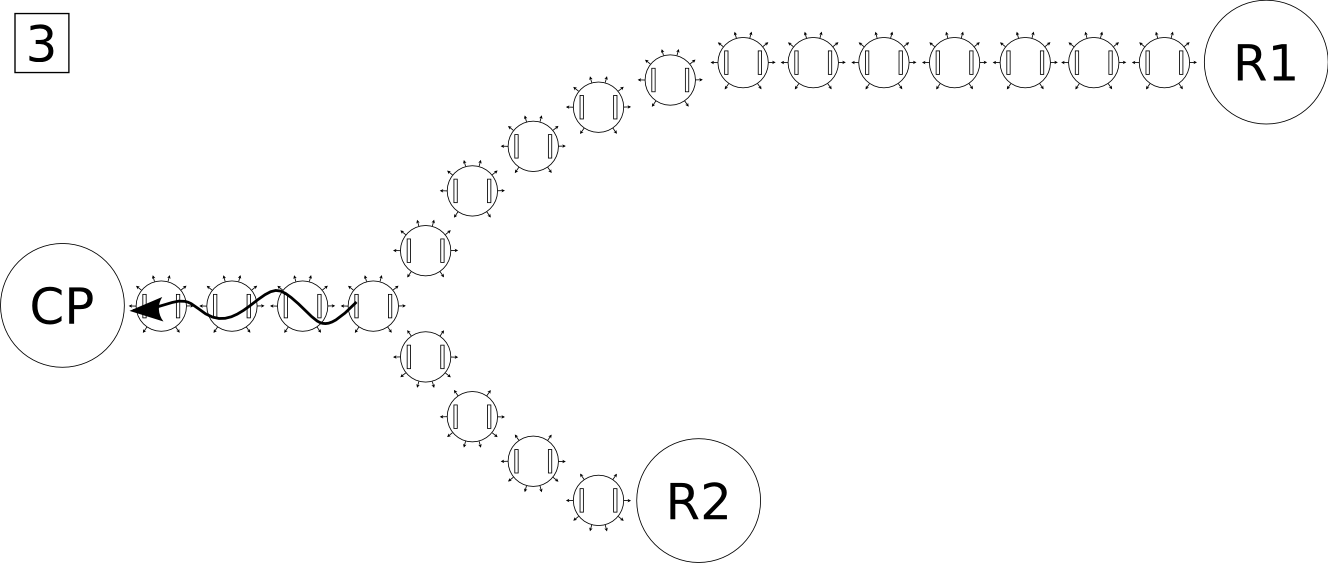
3. The virtual ant that crashed has disappeared, while the first one has succesfully made it's way to the central place.
Non-modelled collisions :
The following type of collisions is not modelled in the simulations nor in the analytical model. This creates the difference observed between real experiments and the results of the two models.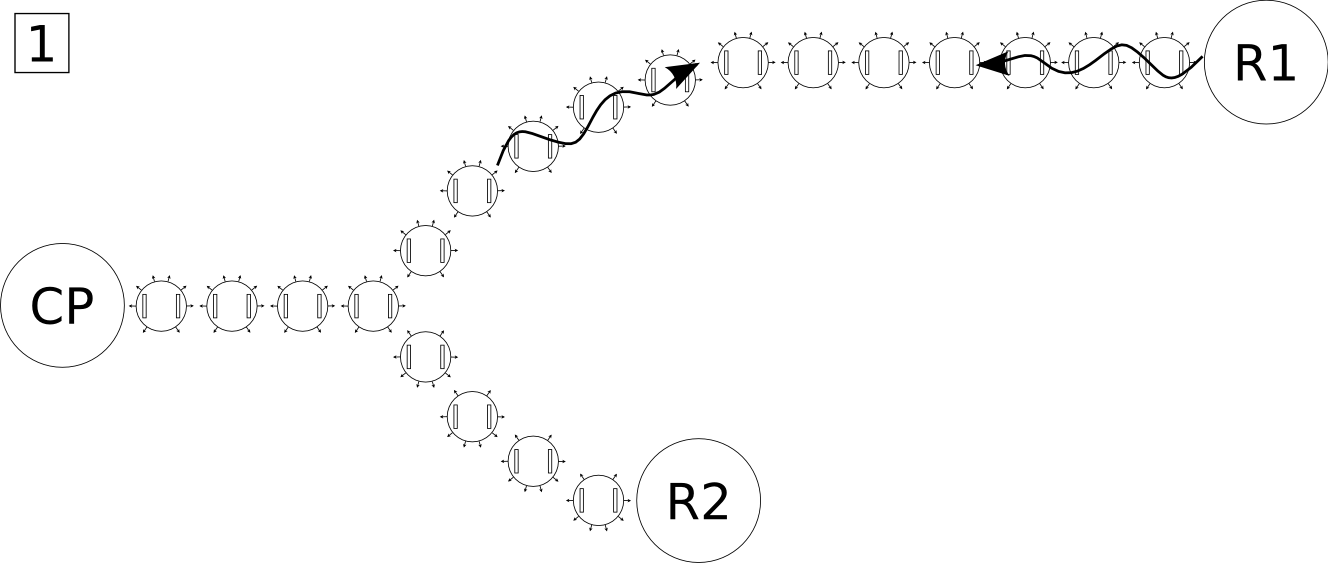
1. Two virtual ants are travelling along the same chain of robots in opposite directions.
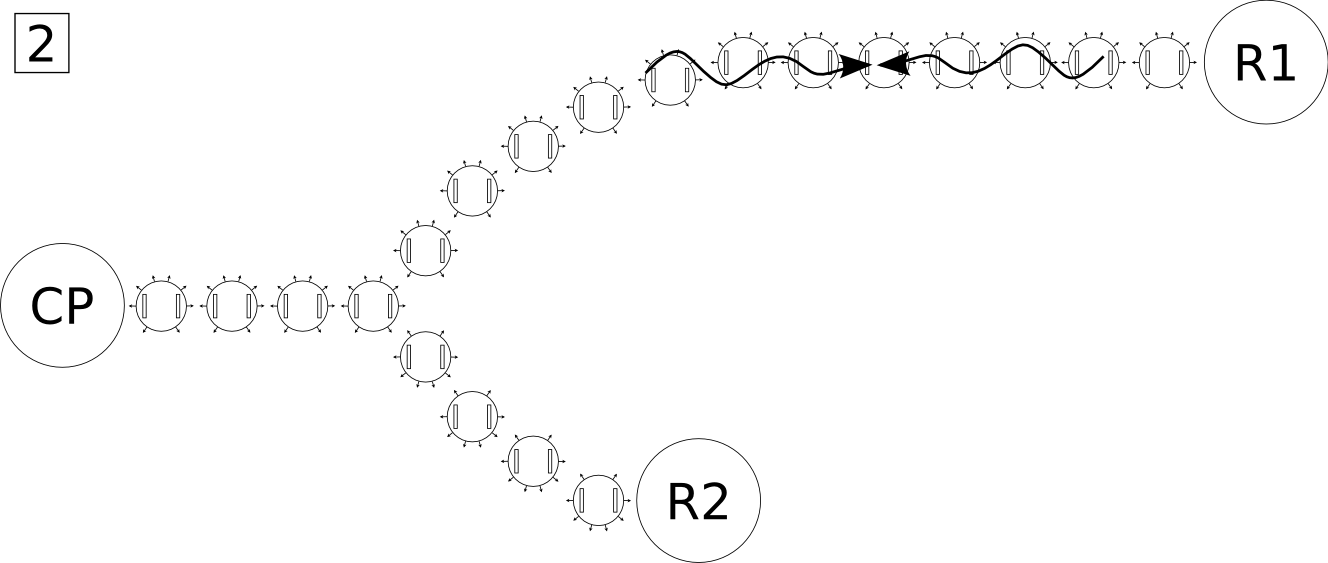
2. The two virtual ants are face to face. In reality there is a probability that one of the two virtual ant vanish because exactly during the tranmission of the infrared signal of the other virtual ant. This phenomenon was not implemented in the models but is shown to favour the selection of the closest resource because this type of collision is more likely to occur on a long path.
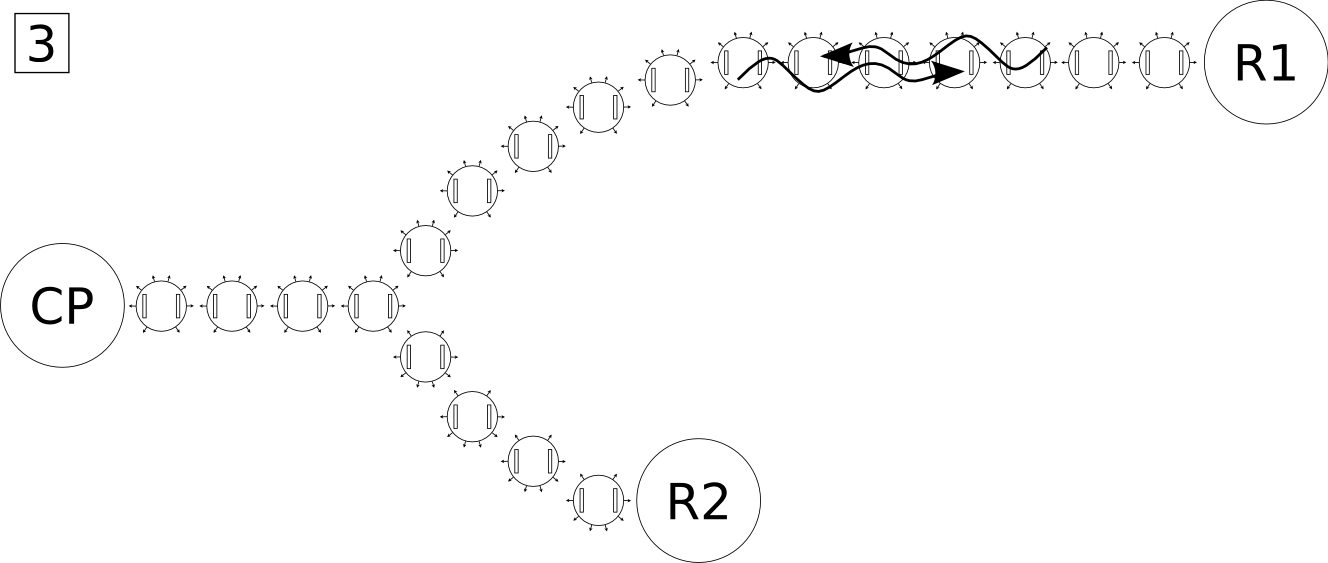
3. The models assume that the virtual ants manage to coexist during a short time. This is also implemented on the real robots, but there remains a probability that the virtual ants do not cross, but rather collide.
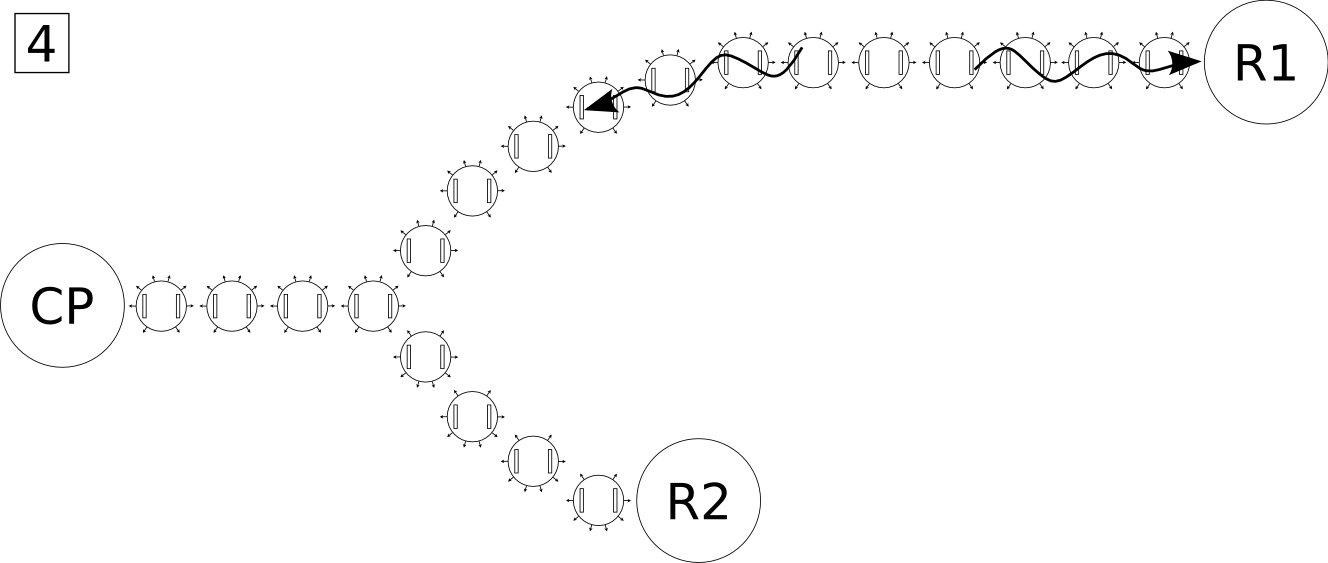
4. If the virtual ants managed to go through each other, they continue moving along the path.
Real Experiments Movies:
 |
 |
| Resources at
equal distances Full length (10mins, 19MB) Accelerated x20 (30s, 2MB) |
Resources at
different distances Full length (10mins, 19MB) Accelerated x20 (30s, 2MB) |
Additional pictures :
 |
 |
 |
 |
