Supporting material for the paper:
Learning from House-Hunting Ants:
Collective Decision-Making in
Organic Computing Systems
by Arne Brutschy, Alexander Scheidler, Martin Middendorf, Daniel Merkle
March 2008
Details on Runtime Functions
Runtime functions were used to generate runtimes for each job/slices pair in the
system. Each function generates a set of runtimes for a single job, defining the
progression of job runtime with increasing number of slices configured for this
job. The generated runtimes exhibit a characteristic defined by the underlying
runtime function, i.e. the exponential runtime function creates runtimes which
are exponentially decreasing with increasing number of slices.
Runtimes were generated as follows.  denotes the
class of a runtime function. Each class consists of a base function
denotes the
class of a runtime function. Each class consists of a base function
 , which was used to create the
function's values on an interval of
, which was used to create the
function's values on an interval of  . Afterwards,
. Afterwards,
 was used to
generate random start- and endpoints (uniform distribution). Finally, the function
values generated by were scaled to the random generated start- and
endpoints and the required number of data values (s values, one for each slice
configuration) were extracted.
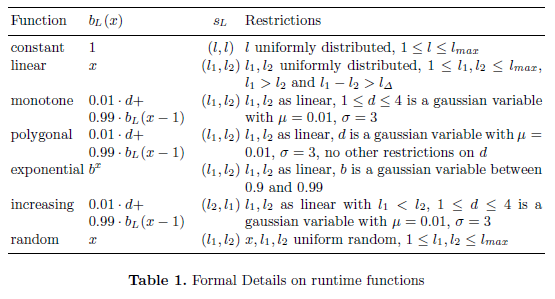
Table 1 lists all base functions and restrictions. Minimal runtime used in
the experiments was
was used to
generate random start- and endpoints (uniform distribution). Finally, the function
values generated by were scaled to the random generated start- and
endpoints and the required number of data values (s values, one for each slice
configuration) were extracted.
Table 1 lists all base functions and restrictions. Minimal runtime used in
the experiments was  , maximal runtime was
, maximal runtime was  . The required
minimal difference between start- and endpoint used by some functions was set
to
. The required
minimal difference between start- and endpoint used by some functions was set
to  .
.
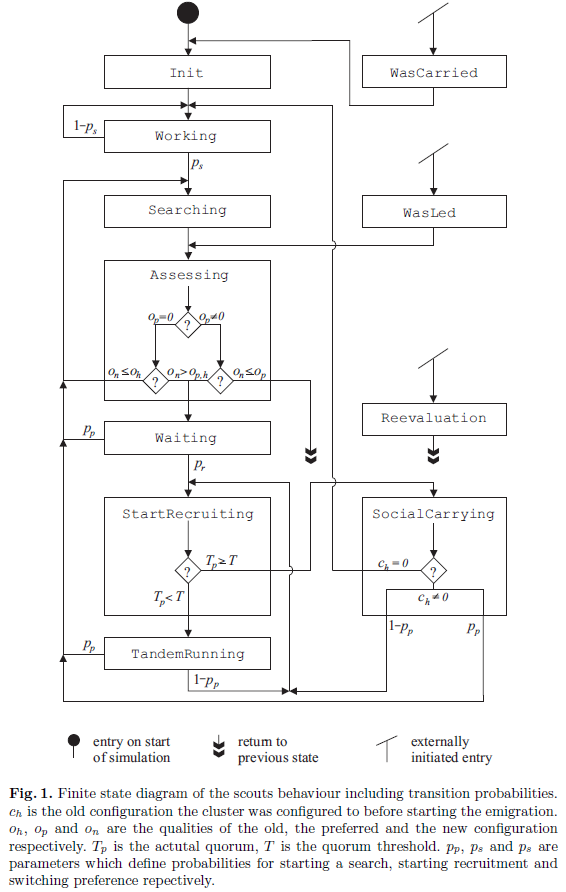
Finite State Diagram
The following finite state diagram represents the states of the scout units of the
ant-inspired models. See caption for further details.
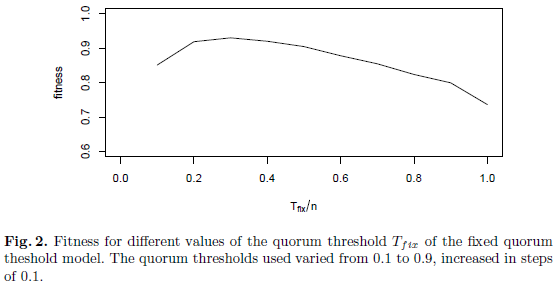
Optimization of T_fix
Figure 2 shows the optimization of the quorum threshold parameter Tfix for the
fixed quorum theshold model regarding the fitness.