|
In a multi-robot system the physical limitations of the individual robots can be overcome when robots have
the ability to self-assemble, thus forming larger composite robotic
entities. However, existing robotic systems capable of self-assembly
have little or no control over the morphology of the self-assembled
entities. This restricts the adaptability of such systems, since
robots can carry out certain tasks more efficiently if their
morphology is specialized to the task.
In this study, we extend the distributed mechanism presented in Christensen et al. 2007 that allows
autonomous mobile robots to self-assemble into specific
morphologies. The morphologies are generated based on a simple
language, SWARMORPH-script, that allows for concise descriptions of
the rules that govern the distributed morphology growth process. Local
visual communication allows physically connected robots to send and
receive strings. A string can be a rule identifier that triggers
execution of predefined logic for extending a
morphology. Alternatively, whole scripts can be communicated and
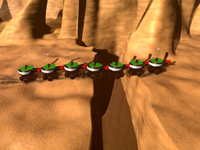
subsequently executed on the receiving robot. On real self-propelled
robots capable of self-assembly, we demonstrate how specific
morphologies can be constructed, how the size of a morphology can be
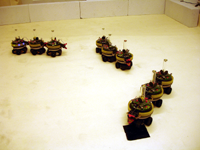
regulated, and how multiple identical morphologies can be
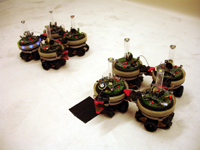
assembled. We also show how the transmission of entire scripts gives
the robots the capacity to participate in the formation of
morphologies of which they had no apriori knowledge.
|

|