|
There are several examples of robotic systems in which mobile
autonomous robots self-assemble into a larger connected robotic entity. The
self-assembled entity can tackle tasks that are beyond the capabilities
of the individual constituent robots. However, existing systems are for
the most part incapable of forming different, specific morphologies. This
restricts the adaptability of such systems, since certain tasks can be
more efficiently carried out by self-assembled entities with specialised
morphologies. An entity with an elongated structure, for example, can cross
wide holes, whereas a more dense structure provides more stability for rough
terrain navigation.
We propose a novel distributed mechanism that allows autonomous mobile robots
to self-assemble into specific morphologies. Global morphologies are
`grown' using strictly local visual perception only. Robots that are part
of the connected entity indicate where new robots should attach in order to
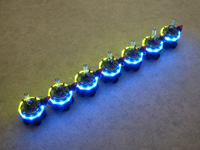
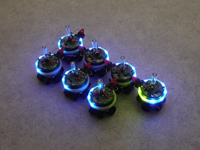
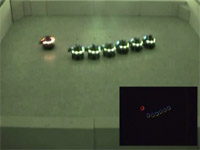
extend the local structure appropriately. We demonstrate the efficacy of the
mechanism by letting groups of 7 real robots self-assemble into different
morphologies (line, star, arrow, and rectangle).
|
|